Você também pode gostar
- Resultado Examen FinalDocumento1 páginaResultado Examen FinalGustavo Joaquin Cantillo RebolledoAinda não há avaliações
- Capítulo 2 Respuestas CCNA2Documento7 páginasCapítulo 2 Respuestas CCNA2Gustavo Joaquin Cantillo RebolledoAinda não há avaliações
- Capitulo 1 Respuestas CCNA 2Documento6 páginasCapitulo 1 Respuestas CCNA 2Gustavo Joaquin Cantillo RebolledoAinda não há avaliações
- Examen CCNA 1 Capitulo 6Documento7 páginasExamen CCNA 1 Capitulo 6Gustavo Joaquin Cantillo Rebolledo0% (1)
- Irwin HincapieDocumento5 páginasIrwin HincapieGustavo Joaquin Cantillo RebolledoAinda não há avaliações
- Actividad Practica Momento2Documento9 páginasActividad Practica Momento2Gustavo Joaquin Cantillo RebolledoAinda não há avaliações
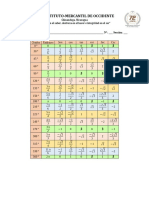
- Tabla de Valores de Ángulos Especiales - CompletaDocumento1 páginaTabla de Valores de Ángulos Especiales - CompletaCristopher Alexander Alegría RomeroAinda não há avaliações
- Turbo. Tema3 Flujo en CascadaDocumento44 páginasTurbo. Tema3 Flujo en CascadaCdMoraSAinda não há avaliações
- Ing. ProyectoDocumento13 páginasIng. ProyectoLa Rotonda LicoreriaAinda não há avaliações
- Empezaremos Este Tema de La Rama de La Física Llamada Mecánica Con Las Leyes de La Mecanica Postuladas Por Sir Isaac NewtonDocumento73 páginasEmpezaremos Este Tema de La Rama de La Física Llamada Mecánica Con Las Leyes de La Mecanica Postuladas Por Sir Isaac NewtonCéskar OrtizAinda não há avaliações
- Sistema DiedricoDocumento16 páginasSistema DiedricoPedro B.Ainda não há avaliações
- Clasificación de Los Perfiles de FlujoDocumento9 páginasClasificación de Los Perfiles de Flujocesaralfa01Ainda não há avaliações
- 08-Torres y Condensadores 2019Documento30 páginas08-Torres y Condensadores 2019Rodrigo Civetta MartinezAinda não há avaliações
- Anexo ADocumento5 páginasAnexo ADante Alexander OteroAinda não há avaliações
- Sustentacion Trabajo Colaborativo - Escenario 7 - Segundo Bloque-Ciencias Basicas - Virtual - Matemáticas - (Grupo A06)Documento5 páginasSustentacion Trabajo Colaborativo - Escenario 7 - Segundo Bloque-Ciencias Basicas - Virtual - Matemáticas - (Grupo A06)Alejandra González CastroAinda não há avaliações
- Planificacion Anual 9 Ingles 2010Documento10 páginasPlanificacion Anual 9 Ingles 2010Celeste Alvarez Fernandez Fernandez100% (1)
- Teorias MatematicasDocumento14 páginasTeorias MatematicasMilagros PozzoAinda não há avaliações
- Practica 1Documento2 páginasPractica 1Emilio Daniel Villalba LozanoAinda não há avaliações
- TEMA 10 OrtofotogrametriaDocumento29 páginasTEMA 10 OrtofotogrametriappantorrillaAinda não há avaliações
- Mat1-U5-Sesión 03-12 2017Documento10 páginasMat1-U5-Sesión 03-12 2017Oscar Jesús Piñas VivasAinda não há avaliações
- Semana 13Sesión38.AplicacionesDocumento30 páginasSemana 13Sesión38.AplicacionesFernando Alonso Mendoza GuevaraAinda não há avaliações
- Criterios de Divisibilidad, Fracciones Etc...Documento26 páginasCriterios de Divisibilidad, Fracciones Etc...M Angeles Fernandez Rivera100% (1)
- Tema 2 Tablas de Distribucion de Frecuencia (Una Dos o Multiples EntradasDocumento27 páginasTema 2 Tablas de Distribucion de Frecuencia (Una Dos o Multiples EntradasClau GAinda não há avaliações
- Horario 3° A - 2023Documento1 páginaHorario 3° A - 2023Jean Piero GuerraAinda não há avaliações
- Pauta Guia de Ejercicios 5 - 022020Documento11 páginasPauta Guia de Ejercicios 5 - 022020Jose Luis Faundez PinoAinda não há avaliações
- 1 Basico 2017Documento3 páginas1 Basico 2017odalyAinda não há avaliações
- Potenciación RadicaciónDocumento4 páginasPotenciación Radicaciónabraham arevaloAinda não há avaliações
- DHP IDocumento5 páginasDHP ICarolina MedinaAinda não há avaliações
- 1.trabajo - Red de Tuberías de GasDocumento13 páginas1.trabajo - Red de Tuberías de GasJesus BolivarAinda não há avaliações
- 11 Semana - VIGAS DiagramasDocumento11 páginas11 Semana - VIGAS DiagramasGesslerLyndonMedranoSanchezAinda não há avaliações
- EJERC Manual NetbeansDocumento758 páginasEJERC Manual NetbeansNeicer Campos VásquezAinda não há avaliações
- Unidad 2 Inventarios - Demanda Dependiente MRP PDFDocumento34 páginasUnidad 2 Inventarios - Demanda Dependiente MRP PDFLaura Daniela CardonaAinda não há avaliações
- El Plano RealDocumento41 páginasEl Plano Realhuilbrt61% (18)
- Trabajo - Practica - Docente IDocumento15 páginasTrabajo - Practica - Docente IHilder Lozada VasquezAinda não há avaliações
- Med2 U3 A2 V1 FeacDocumento3 páginasMed2 U3 A2 V1 FeacKarina Jimenez100% (1)
- Experiencia 1 Teoria de ErroresDocumento37 páginasExperiencia 1 Teoria de ErroresRenzo LuisAinda não há avaliações