Você também pode gostar
- Simnon - TutorialDocumento65 páginasSimnon - TutorialEdiane Simões MunaretoAinda não há avaliações
- Ayuda AmplDocumento11 páginasAyuda AmplpegoroAinda não há avaliações
- Lab Manual LatestDocumento72 páginasLab Manual LatestSherry Mitchelle RingoAinda não há avaliações
- Programming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"No EverandProgramming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Nota: 4.5 de 5 estrelas4.5/5 (3)
- C Language KeywordsDocumento16 páginasC Language KeywordsSunny MahurAinda não há avaliações
- Fortran IntroDocumento13 páginasFortran IntroPablo PeñasAinda não há avaliações
- L TEX and The Gnuplot Plotting ProgramDocumento9 páginasL TEX and The Gnuplot Plotting ProgrampkmatthAinda não há avaliações
- ZMLIB - Fortran Multiple Precision LibraryDocumento9 páginasZMLIB - Fortran Multiple Precision LibraryAnonymous 1rLNlqUAinda não há avaliações
- Lecture 9 Notes: Advanced Topics I: 1 TemplatesDocumento7 páginasLecture 9 Notes: Advanced Topics I: 1 TemplatesRahul MaraviAinda não há avaliações
- Jvior 234Documento1 páginaJvior 234Rejoy VMAinda não há avaliações
- A User Guide For FORTRAN 90-95-0Documento19 páginasA User Guide For FORTRAN 90-95-0Anonymous IF3H0X2vBeAinda não há avaliações
- System Model H (T) Inlet E (T) Outlet E H (T) System Model H (T) Inlet E (T) Outlet E H (T)Documento19 páginasSystem Model H (T) Inlet E (T) Outlet E H (T) System Model H (T) Inlet E (T) Outlet E H (T)WillykateKairuAinda não há avaliações
- L TEX and The Gnuplot Plotting ProgramDocumento10 páginasL TEX and The Gnuplot Plotting Programscribdacct123Ainda não há avaliações
- Mplus 2Documento12 páginasMplus 2lwdnjuAinda não há avaliações
- Structure of AlgorithmDocumento40 páginasStructure of AlgorithmMangaras Yanu FlorestiyantoAinda não há avaliações
- L TEX and The Gnuplot Plotting ProgramDocumento10 páginasL TEX and The Gnuplot Plotting ProgramcanicueAinda não há avaliações
- TCL FundamentalsDocumento22 páginasTCL FundamentalsKanhaiya MishraAinda não há avaliações
- R10 Compiler Design Unit-7 Code OptimizationDocumento14 páginasR10 Compiler Design Unit-7 Code OptimizationStephenKarunakarAinda não há avaliações
- C ProgramingDocumento11 páginasC ProgramingOFFICIALAinda não há avaliações
- Chapter 11-2 Modeling and Simulating Dynamic Systems With Matlab The Physical ModelDocumento18 páginasChapter 11-2 Modeling and Simulating Dynamic Systems With Matlab The Physical ModelEng-Mohammed KayedAinda não há avaliações
- C and C++ NotesDocumento134 páginasC and C++ NotesSean NormanAinda não há avaliações
- Unit 1 Models For Executing Algorithms - Iii: TM: Structure Page NosDocumento35 páginasUnit 1 Models For Executing Algorithms - Iii: TM: Structure Page NosAmit DasAinda não há avaliações
- Intoduction To MATLABDocumento10 páginasIntoduction To MATLABiamarvikAinda não há avaliações
- Interview QuestionsDocumento12 páginasInterview QuestionsAli NaveedAinda não há avaliações
- Random Numbers Omnet++Documento4 páginasRandom Numbers Omnet++Jessica RodríguezAinda não há avaliações
- TputDocumento16 páginasTputHarsh MahtoAinda não há avaliações
- Espresso TutorialDocumento9 páginasEspresso TutorialsckidAinda não há avaliações
- Transition Guide For Experienced Users: Out Out Out inDocumento3 páginasTransition Guide For Experienced Users: Out Out Out inAli AHAinda não há avaliações
- Data Structure Part 3Documento18 páginasData Structure Part 3keybird davidAinda não há avaliações
- An Introduction To Linear Recursive Sequences in Spread Spectrum SystemsDocumento23 páginasAn Introduction To Linear Recursive Sequences in Spread Spectrum SystemsMarwa AtefAinda não há avaliações
- Assign 3 PythonDocumento5 páginasAssign 3 Pythonbairwamanisha972Ainda não há avaliações
- Defines A Local Variable As Having A Local Lifetime.: Nested FunctionsDocumento18 páginasDefines A Local Variable As Having A Local Lifetime.: Nested FunctionsPNV Srinivasa RaoAinda não há avaliações
- My AssignmentDocumento6 páginasMy AssignmentpoopapuleAinda não há avaliações
- AsmDocumento56 páginasAsmkarn1992Ainda não há avaliações
- Simulating and Analyzing The Fourier Series and Fourier Transform Using Matlab ObjectivesDocumento18 páginasSimulating and Analyzing The Fourier Series and Fourier Transform Using Matlab ObjectivesTayyba noreenAinda não há avaliações
- Em Users GuideDocumento18 páginasEm Users GuidedonlockwoodAinda não há avaliações
- Chapitre5 enDocumento9 páginasChapitre5 enBhan aa3Ainda não há avaliações
- Daa Cia 2 KeyDocumento10 páginasDaa Cia 2 KeyAngel LeoAinda não há avaliações
- TR0117 Digital SimCode ReferenceDocumento34 páginasTR0117 Digital SimCode ReferenceonafetsAinda não há avaliações
- DAA All1Documento56 páginasDAA All1jamdadeanujAinda não há avaliações
- Matlab No. 12Documento10 páginasMatlab No. 12earlygearAinda não há avaliações
- Appendix 5 The Fortran Simulation Translator (FST), A Simulation LanguageDocumento18 páginasAppendix 5 The Fortran Simulation Translator (FST), A Simulation LanguagePitambar PaudelAinda não há avaliações
- ASEMBLERDocumento10 páginasASEMBLERزهر الدين ضيفAinda não há avaliações
- Batch ManDocumento23 páginasBatch Manhergamia9872Ainda não há avaliações
- Weekly PP PDFDocumento11 páginasWeekly PP PDFDanielHaileAinda não há avaliações
- Digital Control Systems: Lecture NotesDocumento61 páginasDigital Control Systems: Lecture NotesHari Pavan0391Ainda não há avaliações
- Modelling, Scheduling and Simulation of Flexible Manufacturing Systems Using Extended Stochastic High-Level Evaluation Petri NetsDocumento20 páginasModelling, Scheduling and Simulation of Flexible Manufacturing Systems Using Extended Stochastic High-Level Evaluation Petri NetsAmrik SinghAinda não há avaliações
- Aho Johnson PaperDocumento14 páginasAho Johnson PaperGanesh SutarAinda não há avaliações
- Phase Locked Loop Design FundamentalsDocumento22 páginasPhase Locked Loop Design Fundamentalsptt3iAinda não há avaliações
- Strings in C Programming: Declaration StatementDocumento3 páginasStrings in C Programming: Declaration StatementNishanthi_Seka_2768Ainda não há avaliações
- Iilicon Computer Program User'S Guide: V V V VDocumento14 páginasIilicon Computer Program User'S Guide: V V V VMiguel Angel Vilca RojasAinda não há avaliações
- Simulated Annealing For The Optimisation of A Constrained Simulation Model in ExcellDocumento19 páginasSimulated Annealing For The Optimisation of A Constrained Simulation Model in Excelllcm3766lAinda não há avaliações
- C Programming ExercisesDocumento6 páginasC Programming Exercisesparth149Ainda não há avaliações
- Elt316 2011 Lab3Documento13 páginasElt316 2011 Lab3Courtley AlbertAinda não há avaliações
- FTSM - Fast Takagi-Sugeno Fuzzy Modeling Manfred MännleDocumento6 páginasFTSM - Fast Takagi-Sugeno Fuzzy Modeling Manfred MännleCarlos SilvassauroAinda não há avaliações
- 1 SQL - Structured Query Language: 1.1 TablesDocumento19 páginas1 SQL - Structured Query Language: 1.1 Tablesapi-26434328Ainda não há avaliações
- SSMT Solution ManualDocumento12 páginasSSMT Solution ManualPraahas Amin0% (1)
- Chapter 8 - 1935 Rife Ray #4 Rife MachineDocumento2 páginasChapter 8 - 1935 Rife Ray #4 Rife MachineKhalid IbrahimAinda não há avaliações
- Swot Analysis of PTCLDocumento5 páginasSwot Analysis of PTCLM Aqeel Akhtar JajjaAinda não há avaliações
- Lab 1: Basic Cisco Device Configuration: Topology DiagramDocumento17 páginasLab 1: Basic Cisco Device Configuration: Topology DiagramnhiAinda não há avaliações
- Vacuum Gauges 45Documento20 páginasVacuum Gauges 45Sameeksha AnandAinda não há avaliações
- Arni AdvertisementDocumento2 páginasArni AdvertisementHemanthAinda não há avaliações
- History of Gun PowderDocumento32 páginasHistory of Gun PowderHerbert GongonAinda não há avaliações
- ILO - Working Conditions of Contract Workers in The Oil and Gas IndustriesDocumento106 páginasILO - Working Conditions of Contract Workers in The Oil and Gas IndustriesLuís Augusto Lopes100% (1)
- A Project Report On DMRCDocumento22 páginasA Project Report On DMRCRahul Mehrotra100% (1)
- Promt MidjourneyDocumento2 páginasPromt MidjourneyMarcelo PaixaoAinda não há avaliações
- ST 010 ISBT 128 Standard Product Description Code Database v6.0.0Documento34 páginasST 010 ISBT 128 Standard Product Description Code Database v6.0.0Patrick Ramos100% (1)
- Ethods For Mitigation of Voltage Fluctuation Effects: Publication No Cu0208 Issue Date: November 2014Documento5 páginasEthods For Mitigation of Voltage Fluctuation Effects: Publication No Cu0208 Issue Date: November 2014Camilo CortesAinda não há avaliações
- TQM Model ExamDocumento5 páginasTQM Model ExamsaswarajAinda não há avaliações
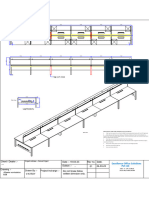
- 6seater Workstation B2BDocumento1 página6seater Workstation B2BDid ProjectsAinda não há avaliações
- How Cell Phones WorkDocumento12 páginasHow Cell Phones Workavinash_knitAinda não há avaliações
- Nivel Liquido Dodge 62teDocumento4 páginasNivel Liquido Dodge 62teMario Do' HirchsAinda não há avaliações
- Iphone App DevelopmentDocumento18 páginasIphone App DevelopmentVinay BharadwajAinda não há avaliações
- My CVDocumento2 páginasMy CVKourosh AhadiAinda não há avaliações
- Brake Actuator Instruction - ManualDocumento32 páginasBrake Actuator Instruction - ManualJoeAinda não há avaliações
- Solved MAT 2012 Paper With Solutions PDFDocumento81 páginasSolved MAT 2012 Paper With Solutions PDFAnshuman NarangAinda não há avaliações
- KBC Nano in English PDFDocumento57 páginasKBC Nano in English PDFBHUKKAD BOX100% (1)
- Security Issues in Modern Automotive Systems: Patrick NischDocumento6 páginasSecurity Issues in Modern Automotive Systems: Patrick NischEdson PatrícioAinda não há avaliações
- Sangfor NGAF Introduction 8.0.5 FinalDocumento24 páginasSangfor NGAF Introduction 8.0.5 FinalAlbarn Paul AlicanteAinda não há avaliações
- MSDS Argon Compressed GasDocumento6 páginasMSDS Argon Compressed Gassajid aliAinda não há avaliações
- Mobile Crane Inspector & CertificationDocumento3 páginasMobile Crane Inspector & CertificationgptothAinda não há avaliações
- Project Goals/ ObjectivesDocumento51 páginasProject Goals/ ObjectivesJoyce Abegail De PedroAinda não há avaliações
- Business Value of Bim in Middle EastDocumento52 páginasBusiness Value of Bim in Middle EastshahbazdgAinda não há avaliações
- Density and Concentration Transmitter: Installation GuideDocumento40 páginasDensity and Concentration Transmitter: Installation GuideOmid GhAinda não há avaliações
- Helukabel F-Cy-JzDocumento2 páginasHelukabel F-Cy-JzMikko MagtibayAinda não há avaliações
- Sony NX Series PDFDocumento62 páginasSony NX Series PDFMaya Tes0% (1)
- Hero Found: The Greatest POW Escape of the Vietnam WarNo EverandHero Found: The Greatest POW Escape of the Vietnam WarNota: 4 de 5 estrelas4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonNo EverandSully: The Untold Story Behind the Miracle on the HudsonNota: 4 de 5 estrelas4/5 (103)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureNo EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureNota: 5 de 5 estrelas5/5 (125)
- The Fabric of Civilization: How Textiles Made the WorldNo EverandThe Fabric of Civilization: How Textiles Made the WorldNota: 4.5 de 5 estrelas4.5/5 (58)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachNo EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachNota: 3.5 de 5 estrelas3.5/5 (6)
- The Future of Geography: How the Competition in Space Will Change Our WorldNo EverandThe Future of Geography: How the Competition in Space Will Change Our WorldNota: 4 de 5 estrelas4/5 (6)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyAinda não há avaliações
- Four Battlegrounds: Power in the Age of Artificial IntelligenceNo EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceNota: 5 de 5 estrelas5/5 (5)
- The End of Craving: Recovering the Lost Wisdom of Eating WellNo EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellNota: 4.5 de 5 estrelas4.5/5 (82)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaAinda não há avaliações
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreNo EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreNota: 4.5 de 5 estrelas4.5/5 (33)
- The Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeNo EverandThe Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeNota: 4.5 de 5 estrelas4.5/5 (99)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterNo EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterAinda não há avaliações
- System Error: Where Big Tech Went Wrong and How We Can RebootNo EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootAinda não há avaliações
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationNo EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationNota: 4.5 de 5 estrelas4.5/5 (46)
- Highest Duty: My Search for What Really MattersNo EverandHighest Duty: My Search for What Really MattersAinda não há avaliações
- Pale Blue Dot: A Vision of the Human Future in SpaceNo EverandPale Blue Dot: A Vision of the Human Future in SpaceNota: 4.5 de 5 estrelas4.5/5 (588)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindAinda não há avaliações
- Reality+: Virtual Worlds and the Problems of PhilosophyNo EverandReality+: Virtual Worlds and the Problems of PhilosophyNota: 4 de 5 estrelas4/5 (24)
- The Knowledge: How to Rebuild Our World from ScratchNo EverandThe Knowledge: How to Rebuild Our World from ScratchNota: 3.5 de 5 estrelas3.5/5 (133)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerNo EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerNota: 4.5 de 5 estrelas4.5/5 (54)
- Process Plant Equipment: Operation, Control, and ReliabilityNo EverandProcess Plant Equipment: Operation, Control, and ReliabilityNota: 5 de 5 estrelas5/5 (1)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerNo EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerNota: 4.5 de 5 estrelas4.5/5 (122)
- A Place of My Own: The Architecture of DaydreamsNo EverandA Place of My Own: The Architecture of DaydreamsNota: 4 de 5 estrelas4/5 (242)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestNo EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestNota: 4 de 5 estrelas4/5 (28)