Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- 100 IdeasDocumento21 páginas100 IdeasNo ID100% (1)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Case Study Analysis - WeWorkDocumento8 páginasCase Study Analysis - WeWorkHervé Kubwimana50% (2)
- Indian Traditional Musical InstrumentsDocumento3 páginasIndian Traditional Musical InstrumentsPiriya94Ainda não há avaliações
- Automated Facilities Layout Past Present and FutureDocumento19 páginasAutomated Facilities Layout Past Present and FutureJose Luis Diaz BetancourtAinda não há avaliações
- 30 de Thi Hoc Ky 2 Mon Tieng Anh Lop 9 Co Dap An 2023Documento64 páginas30 de Thi Hoc Ky 2 Mon Tieng Anh Lop 9 Co Dap An 2023Trần MaiAinda não há avaliações
- Zkp8006 Posperu Inc SacDocumento2 páginasZkp8006 Posperu Inc SacANDREA BRUNO SOLANOAinda não há avaliações
- Game ApiDocumento16 páginasGame ApiIsidora Núñez PavezAinda não há avaliações
- 5070 s17 QP 22 PDFDocumento20 páginas5070 s17 QP 22 PDFMustafa WaqarAinda não há avaliações
- Bakteri Anaerob: Morfologi, Fisiologi, Epidemiologi, Diagnosis, Pemeriksaan Sy. Miftahul El J.TDocumento46 páginasBakteri Anaerob: Morfologi, Fisiologi, Epidemiologi, Diagnosis, Pemeriksaan Sy. Miftahul El J.TAlif NakyukoAinda não há avaliações
- Encapsulation of Objects and Methods in C++Documento46 páginasEncapsulation of Objects and Methods in C++Scott StanleyAinda não há avaliações
- Pell (2017) - Trends in Real-Time Traffic SimulationDocumento8 páginasPell (2017) - Trends in Real-Time Traffic SimulationJorge OchoaAinda não há avaliações
- Wind Turbines - I. Al-BahadlyDocumento664 páginasWind Turbines - I. Al-Bahadlykevin_leigh_1Ainda não há avaliações
- DU Series MCCB CatalogueDocumento8 páginasDU Series MCCB Cataloguerobinknit2009Ainda não há avaliações
- Appendix 3 COT RPMS For T I III SY 2020 2021 in The Time of COVID 19Documento12 páginasAppendix 3 COT RPMS For T I III SY 2020 2021 in The Time of COVID 19Marjun PachecoAinda não há avaliações
- One Foot in The Grave - Copy For PlayersDocumento76 páginasOne Foot in The Grave - Copy For Playerssveni meierAinda não há avaliações
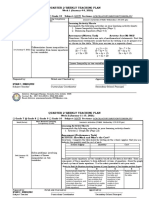
- Teaching Plan - Math 8 Week 1-8 PDFDocumento8 páginasTeaching Plan - Math 8 Week 1-8 PDFRYAN C. ENRIQUEZAinda não há avaliações
- Corporate Valuation WhartonDocumento6 páginasCorporate Valuation Whartonebrahimnejad64Ainda não há avaliações
- Starbucks Progressive Web App: Case StudyDocumento2 páginasStarbucks Progressive Web App: Case StudyYesid SuárezAinda não há avaliações
- Caldon Lefm 240ci Ultrasonic Flow Meters: Integral Manifold DesignDocumento6 páginasCaldon Lefm 240ci Ultrasonic Flow Meters: Integral Manifold DesignJim LimAinda não há avaliações
- Space Saving, Tight AccessibilityDocumento4 páginasSpace Saving, Tight AccessibilityTran HuyAinda não há avaliações
- Andromeda: Druid 3 Warborn06Documento5 páginasAndromeda: Druid 3 Warborn06AlanAinda não há avaliações
- The Attachment To Woman's Virtue in Abdulrazak Gurnah's Desertion (2005)Documento7 páginasThe Attachment To Woman's Virtue in Abdulrazak Gurnah's Desertion (2005)IJELS Research JournalAinda não há avaliações
- ERP22006Documento1 páginaERP22006Ady Surya LesmanaAinda não há avaliações
- IBS and SIBO Differential Diagnosis, SiebeckerDocumento1 páginaIBS and SIBO Differential Diagnosis, SiebeckerKrishna DasAinda não há avaliações
- The Consulting Industry and Its Transformations in WordDocumento23 páginasThe Consulting Industry and Its Transformations in Wordlei ann magnayeAinda não há avaliações
- Geography NotesDocumento2 páginasGeography NotesMinethegroundAinda não há avaliações
- Sco 8th Class Paper - B Jee-Main Wtm-15 Key&Solutions Exam DT 17-12-2022Documento4 páginasSco 8th Class Paper - B Jee-Main Wtm-15 Key&Solutions Exam DT 17-12-2022Udaya PrathimaAinda não há avaliações
- Journal Articles: Types of JournalsDocumento4 páginasJournal Articles: Types of JournalsOtieno SteveAinda não há avaliações
- When I Was A ChildDocumento2 páginasWhen I Was A Childapi-636173534Ainda não há avaliações
- Things You Can Do at Burnham ParkDocumento2 páginasThings You Can Do at Burnham ParkBcpo TeuAinda não há avaliações