Você também pode gostar
- System of Particles and Rotational MotionDocumento10 páginasSystem of Particles and Rotational MotionpkmuhsinAinda não há avaliações
- Determination of Specific Gravity by Pcynometer TestDocumento13 páginasDetermination of Specific Gravity by Pcynometer TestIkhwan Z.94% (49)
- Class: Xi: Unit-IV: Chapter-7: System of Particles and Rotational MotionDocumento11 páginasClass: Xi: Unit-IV: Chapter-7: System of Particles and Rotational MotionSuyash RoyAinda não há avaliações
- Rigid Body DynamicsDocumento55 páginasRigid Body DynamicsKenn ConsueloAinda não há avaliações
- Activate 2 Physics Chapter3 AnswersDocumento6 páginasActivate 2 Physics Chapter3 AnswersJohn LebizAinda não há avaliações
- Moment of InertiaDocumento6 páginasMoment of Inertiarohan_nerlekar794100% (3)
- 03 EMT PresentationDocumento33 páginas03 EMT PresentationMiguel LnAinda não há avaliações
- The Second Law of Thermodynamics: Mehmet KanogluDocumento29 páginasThe Second Law of Thermodynamics: Mehmet KanogluMalav PurohitAinda não há avaliações
- Vapor Pressure of A Liquid SolutionDocumento40 páginasVapor Pressure of A Liquid Solutionintania660% (1)
- CH 7, Session 1-4Documento7 páginasCH 7, Session 1-4Suyash RoyAinda não há avaliações
- Chapter 8 Rigid Body Rotation: Axis Direction Fixed: 1 Center of Mass of A Continuous Rigid BodyDocumento19 páginasChapter 8 Rigid Body Rotation: Axis Direction Fixed: 1 Center of Mass of A Continuous Rigid BodyJames MorseAinda não há avaliações
- 23068911013Documento2 páginas23068911013xttyzz03Ainda não há avaliações
- Angular MomentumDocumento6 páginasAngular Momentumprakush_prakushAinda não há avaliações
- Rotation Theory IDocumento6 páginasRotation Theory IMohammed Aftab AhmedAinda não há avaliações
- Work and Conservation of EnergyDocumento7 páginasWork and Conservation of EnergyNirmaan ShankerAinda não há avaliações
- Rotational Kinetic EnergyDocumento8 páginasRotational Kinetic EnergyMirza Khurram BaigAinda não há avaliações
- CH 10Documento9 páginasCH 10ArdvarkAinda não há avaliações
- PHY - 214-Rigid Body DynamicsDocumento14 páginasPHY - 214-Rigid Body DynamicsAbdulganeey Horlarmilekan MuheezAinda não há avaliações
- Chapter 10 Systems of Particles: Center of Mass (CM)Documento15 páginasChapter 10 Systems of Particles: Center of Mass (CM)Nitin DasAinda não há avaliações
- 6.7 Introduction Dynamics in Three Dimensions A. General PrinciplesDocumento12 páginas6.7 Introduction Dynamics in Three Dimensions A. General PrincipleselvyAinda não há avaliações
- AE5102 - Notes Set 3Documento14 páginasAE5102 - Notes Set 3L Diego Paredes EscolanAinda não há avaliações
- Rotation - IIT JEE ExamDocumento20 páginasRotation - IIT JEE Examfaizan123khanAinda não há avaliações
- Notes On Mechanical Vibrations: 1 Masses and Springs-The Linear OscillatorDocumento10 páginasNotes On Mechanical Vibrations: 1 Masses and Springs-The Linear Oscillatoramlandas08Ainda não há avaliações
- Experiment 12: Simple Harmonic Motion: I. About The ExperimentDocumento6 páginasExperiment 12: Simple Harmonic Motion: I. About The ExperimentAnurag SharmaAinda não há avaliações
- 16 Mechanics of Rigid Bodies NoteDocumento18 páginas16 Mechanics of Rigid Bodies NoteOlabode EgbinolaAinda não há avaliações
- Lesson11 12studysheet 2Documento2 páginasLesson11 12studysheet 2Henry HAinda não há avaliações
- HSSRPTR - Plus One Phy Questions Bank 2023 HssreporterDocumento98 páginasHSSRPTR - Plus One Phy Questions Bank 2023 HssreporterShimi BasheerAinda não há avaliações
- 03 - Moment of Inertia - Formulas, MOI of Objects (Solved Examples)Documento18 páginas03 - Moment of Inertia - Formulas, MOI of Objects (Solved Examples)upfaupAinda não há avaliações
- HSC Physics Circular Motion SummaryDocumento5 páginasHSC Physics Circular Motion SummaryShekharAinda não há avaliações
- HW 3 CMDocumento9 páginasHW 3 CMeddiejam1642Ainda não há avaliações
- JJJJDocumento26 páginasJJJJgangalapudisudhaAinda não há avaliações
- Module II: Relativity and Electrodynamics: Lecture 3: Relativistic Energy and MomentumDocumento16 páginasModule II: Relativity and Electrodynamics: Lecture 3: Relativistic Energy and MomentumgopalAinda não há avaliações
- Mechanics Lecture Notes 1 Lecture 4: Centre of MassDocumento2 páginasMechanics Lecture Notes 1 Lecture 4: Centre of MassIbrahim ShaaranyAinda não há avaliações
- Moment of InertiaDocumento19 páginasMoment of InertiaLionel Jospin Tizzy ZraAinda não há avaliações
- Moments of Inertia: Angular Momentum Angular VelocityDocumento8 páginasMoments of Inertia: Angular Momentum Angular Velocityleodavid87Ainda não há avaliações
- SHM NotesDocumento4 páginasSHM Notesgiulio.zizzo2850Ainda não há avaliações
- Tugas Pengganti UTS KelompokDocumento10 páginasTugas Pengganti UTS KelompokCem PakaAinda não há avaliações
- Moment of InertiaDocumento18 páginasMoment of InertiaAbdullah Mofarrah100% (1)
- Motion Along A Straight Line.: AP Physics C Review Equations For MechanicsDocumento4 páginasMotion Along A Straight Line.: AP Physics C Review Equations For MechanicsCyou97Ainda não há avaliações
- Astro Dynamics SummaryDocumento24 páginasAstro Dynamics SummaryJuan M.L.Ainda não há avaliações
- PS 320 - Classical Mechanics Reynolds ProblemsDocumento14 páginasPS 320 - Classical Mechanics Reynolds ProblemsSK MishraAinda não há avaliações
- Centroid SDocumento50 páginasCentroid SAnu ParameswaranAinda não há avaliações
- Oscillations: Institute of Lifelong Learning, University of DelhiDocumento36 páginasOscillations: Institute of Lifelong Learning, University of DelhiVenkataramanan SureshAinda não há avaliações
- PHYSICSDocumento35 páginasPHYSICSPrincess Mae AlejandrinoAinda não há avaliações
- Simple Harmonic Motion and Pendulums: SP211: Physics I Fall 2018 NameDocumento6 páginasSimple Harmonic Motion and Pendulums: SP211: Physics I Fall 2018 NamekaypamaAinda não há avaliações
- Satellite ReportDocumento87 páginasSatellite Reportkvk808Ainda não há avaliações
- Lecture Notes For Physical Chemistry II Quantum Theory and SpectroscoptyDocumento41 páginasLecture Notes For Physical Chemistry II Quantum Theory and Spectroscopty3334333Ainda não há avaliações
- System of Particles and Rotational MotionDocumento23 páginasSystem of Particles and Rotational MotionVIR MEHERAinda não há avaliações
- KS Chapter23 PDFDocumento29 páginasKS Chapter23 PDFrajpal146Ainda não há avaliações
- Mechanics V: Rotation: 1 2D Rotational KinematicsDocumento15 páginasMechanics V: Rotation: 1 2D Rotational Kinematics66 SB jay gotiAinda não há avaliações
- Centroids and Centre of GravityDocumento56 páginasCentroids and Centre of GravitydearsaswatAinda não há avaliações
- Introductory Problems: Problems I: Introductory Problems & Collisions in One DimensionDocumento4 páginasIntroductory Problems: Problems I: Introductory Problems & Collisions in One DimensionDiego ForeroAinda não há avaliações
- Mi 1Documento14 páginasMi 1mekoaaaAinda não há avaliações
- 7.4 Center of Mass Cog TorqueDocumento7 páginas7.4 Center of Mass Cog TorqueWong SunAinda não há avaliações
- Linear Coupled OscillatorsDocumento21 páginasLinear Coupled OscillatorsanonymousxxAinda não há avaliações
- Momentum: Nirmaan Shanker October 2015Documento7 páginasMomentum: Nirmaan Shanker October 2015Nirmaan ShankerAinda não há avaliações
- System of Particles and Rotational Motion Part 1 CH7Documento28 páginasSystem of Particles and Rotational Motion Part 1 CH7Rishab SharmaAinda não há avaliações
- Mod 9Documento13 páginasMod 9api-3766872Ainda não há avaliações
- Physics For Scientists and Engineers: Rotation of A Rigid BodyDocumento72 páginasPhysics For Scientists and Engineers: Rotation of A Rigid BodyJ KAinda não há avaliações
- Dynamics of RotationDocumento32 páginasDynamics of RotationMedha Jog KatdareAinda não há avaliações
- Assignment 4: Rigid Body Dynamics: Due April 14 at 11:59pmDocumento5 páginasAssignment 4: Rigid Body Dynamics: Due April 14 at 11:59pmMDR PRAPHUAinda não há avaliações
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Ainda não há avaliações
- AC, DC and Electrical Signals PDFDocumento4 páginasAC, DC and Electrical Signals PDFMercedes HunterAinda não há avaliações
- Element 3 ReviewerDocumento3 páginasElement 3 ReviewerMiyuki Henriette FujinomiyaAinda não há avaliações
- Reactive Power CompensationDocumento8 páginasReactive Power CompensationAnas ShaikhAinda não há avaliações
- Free Fall and Equations of MotionDocumento1 páginaFree Fall and Equations of MotionWeteachAinda não há avaliações
- 1N5758 EtcDocumento2 páginas1N5758 EtcRik StevenAinda não há avaliações
- Thermo AutosavedDocumento140 páginasThermo AutosavedMae noreen TobiasAinda não há avaliações
- Physics Formula and Unit ConversionDocumento5 páginasPhysics Formula and Unit ConversionMr. DADA100% (1)
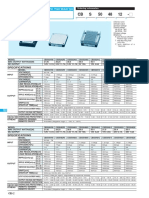
- DC-DC Converters Power Module Type DC-DC Converters Bus Converter - Power Module TypeDocumento10 páginasDC-DC Converters Power Module Type DC-DC Converters Bus Converter - Power Module TypetotoAinda não há avaliações
- Over Voltages and Insulation RequirementsDocumento10 páginasOver Voltages and Insulation RequirementsPrema ElizabethAinda não há avaliações
- Emf Course MaterialDocumento78 páginasEmf Course Materials sivaAinda não há avaliações
- Astm D 4052Documento8 páginasAstm D 4052UmarFida0% (1)
- Voltage Drop TablesDocumento1 páginaVoltage Drop TablesOsama ElhadadAinda não há avaliações
- Datasheet - DK 3 - III CMES 25. Gas Diaphragm PumpDocumento7 páginasDatasheet - DK 3 - III CMES 25. Gas Diaphragm Pumpnamdongvan8143Ainda não há avaliações
- Activity 7 Kirchhoffs-Rules Data SheetDocumento3 páginasActivity 7 Kirchhoffs-Rules Data SheetPamela Althea LomagdongAinda não há avaliações
- Faradays LawDocumento26 páginasFaradays LawBravoAinda não há avaliações
- Section 2: Power: Edexcel FM Mechanics Work, Energy & PowerDocumento4 páginasSection 2: Power: Edexcel FM Mechanics Work, Energy & PowersadsadAinda não há avaliações
- TRG-10015-2009-V0 - (The Effect of Directional Elements of SEL Relay (32Q and 32V) )Documento47 páginasTRG-10015-2009-V0 - (The Effect of Directional Elements of SEL Relay (32Q and 32V) )mendezhandaAinda não há avaliações
- Distillation and AbsorptionDocumento7 páginasDistillation and AbsorptionArsyad SafaiAinda não há avaliações
- Momentum Analysis of Flow Systems: Hasan Hac IşevkiDocumento52 páginasMomentum Analysis of Flow Systems: Hasan Hac IşevkiMuhammad UsamaAinda não há avaliações
- Velocity Dependent Force ProblemsDocumento5 páginasVelocity Dependent Force ProblemsspoonrooAinda não há avaliações
- International System of Units (SI Units)Documento13 páginasInternational System of Units (SI Units)Aftab AhmadAinda não há avaliações
- Attachment To QuizesDocumento21 páginasAttachment To QuizesLorna V. AciertoAinda não há avaliações
- Objectives:: Experiment No.3 Radial ConductionDocumento5 páginasObjectives:: Experiment No.3 Radial ConductionWalid AdnanAinda não há avaliações
- Cengel 열역학 솔루션 1장Documento56 páginasCengel 열역학 솔루션 1장minsu08311Ainda não há avaliações
- Measuring Energy Input and OutputDocumento8 páginasMeasuring Energy Input and OutputRay PeramathevanAinda não há avaliações