Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Service Manuel BW211D-40Documento972 páginasService Manuel BW211D-40Juan Perez93% (43)
- LTE EnodeB System Counter Description For PKG 4.0.0 - v1.0 (CSL Counters)Documento383 páginasLTE EnodeB System Counter Description For PKG 4.0.0 - v1.0 (CSL Counters)S Bhattacharya100% (4)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Raptor 350 Service ManualDocumento69 páginasRaptor 350 Service Manualjoe angleAinda não há avaliações
- M10 M20 M30Documento3 páginasM10 M20 M30Sergiu GheorghiuAinda não há avaliações
- Small-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMDocumento8 páginasSmall-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMAshok KumarAinda não há avaliações
- Bi Directional DC DC Converters PDFDocumento176 páginasBi Directional DC DC Converters PDFAshok KumarAinda não há avaliações
- Slva633 PDFDocumento14 páginasSlva633 PDFAshok KumarAinda não há avaliações
- Sprabw0b PDFDocumento19 páginasSprabw0b PDFAshok KumarAinda não há avaliações
- TND352 DDocumento79 páginasTND352 DMind of BeautyAinda não há avaliações
- Simulation of Switching ConvertersDocumento103 páginasSimulation of Switching ConvertersAshok KumarAinda não há avaliações
- Fulltext01 PDFDocumento327 páginasFulltext01 PDFAshok KumarAinda não há avaliações
- Lawler Trans Pe Jan 2004 PDFDocumento12 páginasLawler Trans Pe Jan 2004 PDFAshok KumarAinda não há avaliações
- Half Bridge An-1160 PDFDocumento32 páginasHalf Bridge An-1160 PDFAshok Kumar100% (1)
- Fulltext01 PDFDocumento327 páginasFulltext01 PDFAshok KumarAinda não há avaliações
- l24 PDFDocumento27 páginasl24 PDFAshok KumarAinda não há avaliações
- ETD MS Moon 2007 PDFDocumento143 páginasETD MS Moon 2007 PDFAshok KumarAinda não há avaliações
- A New Full Bridge DC/DC Converter Topology With ZVZCS FeaturesDocumento9 páginasA New Full Bridge DC/DC Converter Topology With ZVZCS FeaturesAshok KumarAinda não há avaliações
- Digital Simulation of ZVS DC To DC Converter Using Simulink: AbstractDocumento13 páginasDigital Simulation of ZVS DC To DC Converter Using Simulink: AbstractAshok KumarAinda não há avaliações
- Dynamic Analysis of Switching ConvertersDocumento134 páginasDynamic Analysis of Switching ConvertersAshok KumarAinda não há avaliações
- Travel Mobile Charger AbstractDocumento3 páginasTravel Mobile Charger AbstractVishalKashyap100% (1)
- Multi Battery Isolator InstructionsDocumento4 páginasMulti Battery Isolator InstructionsBrian Rice100% (1)
- 2015 Volkswagen Touareg 88310Documento684 páginas2015 Volkswagen Touareg 88310Zoltan MarosanAinda não há avaliações
- Kerui AlarmDocumento28 páginasKerui Alarmjimynet100% (1)
- Batmon Reports For CustomersDocumento6 páginasBatmon Reports For CustomersRaju MalhotraAinda não há avaliações
- Es 2330C-2820C-2830C-3520C-3530C-4520C SMDocumento1.264 páginasEs 2330C-2820C-2830C-3520C-3530C-4520C SMshinmazaraki100% (11)
- SilverznDocumento2 páginasSilverznViswajit RsAinda não há avaliações
- Battery Charging - Dodge JourneyDocumento2 páginasBattery Charging - Dodge JourneyScotty BaileyAinda não há avaliações
- AGM+Gel: Formerly Known As Global & Yuasa Co. LTDDocumento2 páginasAGM+Gel: Formerly Known As Global & Yuasa Co. LTDRakesh KumarAinda não há avaliações
- Datasheet C&D Ups (Bateria) High Rate Max InglesDocumento6 páginasDatasheet C&D Ups (Bateria) High Rate Max InglesPedroAinda não há avaliações
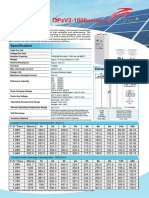
- Ritar OPzV2-1000Documento2 páginasRitar OPzV2-1000Victor BancesAinda não há avaliações
- C1 XR ManualDocumento26 páginasC1 XR ManualGugo VektorAinda não há avaliações
- Flywheel Energy StorageDocumento2 páginasFlywheel Energy StorageprasadsollapurAinda não há avaliações
- Canon PowerShot A300 GuideDocumento143 páginasCanon PowerShot A300 GuideUn AlexAinda não há avaliações
- Preface: Notebook User's ManualDocumento42 páginasPreface: Notebook User's Manualdouche101Ainda não há avaliações
- BSDG vs. ESSDocumento18 páginasBSDG vs. ESSGergely MartonAinda não há avaliações
- Future Vehicle Society Based On Electric Motor, Capacitor and Wireless Power SupplyDocumento5 páginasFuture Vehicle Society Based On Electric Motor, Capacitor and Wireless Power Supplyducvinhhung2Ainda não há avaliações
- 6FM134 XDocumento2 páginas6FM134 XSua Heo100% (1)
- Brosura MilliDI MERCKDocumento2 páginasBrosura MilliDI MERCKCorina StanculescuAinda não há avaliações
- Set 4 9A 353Documento357 páginasSet 4 9A 353Pritamjit RoutAinda não há avaliações
- SG2 User ManualDocumento24 páginasSG2 User ManualRoon HeimelAinda não há avaliações
- Ficha Seguridad Nicd SaftDocumento4 páginasFicha Seguridad Nicd SaftDiego Francisco Castañeda ViñasAinda não há avaliações
- MCU ManualDocumento49 páginasMCU Manualhung_vn_007Ainda não há avaliações
- Battery Dimensions: TerminalDocumento1 páginaBattery Dimensions: TerminalPeter PeterAinda não há avaliações
- What Is Ampere Hour?Documento52 páginasWhat Is Ampere Hour?jhasudhirarariaAinda não há avaliações