Você também pode gostar
- Manual de Programacion OkumaDocumento93 páginasManual de Programacion OkumaEduardo Luevano100% (7)
- Parcial - Escenario 4 - GESTION DE LA INFORMACION - (GRUPO3)Documento10 páginasParcial - Escenario 4 - GESTION DE LA INFORMACION - (GRUPO3)Diana Torres100% (1)
- Iso 17025 PDFDocumento8 páginasIso 17025 PDFKriss Ramirez ZAinda não há avaliações
- Planta de Aguas ResidualesDocumento174 páginasPlanta de Aguas ResidualesDaniel CernaAinda não há avaliações
- Ejercicios de Estabilidad en El Tiempo DiscretoDocumento2 páginasEjercicios de Estabilidad en El Tiempo DiscretoDaniel Cerna0% (2)
- Exa Rec CD050713 PDFDocumento3 páginasExa Rec CD050713 PDFDaniel CernaAinda não há avaliações
- Aparato DigestivoDocumento38 páginasAparato DigestivoDaniel CernaAinda não há avaliações
- Tarea 01Documento17 páginasTarea 01Daniel CernaAinda não há avaliações
- Redes II - Invt 01Documento6 páginasRedes II - Invt 01Daniel CernaAinda não há avaliações
- Exfo Webinar Mejores Practicas para La Activacion de Redes WDM 85539Documento55 páginasExfo Webinar Mejores Practicas para La Activacion de Redes WDM 85539Federico Zerpa NassarAinda não há avaliações
- Redes I - Protocolos de Capa de RedDocumento27 páginasRedes I - Protocolos de Capa de RedDaniel CernaAinda não há avaliações
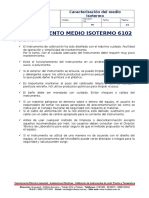
- Mantenimiento 6102 FLUKEDocumento1 páginaMantenimiento 6102 FLUKEDaniel CernaAinda não há avaliações
- Homologacion GSM Radio Bases TANDDDocumento2 páginasHomologacion GSM Radio Bases TANDDDaniel CernaAinda não há avaliações
- La Transformada ZDocumento33 páginasLa Transformada ZIsmael FarfánAinda não há avaliações
- Z TransformDocumento55 páginasZ TransformEfrain Fredy Poma JimenezAinda não há avaliações
- Tarea Efecto FotoelectricoDocumento1 páginaTarea Efecto FotoelectricoDaniel CernaAinda não há avaliações
- Matriz Transición Tiempo ContinuoDocumento12 páginasMatriz Transición Tiempo ContinuoJonas YlaballenaAinda não há avaliações
- Repaso-Transformada Laplace PDFDocumento58 páginasRepaso-Transformada Laplace PDFDaniel CernaAinda não há avaliações
- Transporte-SCM 2012Documento32 páginasTransporte-SCM 2012Daniel CernaAinda não há avaliações
- Numreal 25 AbrilDocumento28 páginasNumreal 25 AbrilMAinda não há avaliações
- Editoriales1 Bach MatematicasDocumento140 páginasEditoriales1 Bach MatematicasAna SolaAinda não há avaliações
- Matriz IPERC - Tarea 3Documento18 páginasMatriz IPERC - Tarea 3Juan Carlos AvilaAinda não há avaliações
- Catalogo Orfeo v-1.4Documento2 páginasCatalogo Orfeo v-1.4marin4Ainda não há avaliações
- Dialnet DesarrolloYAprendizajeDelConocimientoEspacial 1317473Documento33 páginasDialnet DesarrolloYAprendizajeDelConocimientoEspacial 1317473gsolaresAinda não há avaliações
- ElipsisDocumento3 páginasElipsisBerardo LeoncioAinda não há avaliações
- Capitulo 3Documento4 páginasCapitulo 3Erubey Correa BarajasAinda não há avaliações
- Mo Üdulo 2 Tu Huella DigitalDocumento24 páginasMo Üdulo 2 Tu Huella DigitaljimmoxAinda não há avaliações
- Matriz Análisis de RiesgosDocumento62 páginasMatriz Análisis de RiesgosSlayer KingAinda não há avaliações
- Apuntes Del Curso Profesional de Freecad de Rafael García RodriguezDocumento16 páginasApuntes Del Curso Profesional de Freecad de Rafael García RodriguezISRAEL AMADORAinda não há avaliações
- Críticas Al Paradigma de La Complejidad de Edgar Morin PDFDocumento18 páginasCríticas Al Paradigma de La Complejidad de Edgar Morin PDFfvaladez14Ainda não há avaliações
- 12 Hubbell Carlos BuznegoDocumento33 páginas12 Hubbell Carlos BuznegoCarlos Buznego NiochetAinda não há avaliações
- FORMULARIODocumento4 páginasFORMULARIOLuis RubianoAinda não há avaliações
- Qual2kw5 UsermanualDocumento49 páginasQual2kw5 UsermanualStphannie Carolina Caviedes NumaAinda não há avaliações
- Exposicion Forecast PDFDocumento17 páginasExposicion Forecast PDFBrandon HookerAinda não há avaliações
- PRACTICAS LAB. ING EyE AGO 2020 PDFDocumento112 páginasPRACTICAS LAB. ING EyE AGO 2020 PDFErixel JijonAinda não há avaliações
- Integrales MultiplesDocumento8 páginasIntegrales MultiplesEdu Paxi TiconaAinda não há avaliações
- DA 7250 EspecificacionesDocumento8 páginasDA 7250 EspecificacionesjesusquispeAinda não há avaliações
- Extracto JUL SEP-21Documento2 páginasExtracto JUL SEP-21Yesenia CharryAinda não há avaliações
- Windows Forms C#Documento13 páginasWindows Forms C#Anthony Nava AguilarAinda não há avaliações
- Layout Interprete CFDI 40Documento10 páginasLayout Interprete CFDI 40Leonardo figueroaAinda não há avaliações
- Actividad 11.5.1: Configuración Básica de Dispositivo de CiscoDocumento8 páginasActividad 11.5.1: Configuración Básica de Dispositivo de Ciscopromaster681Ainda não há avaliações
- MyS - Plan SelectDocumento2 páginasMyS - Plan SelectJaime SandovalAinda não há avaliações
- Modelos de Línea de EsperaDocumento7 páginasModelos de Línea de EsperaJuliana HerreraAinda não há avaliações
- Cert. Ecopetrol PracticasDocumento1 páginaCert. Ecopetrol PracticasGUILLERMO ARDILA PARDO100% (1)
- M076 Ud05 Sev2Documento6 páginasM076 Ud05 Sev2svelamondoAinda não há avaliações
- Guia Packet TracerDocumento21 páginasGuia Packet TracerHector Alejandro Velasco BeltranAinda não há avaliações
- Diseño de Un Sistema de Gestion de Procesos para El Area de Embotellado de Cerveceria Nacional C N Planta QuitoDocumento128 páginasDiseño de Un Sistema de Gestion de Procesos para El Area de Embotellado de Cerveceria Nacional C N Planta QuitoJaime VargasAinda não há avaliações
- Bigdata: Bloque 1 - Sesión 5Documento3 páginasBigdata: Bloque 1 - Sesión 5JAinda não há avaliações