Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Brochure - Actiwhite PWLS 9860.02012013Documento12 páginasBrochure - Actiwhite PWLS 9860.02012013J C Torres FormalabAinda não há avaliações
- EIL 6-51-0051-Rev 06 - 1.1kv-Xlpe - Dimension Cat - B Armour-BbpDocumento2 páginasEIL 6-51-0051-Rev 06 - 1.1kv-Xlpe - Dimension Cat - B Armour-BbpShubham BaderiyaAinda não há avaliações
- Madam Shazia PaperDocumento14 páginasMadam Shazia PaperpervaizhejAinda não há avaliações
- YS1700 Drum Level ControlDocumento2 páginasYS1700 Drum Level ControlIdriss BarçaAinda não há avaliações
- Sun God NikaDocumento2 páginasSun God NikaElibom DnegelAinda não há avaliações
- First Aid Transportation of The InjuredDocumento30 páginasFirst Aid Transportation of The InjuredMuhammad Naveed Akhtar100% (1)
- INDUSTRIAL PHD POSITION - Sensor Fusion Enabled Indoor PositioningDocumento8 páginasINDUSTRIAL PHD POSITION - Sensor Fusion Enabled Indoor Positioningzeeshan ahmedAinda não há avaliações
- Libel Arraignment Pre Trial TranscriptDocumento13 páginasLibel Arraignment Pre Trial TranscriptAnne Laraga LuansingAinda não há avaliações
- Dekker V Weida Amicus Brief by 17 AGsDocumento35 páginasDekker V Weida Amicus Brief by 17 AGsSarah WeaverAinda não há avaliações
- Supreme Court Case Analysis-Team ProjectDocumento5 páginasSupreme Court Case Analysis-Team ProjectJasmineA.RomeroAinda não há avaliações
- How To Build Yam Chips Production PlantDocumento11 páginasHow To Build Yam Chips Production PlantVu Thieu TuanAinda não há avaliações
- The Story of An Hour QuestionpoolDocumento5 páginasThe Story of An Hour QuestionpoolAKM pro player 2019Ainda não há avaliações
- Annotated Bibliography 2Documento3 páginasAnnotated Bibliography 2api-458997989Ainda não há avaliações
- Research in International Business and Finance: Huizheng Liu, Zhe Zong, Kate Hynes, Karolien de Bruyne TDocumento13 páginasResearch in International Business and Finance: Huizheng Liu, Zhe Zong, Kate Hynes, Karolien de Bruyne TDessy ParamitaAinda não há avaliações
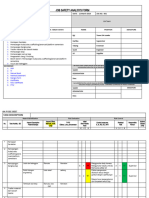
- JSA FormDocumento4 páginasJSA Formfinjho839Ainda não há avaliações
- Skills Check Extra 2ADocumento1 páginaSkills Check Extra 2AVishmi JayawardeneAinda não há avaliações
- LNWH Alcohol GUIDELINE SUMMARY 2018Documento1 páginaLNWH Alcohol GUIDELINE SUMMARY 2018Ai Hwa LimAinda não há avaliações
- AnkitKumar InternshalaResume PDFDocumento2 páginasAnkitKumar InternshalaResume PDFkusha010Ainda não há avaliações
- Rules of Bursa Malaysia Securities Clearing 2019Documento11 páginasRules of Bursa Malaysia Securities Clearing 2019Evelyn SeethaAinda não há avaliações
- N164.UCPE12B LANmark - OF - UC - 12x - Singlemode - 9 - 125 - OS2 - PE - BlackDocumento2 páginasN164.UCPE12B LANmark - OF - UC - 12x - Singlemode - 9 - 125 - OS2 - PE - BlackRaniaTortueAinda não há avaliações
- NHD Process PaperDocumento2 páginasNHD Process Paperapi-122116050Ainda não há avaliações
- La La Mei Seaside Resto BAR: Final PlateDocumento4 páginasLa La Mei Seaside Resto BAR: Final PlateMichael Ken FurioAinda não há avaliações
- 4.1.1.6 Packet Tracer - Explore The Smart Home - ILM - 51800835Documento4 páginas4.1.1.6 Packet Tracer - Explore The Smart Home - ILM - 51800835Viet Quoc100% (1)
- Week1 TutorialsDocumento1 páginaWeek1 TutorialsAhmet Bahadır ŞimşekAinda não há avaliações
- Ramo's TheoremDocumento4 páginasRamo's TheoremlucasAinda não há avaliações
- Facts About The TudorsDocumento3 páginasFacts About The TudorsRaluca MuresanAinda não há avaliações
- AJ IntroductionDocumento31 páginasAJ IntroductiontrollergamehuydkAinda não há avaliações
- Solitax SCDocumento8 páginasSolitax SCprannoyAinda não há avaliações
- Aryan Civilization and Invasion TheoryDocumento60 páginasAryan Civilization and Invasion TheorySaleh Mohammad Tarif 1912343630Ainda não há avaliações
- Tech SharmitDocumento16 páginasTech SharmitRishu SinhaAinda não há avaliações