Você também pode gostar
- Origen de ideas de investigaciónDocumento4 páginasOrigen de ideas de investigaciónCentro Educativo Integral Bucarelly0% (1)
- Resueltostema6 PDFDocumento36 páginasResueltostema6 PDFSebastiàn RugelesAinda não há avaliações
- Teoría del desarrollo cognitivo de Piaget: estadios y pruebas PiagetanasDocumento93 páginasTeoría del desarrollo cognitivo de Piaget: estadios y pruebas PiagetanasJaviera IglesisAinda não há avaliações
- Matematica 6to - 1er BimDocumento15 páginasMatematica 6to - 1er Bimdavid0% (1)
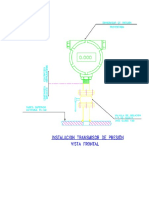
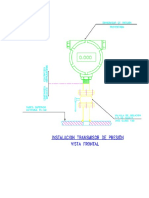
- Dibujo Montaje Transmisor Presión PDFDocumento1 páginaDibujo Montaje Transmisor Presión PDFfsalinas_793671Ainda não há avaliações
- Asistencia de LiveDocumento2 páginasAsistencia de Livefsalinas_793671Ainda não há avaliações
- Dibujo Montaje Transmisor Presión PDFDocumento1 páginaDibujo Montaje Transmisor Presión PDFfsalinas_793671Ainda não há avaliações
- Diario y TDocumento4 páginasDiario y Tfsalinas_793671Ainda não há avaliações
- Tarea 2Documento2 páginasTarea 2fsalinas_793671Ainda não há avaliações
- Día Del ViajeDocumento1 páginaDía Del Viajefsalinas_793671Ainda não há avaliações
- Agregar A La Respuesta de La 1Documento1 páginaAgregar A La Respuesta de La 1fsalinas_793671Ainda não há avaliações
- 304100514bla Bla BlaDocumento8 páginas304100514bla Bla Blafsalinas_793671Ainda não há avaliações
- ComunicadoDocumento1 páginaComunicadofsalinas_793671Ainda não há avaliações
- Codigo Assembler Lab 4Documento4 páginasCodigo Assembler Lab 4fsalinas_793671Ainda não há avaliações
- Lab 5 FinalDocumento18 páginasLab 5 Finalfsalinas_793671Ainda não há avaliações
- Visio-Malla Ica 08.07.2008Documento1 páginaVisio-Malla Ica 08.07.2008fsalinas_793671Ainda não há avaliações
- Trabajo VisionDocumento2 páginasTrabajo Visionfsalinas_793671Ainda não há avaliações
- Malla Ica B-N Con Total de Horas y Creditos-1Documento1 páginaMalla Ica B-N Con Total de Horas y Creditos-1fsalinas_793671Ainda não há avaliações
- ANTONIMOSDocumento5 páginasANTONIMOSGiovanni Serva Canchanya0% (1)
- Qué Fue La CosiataDocumento14 páginasQué Fue La Cosiataledis vergaraAinda não há avaliações
- Dimensiones de SiembraDocumento2 páginasDimensiones de SiembraJESUS ERNESTO PE�ARANDA LOPEZAinda não há avaliações
- De Qué Manera Los Elementos Estéticos Que Introdujo Oscar Niemeyer en Brasilia, Son Aplicables en La Arquitectrua de Las Estructruras Gubernamentales de Bogotá 1Documento100 páginasDe Qué Manera Los Elementos Estéticos Que Introdujo Oscar Niemeyer en Brasilia, Son Aplicables en La Arquitectrua de Las Estructruras Gubernamentales de Bogotá 1Ricardo Andres Bravo QuirogaAinda não há avaliações
- Adm - 2017 - Investigación e Innovación Tecnológica - MaDocumento68 páginasAdm - 2017 - Investigación e Innovación Tecnológica - MaIVAN HAROLD LAZO RAMOSAinda não há avaliações
- Circular de Padres de Partidos Políticos 2023 PDFDocumento2 páginasCircular de Padres de Partidos Políticos 2023 PDFAlvaro Barboza MezaAinda não há avaliações
- Tipos de Argumentos Según RazonamientoDocumento3 páginasTipos de Argumentos Según Razonamientojavier_jjAinda não há avaliações
- Carta AbiertaDocumento3 páginasCarta AbiertaLizetth PerezAinda não há avaliações
- 10 famosos con autismo desconocidoDocumento10 páginas10 famosos con autismo desconocidoHansi VillacobAinda não há avaliações
- El Olor de Otras Palabras, Jósbel Caraballo LoboDocumento31 páginasEl Olor de Otras Palabras, Jósbel Caraballo Lobojosbel88208Ainda não há avaliações
- Carpe DiemDocumento13 páginasCarpe DiemGustavoCruzVegaAinda não há avaliações
- 1 01 03 Introduccion-a-la-MatematicaDocumento4 páginas1 01 03 Introduccion-a-la-MatematicaFranRibaAinda não há avaliações
- Discriminación visual y auditivaDocumento6 páginasDiscriminación visual y auditivaVia SajaAinda não há avaliações
- Rehabilitacion VestibularDocumento14 páginasRehabilitacion VestibulargemapesfAinda não há avaliações
- Estrategias de "Debt Push-Down " de España A LatinoaméricaDocumento47 páginasEstrategias de "Debt Push-Down " de España A LatinoaméricaMario YepesAinda não há avaliações
- Matemáticas en acciónDocumento8 páginasMatemáticas en acciónyaneth agudeloAinda não há avaliações
- El SustitutoDocumento2 páginasEl SustitutoLucia SalvadorAinda não há avaliações
- MitoabensourDocumento6 páginasMitoabensoursiteniaelcorreo7Ainda não há avaliações
- MergedDocumento69 páginasMergedAlan Varela GarcíaAinda não há avaliações
- Caso Practivo Unidad 3 Matematicas AplicadaDocumento8 páginasCaso Practivo Unidad 3 Matematicas AplicadaandreaAinda não há avaliações
- Valor Del Maestro CristianoDocumento44 páginasValor Del Maestro CristianoLisbeth Jimenez100% (1)
- Primer Gobierno de Gonzalo Sanchez de LozadaDocumento4 páginasPrimer Gobierno de Gonzalo Sanchez de LozadaPrisyla GirondaAinda não há avaliações
- Informe Del Diagnostico de La EmpresaDocumento10 páginasInforme Del Diagnostico de La EmpresaMaria C RojasAinda não há avaliações
- Himno NacionalDocumento3 páginasHimno Nacionalschuber17Ainda não há avaliações
- Tarea MotrizDocumento25 páginasTarea Motrizjoseti275Ainda não há avaliações
- Negociación Esencial Gavin KennedyDocumento6 páginasNegociación Esencial Gavin KennedyYago Nahuel EscobarAinda não há avaliações