Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Houshang Karimi Houshang - Karimi@polymtl - Ca: Microgrids ControlDocumento9 páginasHoushang Karimi Houshang - Karimi@polymtl - Ca: Microgrids ControlArash TorkamanAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
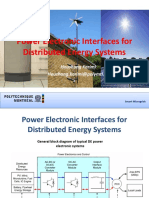
- 2 - PEI - For - DES PDFDocumento41 páginas2 - PEI - For - DES PDFArash TorkamanAinda não há avaliações
- Software Verification Plan: For TheDocumento6 páginasSoftware Verification Plan: For TheArash Torkaman0% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Industrial Electrician EsmDocumento256 páginasIndustrial Electrician EsmArash TorkamanAinda não há avaliações
- Inf3710 - Course 01 - SQLDocumento22 páginasInf3710 - Course 01 - SQLArash TorkamanAinda não há avaliações
- DO-254 Explained: by David Landoll, CadenceDocumento6 páginasDO-254 Explained: by David Landoll, CadenceArash TorkamanAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- A Sigmoid Function Based Feedback Filtered-X-LMS Algorithm With Improved Offline ModellingDocumento5 páginasA Sigmoid Function Based Feedback Filtered-X-LMS Algorithm With Improved Offline ModellingArash TorkamanAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Morales L.G. (Ed.) Adaptive Filtering ApplicationsDocumento410 páginasMorales L.G. (Ed.) Adaptive Filtering ApplicationsArash TorkamanAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Brocade Icx7x50 Stacking DPDocumento83 páginasBrocade Icx7x50 Stacking DPAshutosh SrivastavaAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- ECE462 Motor Lab Experiment3Documento14 páginasECE462 Motor Lab Experiment3eng_abdelghany1979Ainda não há avaliações
- Introduction To Fuzzy SetDocumento2 páginasIntroduction To Fuzzy SetTria Putri NoviasariAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Lexmark X792 (7562)Documento746 páginasLexmark X792 (7562)MervinSnerdAinda não há avaliações
- Deep LearningDocumento56 páginasDeep Learningmmiljana95Ainda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Dl06 Mighty MicroDocumento1 páginaDl06 Mighty MicroLeonardo Moreira LeiteAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Bootstrap Examples (Código Stata)Documento8 páginasBootstrap Examples (Código Stata)ManuelFloresMijangosAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Pythonwith Spyder An Experiential Learning PerspectiveDocumento230 páginasPythonwith Spyder An Experiential Learning PerspectivePriya kambleAinda não há avaliações
- Computer Systems Servicing NC II CGDocumento238 páginasComputer Systems Servicing NC II CGRickyJeciel100% (2)
- Aspen Simulation WorkbookDocumento24 páginasAspen Simulation Workbookwalisyh100% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Solix Enterprise ArchivingDocumento2 páginasSolix Enterprise ArchivingLinda WatsonAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- B P M (BPM) C S E Q: Usiness Rocess Anagement Ertification Ample Xamination UestionsDocumento6 páginasB P M (BPM) C S E Q: Usiness Rocess Anagement Ertification Ample Xamination UestionsMiguel Salazar ヅAinda não há avaliações
- PTC-Mathcad Software Blog: 3 Time Saving Tips Every Civil Engineer NeedsDocumento8 páginasPTC-Mathcad Software Blog: 3 Time Saving Tips Every Civil Engineer NeedsPriyanka BasuAinda não há avaliações
- XPath Extension FunctionsDocumento69 páginasXPath Extension FunctionsAlfaAinda não há avaliações
- BI&AnalyticsStartupLandscapeGlobal Mar 2016Documento125 páginasBI&AnalyticsStartupLandscapeGlobal Mar 2016Swathi PatibandlaAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Isilon CloudpoolsDocumento4 páginasIsilon CloudpoolsnicolepetrescuAinda não há avaliações
- SpywareDocumento35 páginasSpywareSai Pavan CheripallyAinda não há avaliações
- Console Stream Class Hierarchy Managing Console I/O OperationsDocumento41 páginasConsole Stream Class Hierarchy Managing Console I/O OperationsHuang Ho100% (1)
- Neo4j Cookbook - Sample ChapterDocumento31 páginasNeo4j Cookbook - Sample ChapterPackt PublishingAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Ruckus ICX FastIron v08.0.61b Release Notes PDFDocumento66 páginasRuckus ICX FastIron v08.0.61b Release Notes PDFOswaldo ValienteAinda não há avaliações
- Class 2 Introduction PythonDocumento2 páginasClass 2 Introduction PythonkunalaAinda não há avaliações
- 3 Nov Seminar ListDocumento21 páginas3 Nov Seminar ListAbhishek VermaAinda não há avaliações
- Quantum Computation EvolutionDocumento2 páginasQuantum Computation EvolutionFluffytoAinda não há avaliações
- LSP CleanerDocumento3 páginasLSP CleanerazragagiAinda não há avaliações
- How To Convert A Number To WordsDocumento20 páginasHow To Convert A Number To WordsdanieldotnetAinda não há avaliações
- Amanda Community Setup 15 MinutesDocumento18 páginasAmanda Community Setup 15 Minutesjoker014Ainda não há avaliações
- Skills For Employment Investment Project (SEIP) : Standards/ Curriculum Format For Graphics DesignDocumento10 páginasSkills For Employment Investment Project (SEIP) : Standards/ Curriculum Format For Graphics DesignSun SetAinda não há avaliações
- စံပယ္ျဖဴႏု လွပ္၍လြင့္ေသာ PDFDocumento486 páginasစံပယ္ျဖဴႏု လွပ္၍လြင့္ေသာ PDFThu Kha100% (1)
- RVZXQ Wek We' VJQ: 2020-2021 WK Ve L© 1G El© Mœvzk (M VB) Köwyi FWZ© WeáwßDocumento3 páginasRVZXQ Wek We' VJQ: 2020-2021 WK Ve L© 1G El© Mœvzk (M VB) Köwyi FWZ© WeáwßNUR MOHAMMAD MOHIUDDIN CHOWDHURY (TOHA)Ainda não há avaliações
- Fyp Airline ReservationDocumento124 páginasFyp Airline ReservationKotteshwari KottiAinda não há avaliações