Você também pode gostar
- Unit-1 2019Documento261 páginasUnit-1 2019Mr. S. Paul JoshuaAinda não há avaliações
- Unit - I - Introduction To Cad/CamDocumento73 páginasUnit - I - Introduction To Cad/CamPrakhar JainAinda não há avaliações
- ME 1356 CAD/CAM Lab Manual: Your Guide to Computer-Aided DesignDocumento42 páginasME 1356 CAD/CAM Lab Manual: Your Guide to Computer-Aided Designsimalaravi0% (1)
- 1.1 Fundamentals of CADDocumento41 páginas1.1 Fundamentals of CADSandeepakAinda não há avaliações
- Cad Cam 12Documento72 páginasCad Cam 12Prakhar JainAinda não há avaliações
- Cad-Cam Manual PDFDocumento34 páginasCad-Cam Manual PDFM.Saravana Kumar..M.E100% (2)
- Design For Manufacture: CAD CAM CAE Transportability CIM Need of CIMDocumento50 páginasDesign For Manufacture: CAD CAM CAE Transportability CIM Need of CIMHmwDyAinda não há avaliações
- Design For Manufacture: CAD CAM CAE Transportability CIM Need of CIMDocumento50 páginasDesign For Manufacture: CAD CAM CAE Transportability CIM Need of CIMعبدالرحمن سليمانAinda não há avaliações
- Introduction To CadDocumento13 páginasIntroduction To Cadakshay_pundeAinda não há avaliações
- CAD/CAM IntroductionDocumento92 páginasCAD/CAM IntroductionSurya BhupathirajuAinda não há avaliações
- Unit 2 AIM NotesDocumento33 páginasUnit 2 AIM NotesVikash PrajapatiAinda não há avaliações
- CADM Mod 2Documento39 páginasCADM Mod 2Aswin MAinda não há avaliações
- Sub-Module 1.1 - Introduction of Computer Graphics - Theory Assignment SolutionsDocumento4 páginasSub-Module 1.1 - Introduction of Computer Graphics - Theory Assignment SolutionsNeeraj GuptaAinda não há avaliações
- Unit 3Documento280 páginasUnit 3Kamalakkannan KrishnanAinda não há avaliações
- Cad/Cam: Chapter TwoDocumento172 páginasCad/Cam: Chapter TwoMoathAinda não há avaliações
- Cadsystems - PPT: Computer-Aided DesignDocumento8 páginasCadsystems - PPT: Computer-Aided DesignMichael DineshAinda não há avaliações
- Moi University School of Information Science Dit 010: Management Information System Section A Question OneDocumento7 páginasMoi University School of Information Science Dit 010: Management Information System Section A Question OneKiprotich KibetAinda não há avaliações
- CAD System Design Process and AnalysisDocumento64 páginasCAD System Design Process and AnalysiskoalaboiAinda não há avaliações
- Cad Cam CaeDocumento25 páginasCad Cam Caesadananda_pvc100% (1)
- Unit I: 3D Modeling & Viewing (08 HRS)Documento26 páginasUnit I: 3D Modeling & Viewing (08 HRS)vishwajeet patilAinda não há avaliações
- Cad Cam Technology 8725 OKSxhtPDocumento17 páginasCad Cam Technology 8725 OKSxhtPshivu bnAinda não há avaliações
- Introduction to CAD FundamentalsDocumento11 páginasIntroduction to CAD FundamentalsMansi SikarwarAinda não há avaliações
- Computer Aided Design and AnalysisDocumento25 páginasComputer Aided Design and AnalysisOyedotun TundeAinda não há avaliações
- Unit - 1: Question: Explain The Design Process With Computer and Without ComputerDocumento17 páginasUnit - 1: Question: Explain The Design Process With Computer and Without Computerbrar352Ainda não há avaliações
- C A D M: Omputer Ided Esign and AnufacturingDocumento6 páginasC A D M: Omputer Ided Esign and AnufacturingMenna TantawiAinda não há avaliações
- Introduction To CAD: Svcaet&Rs, Fae, Igkv, Raipur (C.G.)Documento20 páginasIntroduction To CAD: Svcaet&Rs, Fae, Igkv, Raipur (C.G.)Jai JoshiAinda não há avaliações
- Introduction to CAD Software and ModelsDocumento14 páginasIntroduction to CAD Software and ModelsthirumalaikumaranAinda não há avaliações
- Cad CamDocumento6 páginasCad CamKuldeep SinghAinda não há avaliações
- Visual Graphic Design - VGD4: Computer Aided Design (CAD)Documento14 páginasVisual Graphic Design - VGD4: Computer Aided Design (CAD)JD SalviejoAinda não há avaliações
- Cad Notes in Word1Documento71 páginasCad Notes in Word1arunAinda não há avaliações
- MEC435 Chapter1 v1.1 PDFDocumento47 páginasMEC435 Chapter1 v1.1 PDFSyed AzzizAinda não há avaliações
- Experiment No. 1: AIM: To Study About CAD, CAM and CAE Software and Its AdvantagesDocumento8 páginasExperiment No. 1: AIM: To Study About CAD, CAM and CAE Software and Its AdvantagessuryavigneAinda não há avaliações
- Overview of CAD SoftwareDocumento4 páginasOverview of CAD SoftwareLakshika SubodhaniAinda não há avaliações
- Mf7111 Cam Lab Manual Edited - 2014Documento34 páginasMf7111 Cam Lab Manual Edited - 2014Nabeel neduvalliAinda não há avaliações
- Introduction to CADDocumento138 páginasIntroduction to CADKuldeep ShrivastavaAinda não há avaliações
- Unit-1 - CAD - V02Documento21 páginasUnit-1 - CAD - V02muthupuviAinda não há avaliações
- Technological University of The Philippines Ayala Blvd. Ermita, Manila College of EngineeringDocumento19 páginasTechnological University of The Philippines Ayala Blvd. Ermita, Manila College of EngineeringKraciana Celestina SantosAinda não há avaliações
- MEM201 L2-Fa0809-CAD-Drawings - RC PDFDocumento15 páginasMEM201 L2-Fa0809-CAD-Drawings - RC PDFIsrael AlvarezAinda não há avaliações
- Cad BookDocumento86 páginasCad BookGopi RaguAinda não há avaliações
- Product Design and CadcamDocumento22 páginasProduct Design and CadcamShaukat Ali ShahAinda não há avaliações
- Computer Aided DesignDocumento7 páginasComputer Aided DesignRicardo AqpAinda não há avaliações
- Computer Aided Design (CAD) : DR Janardhan VDocumento206 páginasComputer Aided Design (CAD) : DR Janardhan Vk pAinda não há avaliações
- Lecture - 5 - Computer Aided Drawing - B.SC (Agricultural Engineering) - Morg - ADocumento19 páginasLecture - 5 - Computer Aided Drawing - B.SC (Agricultural Engineering) - Morg - AAbdullahAinda não há avaliações
- Cad Cam Lab ManualDocumento75 páginasCad Cam Lab ManualHariprasad100% (1)
- Chapter 1Documento7 páginasChapter 1Filiz ÖztürkAinda não há avaliações
- Cadd For CivilDocumento14 páginasCadd For CivilIbikunle AkinolaAinda não há avaliações
- 3D Cad - An Emergent Tool For Concept DesignDocumento4 páginas3D Cad - An Emergent Tool For Concept DesignAdvanced Research PublicationsAinda não há avaliações
- CadDocumento8 páginasCadLuck VelascoAinda não há avaliações
- Unit 4- PDD NotesDocumento32 páginasUnit 4- PDD NotesJatin SuryawanshiAinda não há avaliações
- Module 1Documento7 páginasModule 1Ankit SahAinda não há avaliações
- Chapter 1Documento56 páginasChapter 1om navadiyaAinda não há avaliações
- Practical No. 01: Objective: - Study The Basics of CAD/CAMDocumento4 páginasPractical No. 01: Objective: - Study The Basics of CAD/CAMapi-26046805Ainda não há avaliações
- Term Paper of Mechanical SciencesDocumento12 páginasTerm Paper of Mechanical SciencesamitmaheshpurAinda não há avaliações
- Computer Aided Drawing and Design NotesrDocumento16 páginasComputer Aided Drawing and Design NotesrMue ngineerAinda não há avaliações
- Cad Module 1Documento126 páginasCad Module 1iampiyushsahuAinda não há avaliações
- To Understand The Fundamental Concepts On Which The CAD/CAM Systems Are Built Users Become Very EfficientDocumento189 páginasTo Understand The Fundamental Concepts On Which The CAD/CAM Systems Are Built Users Become Very EfficientSakthiAinda não há avaliações
- Cad Cam - Module 1Documento85 páginasCad Cam - Module 1sibaprasad.behera2020Ainda não há avaliações
- Modeling and Problem Solving Techniques for EngineersNo EverandModeling and Problem Solving Techniques for EngineersAinda não há avaliações
- Up and Running with AutoCAD 2012: 2D and 3D Drawing and ModelingNo EverandUp and Running with AutoCAD 2012: 2D and 3D Drawing and ModelingNota: 5 de 5 estrelas5/5 (1)
- 2D Steady Convection - Numerical Results - SimCafe - DashboardDocumento10 páginas2D Steady Convection - Numerical Results - SimCafe - DashboardShri Vignesh KAinda não há avaliações
- 2D Steady Convection - Physics Setup - SimCafe - DashboardDocumento4 páginas2D Steady Convection - Physics Setup - SimCafe - DashboardShri Vignesh KAinda não há avaliações
- ANSYS FLUENT 2D Steady Convection Numerical Solution GuideDocumento3 páginasANSYS FLUENT 2D Steady Convection Numerical Solution GuideShri Vignesh KAinda não há avaliações
- Small Solar MED Seawater PDFDocumento14 páginasSmall Solar MED Seawater PDFShri Vignesh KAinda não há avaliações
- Industrial Management NotesDocumento7 páginasIndustrial Management NotesShri Vignesh KAinda não há avaliações
- 2D Steady Convection - Mesh - SimCafe - DashboardDocumento8 páginas2D Steady Convection - Mesh - SimCafe - DashboardShri Vignesh KAinda não há avaliações
- Bifurcating Artery - Physics Setup - SimCafe - DashboardDocumento1 páginaBifurcating Artery - Physics Setup - SimCafe - DashboardShri Vignesh KAinda não há avaliações
- International Communications in Heat and Mass Transfer: Usman Salahuddin, Muhammad Bilal, Haider EjazDocumento5 páginasInternational Communications in Heat and Mass Transfer: Usman Salahuddin, Muhammad Bilal, Haider EjazShri Vignesh KAinda não há avaliações
- FLUENT - Bifurcating Artery - SimCafe - DashboardDocumento3 páginasFLUENT - Bifurcating Artery - SimCafe - DashboardShri Vignesh KAinda não há avaliações
- Industrial Management Notes PDFDocumento301 páginasIndustrial Management Notes PDFsimhav198773% (33)
- Introduction To Material HandlingDocumento244 páginasIntroduction To Material HandlingAreda100% (3)
- Presentation On: Supplier Evaluation and SelectionDocumento38 páginasPresentation On: Supplier Evaluation and SelectionShri Vignesh KAinda não há avaliações
- ANSYS Fluent Text Command List PDFDocumento128 páginasANSYS Fluent Text Command List PDFShri Vignesh KAinda não há avaliações
- Introduction To Using ANSYS FLUENT in ANSYS Workbench Fluid FlowDocumento75 páginasIntroduction To Using ANSYS FLUENT in ANSYS Workbench Fluid FlowkrodyAinda não há avaliações
- Industrial Engineering PDFDocumento44 páginasIndustrial Engineering PDFAmar PatnaikAinda não há avaliações
- Heat Transfer in Nanofluids-A ReviewDocumento18 páginasHeat Transfer in Nanofluids-A ReviewShri Vignesh KAinda não há avaliações
- An Introduction To Digital Image Processing With Matlab Notes For SCM2511 Image ProcessingDocumento264 páginasAn Introduction To Digital Image Processing With Matlab Notes For SCM2511 Image ProcessingPedro PedAinda não há avaliações
- 1383 - M.tech - ThermalDocumento14 páginas1383 - M.tech - ThermalShri Vignesh KAinda não há avaliações
- Color Lecture Part 1Documento61 páginasColor Lecture Part 1api-270388254Ainda não há avaliações
- 2nd Quarter Summative Test MIL 2022Documento6 páginas2nd Quarter Summative Test MIL 2022rufino delacruzAinda não há avaliações
- Quiz DIPDocumento7 páginasQuiz DIPayesha bashirAinda não há avaliações
- Development of Detection Maturity Method in Carrot Varieties Cipanas Using - Wiliandi Saputro and Irsyad Faisal MutaqiDocumento6 páginasDevelopment of Detection Maturity Method in Carrot Varieties Cipanas Using - Wiliandi Saputro and Irsyad Faisal MutaqiWiliandi SaputroAinda não há avaliações
- ChaosPro Release 4Documento169 páginasChaosPro Release 4Aahs SvcsAinda não há avaliações
- Understanding Color Models and Their RelationshipsDocumento20 páginasUnderstanding Color Models and Their RelationshipssharmilaAinda não há avaliações
- Color in Cartographic Design 8Documento11 páginasColor in Cartographic Design 8Jovial O'BrianAinda não há avaliações
- Shade Selection in Fixed ProsthodonticsDocumento8 páginasShade Selection in Fixed Prosthodonticsprofadel profadel100% (1)
- Semester Project ThesisDocumento5 páginasSemester Project ThesisUsama FaizAinda não há avaliações
- CS2401 Computer Graphics Two Marks QuestionsDocumento12 páginasCS2401 Computer Graphics Two Marks QuestionsArul Prakash50% (2)
- CS6513-COMPUTER GRAPHICS LABORATORY-664424542-computer Graphics Lab Manual 2013 RegulationDocumento77 páginasCS6513-COMPUTER GRAPHICS LABORATORY-664424542-computer Graphics Lab Manual 2013 RegulationGanesh100% (1)
- Digital Image Processing Question & AnswersDocumento13 páginasDigital Image Processing Question & AnswershemavathyrajasekaranAinda não há avaliações
- Medical Image Processing (UBM1601) Unit - I Fundamentals of Medical Image Processing and TransformsDocumento55 páginasMedical Image Processing (UBM1601) Unit - I Fundamentals of Medical Image Processing and TransformsAnj AnandAinda não há avaliações
- Color Models Explained with RGB, CMY, HSI (less than 40 chars: 38 charsDocumento11 páginasColor Models Explained with RGB, CMY, HSI (less than 40 chars: 38 charsSushant SawantAinda não há avaliações
- Image AnalyticsDocumento93 páginasImage AnalyticsSudha MadhuriAinda não há avaliações
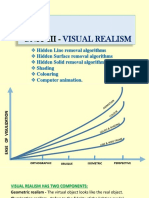
- Chapter 9 Visual RealismDocumento18 páginasChapter 9 Visual RealismS RAJESHAinda não há avaliações
- Introduction To GeoMedia PDFDocumento26 páginasIntroduction To GeoMedia PDFSapunaru AdrianAinda não há avaliações
- Color Theory For PhotographersDocumento57 páginasColor Theory For PhotographersBonsrahAinda não há avaliações
- Visual RealismDocumento131 páginasVisual RealismSabareeswaran MurugesanAinda não há avaliações
- Color Sensors and Their Applications Based On RealDocumento16 páginasColor Sensors and Their Applications Based On RealHareesh PanakkalAinda não há avaliações
- Face Detection Techniques A Review PDFDocumento22 páginasFace Detection Techniques A Review PDFRachmad HidayatAinda não há avaliações
- MCQ For DIPDocumento54 páginasMCQ For DIPVishal Gewali73% (41)
- Kolor MenadzmentDocumento91 páginasKolor Menadzmentclaudiobravo112Ainda não há avaliações
- ModelOff Round 1 - Question Breakdown and Style GuideDocumento3 páginasModelOff Round 1 - Question Breakdown and Style GuideGabriel Jiabei GaoAinda não há avaliações
- IP UT 1 NotesDocumento19 páginasIP UT 1 NotesKartik SomaniAinda não há avaliações
- Color Detection and Mixing SystemDocumento3 páginasColor Detection and Mixing SystemATSAinda não há avaliações
- Opencv Python TutorialDocumento88 páginasOpencv Python TutorialParéto BessanhAinda não há avaliações
- Unit Iii Me16501 PDFDocumento163 páginasUnit Iii Me16501 PDFSelva BabuAinda não há avaliações
- ComputerGraphics CS2401 Units 3 4 5 QuestionBankDocumento3 páginasComputerGraphics CS2401 Units 3 4 5 QuestionBankBhaskar PadmanabhanAinda não há avaliações
- Thermefix 338 Continuous Dyeing RangeDocumento48 páginasThermefix 338 Continuous Dyeing RangeImran Malik100% (1)