Você também pode gostar
- Neural Networks:: Basics Using MATLABDocumento54 páginasNeural Networks:: Basics Using MATLABBob AssanAinda não há avaliações
- The Prediction of Sale Time Series by Artificial Neural NetworkDocumento4 páginasThe Prediction of Sale Time Series by Artificial Neural Networkbasualok@rediffmail.comAinda não há avaliações
- Maxbox Starter60 Machine LearningDocumento8 páginasMaxbox Starter60 Machine LearningMax KleinerAinda não há avaliações
- Documents - Ecet380 Ilab1 Key v1.1Documento15 páginasDocuments - Ecet380 Ilab1 Key v1.1Arnab NiloyAinda não há avaliações
- Artificial Neural Networks For BeginnersDocumento15 páginasArtificial Neural Networks For BeginnersAnonymous Ph4xtYLmKAinda não há avaliações
- DataCamp - TensorBoard TutorialDocumento31 páginasDataCamp - TensorBoard TutorialStig KalmoAinda não há avaliações
- System Model H (T) Inlet E (T) Outlet E H (T) System Model H (T) Inlet E (T) Outlet E H (T)Documento19 páginasSystem Model H (T) Inlet E (T) Outlet E H (T) System Model H (T) Inlet E (T) Outlet E H (T)WillykateKairuAinda não há avaliações
- Design Neural Network Predictive Controller in SimulinkDocumento9 páginasDesign Neural Network Predictive Controller in Simulinkrakheep123Ainda não há avaliações
- Neural Lab 1Documento5 páginasNeural Lab 1Bashar AsaadAinda não há avaliações
- Ex 8Documento15 páginasEx 8api-322416213Ainda não há avaliações
- AI Lab11 TaskDocumento21 páginasAI Lab11 TaskEngr Aftab AminAinda não há avaliações
- 0/1 Knapsack Algorithm Comparison: Jacek Dzikowski Illinois Institute of Technology E-Mail: Dzikjac@iit - EduDocumento15 páginas0/1 Knapsack Algorithm Comparison: Jacek Dzikowski Illinois Institute of Technology E-Mail: Dzikjac@iit - EduskimdadAinda não há avaliações
- Narx Model NN 0 MatlabDocumento8 páginasNarx Model NN 0 MatlabSn ProfAinda não há avaliações
- STAT 582: MATLAB Primer For Statistical AnalysisDocumento10 páginasSTAT 582: MATLAB Primer For Statistical AnalysisJoséAinda não há avaliações
- Testing and Debugging: Chapter GoalsDocumento28 páginasTesting and Debugging: Chapter GoalsAni AniAinda não há avaliações
- Final Project InstructionsDocumento2 páginasFinal Project InstructionsjuliusAinda não há avaliações
- Matlab Marina For Loops ExercisesDocumento4 páginasMatlab Marina For Loops ExercisesEman ArshadAinda não há avaliações
- Homework 1Documento2 páginasHomework 1Hendra LimAinda não há avaliações
- Neural Network Toolbox: A Tutorial For The Course Computational IntelligenceDocumento8 páginasNeural Network Toolbox: A Tutorial For The Course Computational Intelligencenehabatra14Ainda não há avaliações
- Using MATLAB To Solve Differential Equations NumericallyDocumento6 páginasUsing MATLAB To Solve Differential Equations NumericallyBrij Mohan SinghAinda não há avaliações
- ASNM Program ExplainDocumento4 páginasASNM Program ExplainKesehoAinda não há avaliações
- Instructions For Using High Order Moment EstimatorsDocumento4 páginasInstructions For Using High Order Moment EstimatorsthaidangvtAinda não há avaliações
- Chapter 10: Algorithms 10.1. Deterministic and Non-Deterministic AlgorithmDocumento5 páginasChapter 10: Algorithms 10.1. Deterministic and Non-Deterministic AlgorithmrowsunmahatoAinda não há avaliações
- Lab 6 - Learning System Identification Toolbox of Matlab PDFDocumento11 páginasLab 6 - Learning System Identification Toolbox of Matlab PDFAnonymous 2QXzLRAinda não há avaliações
- Lab 1Documento11 páginasLab 1Rigor RempilloAinda não há avaliações
- Machine Learning Lab Manual 7Documento8 páginasMachine Learning Lab Manual 7Raheel Aslam100% (1)
- Ex 3Documento12 páginasEx 3iqfzfbzqfzfqAinda não há avaliações
- Random Sample Consensus: Robust Estimation in Computer VisionNo EverandRandom Sample Consensus: Robust Estimation in Computer VisionAinda não há avaliações
- TP Master 2 SAR ATRDocumento4 páginasTP Master 2 SAR ATRKhaled LechhebAinda não há avaliações
- Define An Algorithm. What Are The Properties of An Algorithm? AnsDocumento9 páginasDefine An Algorithm. What Are The Properties of An Algorithm? AnsSiddhArth JAinAinda não há avaliações
- Name: Ahammad Nadendla Roll No: B19BB030Documento12 páginasName: Ahammad Nadendla Roll No: B19BB030Ankur BorkarAinda não há avaliações
- Exercise 4 "Linear System Identification Using Neural Networks" ObjectiveDocumento7 páginasExercise 4 "Linear System Identification Using Neural Networks" Objectiveberkanhzrc67Ainda não há avaliações
- Project 1 - ANN With BackpropDocumento3 páginasProject 1 - ANN With BackpropchytenAinda não há avaliações
- Introduction To Spectral Analysis and MatlabDocumento14 páginasIntroduction To Spectral Analysis and MatlabmmcAinda não há avaliações
- Earthquake PredictionDocumento20 páginasEarthquake PredictionGnrAinda não há avaliações
- 1.5 Empirical AnalysisDocumento8 páginas1.5 Empirical AnalysissaiAinda não há avaliações
- CS 461 - Fall 2021 - Neural Networks - Machine LearningDocumento5 páginasCS 461 - Fall 2021 - Neural Networks - Machine LearningVictor RutoAinda não há avaliações
- Lab1 1Documento10 páginasLab1 1Bogdan LupeAinda não há avaliações
- Week - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Documento7 páginasWeek - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Mrunal BhilareAinda não há avaliações
- ProjectReport KanwarpalDocumento17 páginasProjectReport KanwarpalKanwarpal SinghAinda não há avaliações
- SJBIT (Design and Analysis of Algorithm Lab Manual)Documento50 páginasSJBIT (Design and Analysis of Algorithm Lab Manual)Jayanth VasudevAinda não há avaliações
- System Verilog Interview Questions With AnswersDocumento10 páginasSystem Verilog Interview Questions With Answerspardeep184100% (1)
- Unit IIIDocumento28 páginasUnit IIIOmar FarooqueAinda não há avaliações
- Big Data Machine Learning Lab 4Documento7 páginasBig Data Machine Learning Lab 4fahim.samady2001Ainda não há avaliações
- Lecture 7 - Perceptrons and Multi-Layer Feedforward Neural Networks Using Matlab Part 3Documento6 páginasLecture 7 - Perceptrons and Multi-Layer Feedforward Neural Networks Using Matlab Part 3Ammar AlkindyAinda não há avaliações
- Fitting A Neural Network ModelDocumento9 páginasFitting A Neural Network ModelArpan KumarAinda não há avaliações
- Support Vector Machines: The Interface To Libsvm in Package E1071 by David Meyer FH Technikum Wien, AustriaDocumento8 páginasSupport Vector Machines: The Interface To Libsvm in Package E1071 by David Meyer FH Technikum Wien, AustriaDoom Head 47Ainda não há avaliações
- ClusteringDocumento17 páginasClusteringRiad El AbedAinda não há avaliações
- Soft Lab - Iii Ec506Documento34 páginasSoft Lab - Iii Ec506Akanksha DixitAinda não há avaliações
- A Semiconductor Device Simulator Utilizing MATLAB: Fardi, Hamid Shawn PaceDocumento10 páginasA Semiconductor Device Simulator Utilizing MATLAB: Fardi, Hamid Shawn PaceGurinder Pal SinghAinda não há avaliações
- A Novel Genetic Algorithm For Static Task Scheduling in Distributed SystemsDocumento6 páginasA Novel Genetic Algorithm For Static Task Scheduling in Distributed SystemsVijaya LakshmiAinda não há avaliações
- ML Final Project ReportDocumento8 páginasML Final Project ReportAditya GuptaAinda não há avaliações
- Matlab Primer 7 Dec 09Documento170 páginasMatlab Primer 7 Dec 09Cindy FengAinda não há avaliações
- Test 1 Week 5Documento3 páginasTest 1 Week 5Cristian CabelloAinda não há avaliações
- Chapter One1 Data Structure and AlgorithmsDocumento14 páginasChapter One1 Data Structure and AlgorithmsHildana TamratAinda não há avaliações
- Input Window Size and Neural Network Predictors: XT D FXTXT XT N XT D F T T XDocumento8 páginasInput Window Size and Neural Network Predictors: XT D FXTXT XT N XT D F T T Xtamas_orban4546Ainda não há avaliações
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningAinda não há avaliações
- Cyberbullying BrochureDocumento2 páginasCyberbullying Brochureapi-614083099Ainda não há avaliações
- Capstone ProjectDocumento29 páginasCapstone ProjectPrashant A UAinda não há avaliações
- Letter of MotivationDocumento1 páginaLetter of Motivationhafiz muhammad zubair hafiz muhammad zubairAinda não há avaliações
- Important Instructions For Filling Ach Mandate Form: HdfcbankltdDocumento1 páginaImportant Instructions For Filling Ach Mandate Form: HdfcbankltdFUTURE NEXTTIMEAinda não há avaliações
- Amplify Alarms, Wakelocks and ServicesDocumento40 páginasAmplify Alarms, Wakelocks and Servicesdejvi123100% (1)
- 25KW High Frequency Mobile DR System YJ-X5200ADocumento5 páginas25KW High Frequency Mobile DR System YJ-X5200Ajcdavidm2000Ainda não há avaliações
- Hololens - Presentation With VideoDocumento23 páginasHololens - Presentation With VideoAkshit GuptaAinda não há avaliações
- An Is Perspective of Mergers and AcquisitionsDocumento54 páginasAn Is Perspective of Mergers and AcquisitionsSonia BenitoAinda não há avaliações
- USACE Schedule SpecsDocumento14 páginasUSACE Schedule SpecsAmgad FahmyAinda não há avaliações
- AmpliTube X-GEAR User ManualDocumento84 páginasAmpliTube X-GEAR User ManualToriano LampkinAinda não há avaliações
- Remote Access PolicyDocumento4 páginasRemote Access Policysolobreak05Ainda não há avaliações
- Optimization: 1 MotivationDocumento20 páginasOptimization: 1 MotivationSCRBDusernmAinda não há avaliações
- Lec 5Documento23 páginasLec 5Sama Atif Abdel-LatifAinda não há avaliações
- Native InstallDocumento64 páginasNative InstallSanthosh KrishnanAinda não há avaliações
- Anaya BachilleratoDocumento24 páginasAnaya Bachilleratogabriel simunovic0% (5)
- Mid PDFDocumento99 páginasMid PDFKIt ChanAinda não há avaliações
- Template TutorialDocumento3 páginasTemplate Tutorialcomicguy68100% (1)
- SAP B1 General Settings For Ivend RetailDocumento12 páginasSAP B1 General Settings For Ivend RetailVarun SirohiAinda não há avaliações
- Computer Grade 7 Software ReviewDocumento46 páginasComputer Grade 7 Software Reviewjeromee mendozaAinda não há avaliações
- SLR140 - ArDocumento51 páginasSLR140 - ArDeepak Ojha100% (1)
- AT-07338-BRO-Aspen GDOT brochure-OLEFINS-2021-1112Documento7 páginasAT-07338-BRO-Aspen GDOT brochure-OLEFINS-2021-1112Zeeshan AlamAinda não há avaliações
- Instructor Materials Chapter 3: Computer Assembly: IT Essentials v6.0Documento28 páginasInstructor Materials Chapter 3: Computer Assembly: IT Essentials v6.0opsssAinda não há avaliações
- FreeFEM DocumentationDocumento746 páginasFreeFEM DocumentationcordobeehAinda não há avaliações
- Course OutlineDocumento13 páginasCourse OutlineRaffAinda não há avaliações
- Pandit Deendayal Energy University School of Technology: 21BCP430D Pranjal M. PatelDocumento42 páginasPandit Deendayal Energy University School of Technology: 21BCP430D Pranjal M. PatelDevasya PatelAinda não há avaliações
- Interview Qs On r12 p2pDocumento15 páginasInterview Qs On r12 p2pAmitPradhanAinda não há avaliações
- Modern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012Documento3 páginasModern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012srini_792002Ainda não há avaliações
- Robba StuffDocumento16 páginasRobba StuffKoop Da Ville100% (1)
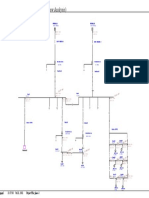
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVDocumento1 páginaOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderAinda não há avaliações
- JSON and XML EditorDocumento3 páginasJSON and XML EditorAmira JilaliAinda não há avaliações