Você também pode gostar
- Lectut CEN 105 Doc CEN 105 PracticeQuestions (Module3&4) VfxP14sDocumento2 páginasLectut CEN 105 Doc CEN 105 PracticeQuestions (Module3&4) VfxP14sshivam12365Ainda não há avaliações
- Re-Examination Form - 2016: Indian Institute of Technology Roorkee, Roorkee - 247667Documento1 páginaRe-Examination Form - 2016: Indian Institute of Technology Roorkee, Roorkee - 247667shivam12365Ainda não há avaliações
- Modelling Air Quality in Street CanyonsDocumento28 páginasModelling Air Quality in Street Canyonsshivam12365Ainda não há avaliações
- Hostel Map - Ground Floor Vyas BhawansDocumento18 páginasHostel Map - Ground Floor Vyas Bhawansshivam12365Ainda não há avaliações
- C3 Planar Optical WaveguideDocumento30 páginasC3 Planar Optical Waveguideshivam12365Ainda não há avaliações
- C10 Optical Amplifiers IntroDocumento41 páginasC10 Optical Amplifiers Introshivam12365Ainda não há avaliações
- ForeignDirectInvestmentInRetailInINDIA (31 36)Documento7 páginasForeignDirectInvestmentInRetailInINDIA (31 36)Tanmay SrivastavaAinda não há avaliações
- Math F313 1471Documento2 páginasMath F313 1471shivam12365Ainda não há avaliações
- Math F242 1466Documento3 páginasMath F242 1466shivam12365Ainda não há avaliações
- Swaraj - by Arvind Kejriwal - EnglishDocumento74 páginasSwaraj - by Arvind Kejriwal - EnglishGaurav Bansal67% (3)
- GATE-2016 Brochure PDFDocumento36 páginasGATE-2016 Brochure PDFPinaki MukherjeeAinda não há avaliações
- Calendar Pilani Campus 2015-2016Documento2 páginasCalendar Pilani Campus 2015-2016shivam12365Ainda não há avaliações
- Compre Question PaperDocumento7 páginasCompre Question Papershivam12365Ainda não há avaliações
- Jai Prakash NarayanDocumento331 páginasJai Prakash Narayanshivam12365100% (1)
- Changing Paradigm - Social Media and Political Communication - A Situation in DelhiDocumento59 páginasChanging Paradigm - Social Media and Political Communication - A Situation in Delhishivam12365Ainda não há avaliações
- Math F212 1122Documento3 páginasMath F212 1122shivam12365Ainda não há avaliações
- Math F312 1470Documento3 páginasMath F312 1470shivam12365Ainda não há avaliações
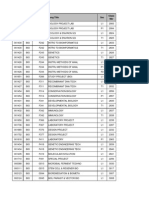
- Course ID Sub Catalog Long Title Sec Class NBRDocumento27 páginasCourse ID Sub Catalog Long Title Sec Class NBRshivam12365Ainda não há avaliações
- 07 IIC Tutorial ExDocumento5 páginas07 IIC Tutorial Exshivam12365Ainda não há avaliações
- Folded CascodeDocumento4 páginasFolded Cascodeshivam12365Ainda não há avaliações
- Math F471 1476Documento2 páginasMath F471 1476shivam12365Ainda não há avaliações
- 06 IIC Tutorial ExDocumento4 páginas06 IIC Tutorial Exshivam12365Ainda não há avaliações
- Filter LabviewDocumento8 páginasFilter Labviewshivam12365Ainda não há avaliações
- Analog & Digital VLSI Design Practice QuestionsDocumento24 páginasAnalog & Digital VLSI Design Practice QuestionsAbhinav MishraAinda não há avaliações
- MixingDocumento3 páginasMixingshivam12365Ainda não há avaliações
- MOSFET Capacitances - Junction and GateDocumento28 páginasMOSFET Capacitances - Junction and Gateshivam12365Ainda não há avaliações
- Layout of MosfetDocumento101 páginasLayout of Mosfetshivam12365Ainda não há avaliações
- Jai Prakash NarayanDocumento331 páginasJai Prakash Narayanshivam12365100% (1)
- Election Commission GuidelinesDocumento11 páginasElection Commission Guidelinesshivam12365Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Lambda-Calculus and Combinators PDFDocumento359 páginasLambda-Calculus and Combinators PDFOnly Somente100% (2)
- 4th Math Unit 6Documento96 páginas4th Math Unit 6Cassandra MartinAinda não há avaliações
- Histogram SpecificationDocumento4 páginasHistogram SpecificationAmir Mirza100% (1)
- Exam Style Questions: GuidanceDocumento7 páginasExam Style Questions: Guidanceharry potterAinda não há avaliações
- Order of Operations With Fractions (A)Documento2 páginasOrder of Operations With Fractions (A)Dhon ValeAinda não há avaliações
- Lending-Schema (Branch-Name, Branch-City, Assets, Customer-Name, Loan-Number, Amount)Documento6 páginasLending-Schema (Branch-Name, Branch-City, Assets, Customer-Name, Loan-Number, Amount)nisha tiwariAinda não há avaliações
- Optimization For Machine Learning: Lecture 8: Subgradient Method Accelerated Gradient 6.881: MITDocumento89 páginasOptimization For Machine Learning: Lecture 8: Subgradient Method Accelerated Gradient 6.881: MITMufakir Qamar AnsariAinda não há avaliações
- Sphere and CylinderDocumento4 páginasSphere and Cylinderapi-358952299Ainda não há avaliações
- Math 2011-Introduction To Multivariable Calculus (Edited by Dr. Hon-Ming HO) Practice Exercises 12: Extreme ValuesDocumento5 páginasMath 2011-Introduction To Multivariable Calculus (Edited by Dr. Hon-Ming HO) Practice Exercises 12: Extreme ValuesKritiAinda não há avaliações
- LP6Documento4 páginasLP6JJ Delegero BergadoAinda não há avaliações
- Harmonic Division and Its ApplicationsDocumento10 páginasHarmonic Division and Its ApplicationsSuchan Khankluay100% (1)
- Assembly Language For x86 Processors: Chapter 1: Basic ConceptsDocumento44 páginasAssembly Language For x86 Processors: Chapter 1: Basic ConceptsMohammad MostafaAinda não há avaliações
- Mms4 Textbook Unit3 MultiplicationanddivisionDocumento42 páginasMms4 Textbook Unit3 MultiplicationanddivisionDelfinBijuAinda não há avaliações
- QRT 1 WEEK 3 LM Lesson 10Documento4 páginasQRT 1 WEEK 3 LM Lesson 10clint xavier odangoAinda não há avaliações
- Probability Ross NotesDocumento4 páginasProbability Ross Notesaronl10Ainda não há avaliações
- Exercises: ExampleDocumento2 páginasExercises: ExampleKen LeungAinda não há avaliações
- Mathematics: Quarter 2 - Module 1 Illustrating Polynomial FunctionsDocumento17 páginasMathematics: Quarter 2 - Module 1 Illustrating Polynomial FunctionsGian Karlo BalderamaAinda não há avaliações
- Guided Math Lessons in Fifth GradeDocumento256 páginasGuided Math Lessons in Fifth GradeAndré SilveiraAinda não há avaliações
- 60 Days DSA ChallengeDocumento33 páginas60 Days DSA Challengepk100% (1)
- Wholeissue 49 6Documento53 páginasWholeissue 49 6Om DwivediAinda não há avaliações
- Science Activity Completion ReportDocumento4 páginasScience Activity Completion ReportJess DevarasAinda não há avaliações
- Equation of A Quadratic Function Through Its GraphDocumento6 páginasEquation of A Quadratic Function Through Its GraphJerson YhuwelAinda não há avaliações
- 8th Grade Math Project Menu BDocumento11 páginas8th Grade Math Project Menu Bjayesh muthyalAinda não há avaliações
- MG Grade 10 Baseline Assessment Term 1Documento5 páginasMG Grade 10 Baseline Assessment Term 1simphiwemalinga265Ainda não há avaliações
- Syllabus 6th Grade Math: Calvin - Doudt@msd - EduDocumento5 páginasSyllabus 6th Grade Math: Calvin - Doudt@msd - Eduapi-234410571Ainda não há avaliações
- On Finding Integer Solutions To Non-Homogeneous Ternary Bi-QuadraticDocumento10 páginasOn Finding Integer Solutions To Non-Homogeneous Ternary Bi-QuadraticDr. J. kannanAinda não há avaliações
- XII STD - Statistics English MediumDocumento280 páginasXII STD - Statistics English MediumSuvendu ChoudhuryAinda não há avaliações
- Surface Area and Volumes: Done By: M.Vaishnavi Grade: 9PDocumento17 páginasSurface Area and Volumes: Done By: M.Vaishnavi Grade: 9Pmahindra100% (1)
- MATHS-2A New SyllabusDocumento14 páginasMATHS-2A New SyllabusKshavzhxnAinda não há avaliações
- 2-3.eye Level - Math Curriculum - NewDocumento2 páginas2-3.eye Level - Math Curriculum - Newsyahab solehudinAinda não há avaliações