Você também pode gostar
- Human-Robot Interaction: How Do Personality Traits Affect Attitudes Towards Robot?Documento7 páginasHuman-Robot Interaction: How Do Personality Traits Affect Attitudes Towards Robot?vinjolitesAinda não há avaliações
- Social Credibility of A RobotDocumento6 páginasSocial Credibility of A RobotKrishnakant BeheraAinda não há avaliações
- Da Silva (2018) - Experiences of A Motivational Interview Delivered by A Robot Qualitative StudyDocumento13 páginasDa Silva (2018) - Experiences of A Motivational Interview Delivered by A Robot Qualitative StudySebastian FitzekAinda não há avaliações
- Learning Online Dating Preferences From Neuroimaging Data: Mira NenchevaDocumento5 páginasLearning Online Dating Preferences From Neuroimaging Data: Mira NenchevaAnonymous 6NPTZLZHjAinda não há avaliações
- tmpEDBB TMPDocumento11 páginastmpEDBB TMPFrontiersAinda não há avaliações
- Interaction Between Human and Robot - An Affect-Inspired ApproachDocumento28 páginasInteraction Between Human and Robot - An Affect-Inspired ApproachEseoghene EfekodoAinda não há avaliações
- Living with Robots: Emerging Issues on the Psychological and Social Implications of RoboticsNo EverandLiving with Robots: Emerging Issues on the Psychological and Social Implications of RoboticsAinda não há avaliações
- (PPNC) ProposalDocumento5 páginas(PPNC) ProposalEMPTY 2523Ainda não há avaliações
- TMP ED24Documento10 páginasTMP ED24FrontiersAinda não há avaliações
- Bailenson & Yee - Digi Chameleons (2005)Documento6 páginasBailenson & Yee - Digi Chameleons (2005)Joaquin AsiainAinda não há avaliações
- Sociality of Robots Do Robots Construct or CollapseDocumento2 páginasSociality of Robots Do Robots Construct or Collapsegabriel vítorAinda não há avaliações
- NARSDocumento19 páginasNARSBenjamin MeguiraAinda não há avaliações
- Critic, Compatriot, or Chump?: Responses To Robot Blame AttributionDocumento7 páginasCritic, Compatriot, or Chump?: Responses To Robot Blame Attributionapi-26010865Ainda não há avaliações
- Effect of Gender Identity On Social Cognition Towards Transgender PeopleDocumento6 páginasEffect of Gender Identity On Social Cognition Towards Transgender PeopleMohua DasguptaAinda não há avaliações
- Criminal Justice Studies A CriticalDocumento22 páginasCriminal Justice Studies A CriticalCOLDAinda não há avaliações
- Anthropomorphic User Interface Feedback in A Sewing Context and AffordancesDocumento13 páginasAnthropomorphic User Interface Feedback in A Sewing Context and AffordancestomasAinda não há avaliações
- User Perceptions of Anthropomorphic Robots As Monitoring DevicesDocumento25 páginasUser Perceptions of Anthropomorphic Robots As Monitoring DevicessuudfiinAinda não há avaliações
- Solid Waste Management Perspective of Grade 11 STEM Students in Pitogo High School Final PresentationDocumento16 páginasSolid Waste Management Perspective of Grade 11 STEM Students in Pitogo High School Final PresentationGabrielle Louise ValenciaAinda não há avaliações
- Human Factors Considerations For Quantifiable Human State in Physical Human-Robot Interaction - A Literature ReviewDocumento33 páginasHuman Factors Considerations For Quantifiable Human State in Physical Human-Robot Interaction - A Literature ReviewPiyumal SamarathungaAinda não há avaliações
- Running Head: PHASE I, II, & IIIDocumento13 páginasRunning Head: PHASE I, II, & IIIapi-312892098Ainda não há avaliações
- Ap Research - Inquiry Proposal Form: EbscohostDocumento2 páginasAp Research - Inquiry Proposal Form: Ebscohostapi-535737439Ainda não há avaliações
- Experimental Design For Human-Robot Interaction With Assistive TechnologyDocumento8 páginasExperimental Design For Human-Robot Interaction With Assistive TechnologyMiChelle FlOres SaavEdraAinda não há avaliações
- Essay On Personality TraitsDocumento7 páginasEssay On Personality Traitsafabjgbtk100% (2)
- Animal RobotDocumento11 páginasAnimal RobotnazmiyekeAinda não há avaliações
- Digital Business Individual Essay Session 9Documento2 páginasDigital Business Individual Essay Session 9Bernard BrinkelAinda não há avaliações
- Journal Pre-Proof: Computers in Human BehaviorDocumento39 páginasJournal Pre-Proof: Computers in Human BehaviorIoana BiticaAinda não há avaliações
- The Effects and Changes Brought by Internet Pornography On Usc-Tc Male Engineering StudentsDocumento52 páginasThe Effects and Changes Brought by Internet Pornography On Usc-Tc Male Engineering StudentsmpotianAinda não há avaliações
- People's Judgments of Human and Robot Behaviors: A Robust Set of Behaviors and Some DiscrepanciesDocumento3 páginasPeople's Judgments of Human and Robot Behaviors: A Robust Set of Behaviors and Some DiscrepanciesShahid KhanAinda não há avaliações
- HFES 2015 Inbar Meyer - Manners MatterDocumento5 páginasHFES 2015 Inbar Meyer - Manners MatterohadbinbarAinda não há avaliações
- Seminar Paper Abstract SubmissionDocumento9 páginasSeminar Paper Abstract SubmissionPRATIMA SHARMAAinda não há avaliações
- Are You Looking at Me Perception of Robot Attention Is Mediated by Gaze Type and Group SizeDocumento7 páginasAre You Looking at Me Perception of Robot Attention Is Mediated by Gaze Type and Group SizeSarah CosentinoAinda não há avaliações
- Research-Protocol BORROMEOFERNANDEZDocumento6 páginasResearch-Protocol BORROMEOFERNANDEZRonan PunzalanAinda não há avaliações
- Toddlers Bond With RobotDocumento5 páginasToddlers Bond With RobotMinh Nhat ThanAinda não há avaliações
- Ifs Final UpdDocumento9 páginasIfs Final Updapi-316855512Ainda não há avaliações
- p2 Final Draft 1Documento7 páginasp2 Final Draft 1api-464093283Ainda não há avaliações
- Ethics For Robots: A Review of The 2017-2019 Literature: AbstractDocumento8 páginasEthics For Robots: A Review of The 2017-2019 Literature: Abstractapi-464093283Ainda não há avaliações
- Humanizing Self-Administered Surveys: Experiments On Social Presence in Web and IVR SurveysDocumento24 páginasHumanizing Self-Administered Surveys: Experiments On Social Presence in Web and IVR Surveysangeles_812013316Ainda não há avaliações
- Group ProjectDocumento25 páginasGroup ProjectDuy NgoAinda não há avaliações
- Toddlers Bond With RobotDocumento6 páginasToddlers Bond With Robotsukhwant1666Ainda não há avaliações
- Influnce PeopleDocumento6 páginasInflunce PeopleGanesh Kumar ArumugamAinda não há avaliações
- RRL1Documento6 páginasRRL1SANTILLAN GABRIELAinda não há avaliações
- Pretty Face Matters Relative Importance of The FacDocumento9 páginasPretty Face Matters Relative Importance of The FacXENICAinda não há avaliações
- JR Blok 15 - Atika & ShelmaDocumento27 páginasJR Blok 15 - Atika & ShelmaAudio TechnicaAinda não há avaliações
- Final DraftDocumento4 páginasFinal DraftBatuhan YıldırımAinda não há avaliações
- Final Report JohnsonDocumento11 páginasFinal Report Johnsonapi-283685004Ainda não há avaliações
- Advanced RoboticsDocumento10 páginasAdvanced RoboticsVlad PredaAinda não há avaliações
- Internet Sex Addiction - A New Distincs DisorderDocumento15 páginasInternet Sex Addiction - A New Distincs DisorderAdorján NémethAinda não há avaliações
- De Graaf Malle 2018 Robot Behaviors HRILBRDocumento3 páginasDe Graaf Malle 2018 Robot Behaviors HRILBRUpendra VaddeAinda não há avaliações
- Assistive Social Robots in Elderly Care: A ReviewDocumento10 páginasAssistive Social Robots in Elderly Care: A ReviewShane ConneelyAinda não há avaliações
- The Benefit of Being Physically Present A Survey of Experimental Works Comparing Copresent Robots, Telepresent Robots and Virtual AgentsDocumento15 páginasThe Benefit of Being Physically Present A Survey of Experimental Works Comparing Copresent Robots, Telepresent Robots and Virtual AgentsAbdul WahabAinda não há avaliações
- Logic of Consequence and Logic of AppropriatenessDocumento3 páginasLogic of Consequence and Logic of AppropriatenessMariefe JamonAinda não há avaliações
- Research ScriptDocumento3 páginasResearch ScriptDenisse AtienzaAinda não há avaliações
- Best 2nd VersionDocumento7 páginasBest 2nd VersionAmiraEsmatAinda não há avaliações
- tmpBEED TMPDocumento11 páginastmpBEED TMPFrontiersAinda não há avaliações
- The Tinder Stable Marriage Problem PDFDocumento13 páginasThe Tinder Stable Marriage Problem PDFmvlprasadAinda não há avaliações
- TR 2009 02Documento8 páginasTR 2009 02RichieDaisyAinda não há avaliações
- Broekens Heerink Rosendal 2009Documento11 páginasBroekens Heerink Rosendal 2009Ειρήνη ΔεμίρηAinda não há avaliações
- RoboticsDocumento23 páginasRoboticschotumotu131111Ainda não há avaliações
- Research Proposal FormateDocumento14 páginasResearch Proposal FormateFaisul FaryAinda não há avaliações
- Steelcord enDocumento2 páginasSteelcord enJulio Vega AngelesAinda não há avaliações
- Termpaper-Mechanical Vibration: Topic-Vibration of MembranesDocumento10 páginasTermpaper-Mechanical Vibration: Topic-Vibration of MembranesJulio Vega AngelesAinda não há avaliações
- Nickel Alloy TubesDocumento5 páginasNickel Alloy TubesJulio Vega AngelesAinda não há avaliações
- Silotop Zero en 0217 EditDocumento4 páginasSilotop Zero en 0217 EditJulio Vega AngelesAinda não há avaliações
- Robot Arm Without Using Robot Language and Its Application To Machining ProcessDocumento5 páginasRobot Arm Without Using Robot Language and Its Application To Machining ProcessJulio Vega AngelesAinda não há avaliações
- Uxm 30ln PW LidarDocumento2 páginasUxm 30ln PW LidarJulio Vega Angeles100% (1)
- Flyer Robot ES165D E 11.2012 05 PDFDocumento2 páginasFlyer Robot ES165D E 11.2012 05 PDFJulio Vega AngelesAinda não há avaliações
- Alesometros y Otros MitutoyoDocumento32 páginasAlesometros y Otros MitutoyoJulio Vega AngelesAinda não há avaliações
- Energy RV-K Foc PDFDocumento8 páginasEnergy RV-K Foc PDFJulio Vega AngelesAinda não há avaliações
- Ceosby GroupDocumento120 páginasCeosby GroupJulio Vega AngelesAinda não há avaliações
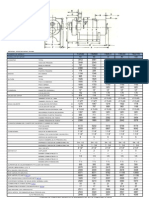
- Boiler Specifications 1Documento1 páginaBoiler Specifications 1Julio Vega AngelesAinda não há avaliações
- Vista School DistrictDocumento2 páginasVista School Districtapi-256469641Ainda não há avaliações
- RPH Bi Year 3 Module 2 (l17-l32)Documento26 páginasRPH Bi Year 3 Module 2 (l17-l32)Amirul100% (1)
- Assignment 1 - 2.1 2.2 2.3 2.4Documento16 páginasAssignment 1 - 2.1 2.2 2.3 2.4Narelle NeaveAinda não há avaliações
- KD21C Model Answer KeyDocumento2 páginasKD21C Model Answer KeymadhuAinda não há avaliações
- Taxonomies of Educational Objectives HANDOUTDocumento5 páginasTaxonomies of Educational Objectives HANDOUTBen LernerAinda não há avaliações
- Attendance Monitoring System and Information Dissemination With Sms Dissemination"Documento4 páginasAttendance Monitoring System and Information Dissemination With Sms Dissemination"Emmanuel Baccaray100% (1)
- How To Self-Assess For Maximum Impact Within An OrganizationDocumento21 páginasHow To Self-Assess For Maximum Impact Within An OrganizationOthniel EmejeAinda não há avaliações
- Master of Human Resource ManagementDocumento2 páginasMaster of Human Resource ManagementprincelamwkAinda não há avaliações
- Power and Privilege ModulesDocumento63 páginasPower and Privilege ModulesHallie Moberg BrauerAinda não há avaliações
- HNC RC Alan Slater, Ian Hocking, and Jon Loose - Theories and Issues in ChildDocumento30 páginasHNC RC Alan Slater, Ian Hocking, and Jon Loose - Theories and Issues in ChildDea Novianda GeovanniAinda não há avaliações
- Daily Lesson Log Organization Amp Management PDFDocumento4 páginasDaily Lesson Log Organization Amp Management PDFLem Rada100% (1)
- Translation and Style A Brief Introduction (Jean Boase-Beier)Documento4 páginasTranslation and Style A Brief Introduction (Jean Boase-Beier)zardhshAinda não há avaliações
- IntrovertsDocumento4 páginasIntrovertsTatiana MihaelaAinda não há avaliações
- WLL 5 Agreement of Subject VerbDocumento4 páginasWLL 5 Agreement of Subject VerbLorna TrinidadAinda não há avaliações
- Understanding The Concepts and Principles of Community ImmersionDocumento25 páginasUnderstanding The Concepts and Principles of Community ImmersionJohn TacordaJrAinda não há avaliações
- 9376 21056 1 SMDocumento12 páginas9376 21056 1 SMMauliza RusliAinda não há avaliações
- Lexical SemanticDocumento53 páginasLexical SemanticALJABARBIMBINGAN100% (2)
- Chat GPTDocumento23 páginasChat GPTMansi RajputAinda não há avaliações
- Semester 2 Week 5 PDFDocumento2 páginasSemester 2 Week 5 PDFjacquie_bymasterAinda não há avaliações
- Learning StyleDocumento11 páginasLearning Stylepermafrancis17Ainda não há avaliações
- Advantages and Disadvantage of CAIDocumento7 páginasAdvantages and Disadvantage of CAIInoOP chemAinda não há avaliações
- Notes in ACC116 P1Documento3 páginasNotes in ACC116 P1Shaina Laila OlpindoAinda não há avaliações
- Patient Health History TakingDocumento6 páginasPatient Health History Takingrose_roxasAinda não há avaliações
- Writing, Embodiment, Deferral: Merleau-Ponty and Derrida On: The Origin of GeometryDocumento22 páginasWriting, Embodiment, Deferral: Merleau-Ponty and Derrida On: The Origin of GeometrymaximumfishAinda não há avaliações
- Profed FinalDocumento45 páginasProfed FinalCherry CabadduAinda não há avaliações
- How To Start A Conversation With A Girl You LikeDocumento7 páginasHow To Start A Conversation With A Girl You LikeHeaven Hawkins100% (1)
- Collective ViolenceDocumento3 páginasCollective ViolenceagrawalsushmaAinda não há avaliações
- The Depression Anxiety Stress Scale (DASS) : DescriptionDocumento1 páginaThe Depression Anxiety Stress Scale (DASS) : DescriptionRiany Jade SabrinaAinda não há avaliações
- Lesson 2 - Common Myths of EntrepreneurshipDocumento15 páginasLesson 2 - Common Myths of EntrepreneurshipKim Ravanzo100% (1)
- Qualities of A CouncellorDocumento4 páginasQualities of A CouncellorSafi SweetAinda não há avaliações