Você também pode gostar
- PETAL Sentence StartersDocumento1 páginaPETAL Sentence StartersSnip x Hunt manAinda não há avaliações
- NUS CAP Calculator On ExcelDocumento5 páginasNUS CAP Calculator On ExcelMatt JamilAinda não há avaliações
- Words of Radiance: Book Two of The Stormlight Archive - Brandon SandersonDocumento6 páginasWords of Radiance: Book Two of The Stormlight Archive - Brandon Sandersonxyrytepa0% (3)
- Comparison of Different FE Calculation Methods For The Electromagnetic Torque of PM MachinesDocumento8 páginasComparison of Different FE Calculation Methods For The Electromagnetic Torque of PM Machinesmlkz_01Ainda não há avaliações
- Grade Mixing Analysis in Steelmaking Tundishusing Different Turbulence ModelsDocumento6 páginasGrade Mixing Analysis in Steelmaking Tundishusing Different Turbulence ModelsrakukulappullyAinda não há avaliações
- Coordinate SystemsDocumento111 páginasCoordinate SystemsPeter HausmanAinda não há avaliações
- E01 33kV and 11 KV Lightning Arresters (1) - 2010Documento12 páginasE01 33kV and 11 KV Lightning Arresters (1) - 2010Ashwin RaparthiAinda não há avaliações
- Mini Project 2016Documento7 páginasMini Project 2016khooteckkienAinda não há avaliações
- Rocket Lab ReportDocumento9 páginasRocket Lab Reportapi-254748115Ainda não há avaliações
- Modelling Ngong River Final Project 2010Documento109 páginasModelling Ngong River Final Project 20101man1bookAinda não há avaliações
- 25 Middlegame Concepts Every Chess Player Must KnowDocumento2 páginas25 Middlegame Concepts Every Chess Player Must KnowKasparicoAinda não há avaliações
- Volvo BL 71 ManualDocumento280 páginasVolvo BL 71 ManualAlberto G.D.100% (2)
- BAEC Annual Report 14-15 - PressDocumento161 páginasBAEC Annual Report 14-15 - PressSazzad Hossain LemonAinda não há avaliações
- Design and Implementation of Attitude Control For 3-Axes Magnetic Coil Stabilization of A SpacecraftDocumento146 páginasDesign and Implementation of Attitude Control For 3-Axes Magnetic Coil Stabilization of A SpacecraftManoj SaralayaAinda não há avaliações
- gpdk045 PDK ReferencemanualDocumento128 páginasgpdk045 PDK ReferencemanualMasud SarkerAinda não há avaliações
- FYP 1 ReportDocumento75 páginasFYP 1 ReportWWZAinda não há avaliações
- Disturbance Compensation For Gun Control System of Tank Based On LADRC (289KB)Documento4 páginasDisturbance Compensation For Gun Control System of Tank Based On LADRC (289KB)Suresh SAinda não há avaliações
- Study of Quality Management in Construction Industry: I J I R S E TDocumento8 páginasStudy of Quality Management in Construction Industry: I J I R S E Trizwan hassanAinda não há avaliações
- Volve Seismic ST10010 Report - 1545785889Documento108 páginasVolve Seismic ST10010 Report - 1545785889kamAinda não há avaliações
- Damping and Tracking Control Schemes For NanopositioningDocumento13 páginasDamping and Tracking Control Schemes For NanopositioningmvcAinda não há avaliações
- 37DLPLUS ManualDocumento300 páginas37DLPLUS ManualAriel TerrensAinda não há avaliações
- Uk048e New Range LediDocumento16 páginasUk048e New Range LediSayed HashemAinda não há avaliações
- Centripetal AccelerationDocumento2 páginasCentripetal AccelerationDaniel ByrneAinda não há avaliações
- Axle Application Guidelines: Revised 12-18Documento99 páginasAxle Application Guidelines: Revised 12-18haviettuanAinda não há avaliações
- Call 3220Documento456 páginasCall 3220Nano GomeshAinda não há avaliações
- GRAPE User's GuideDocumento114 páginasGRAPE User's GuidetotoAinda não há avaliações
- Heat Transfer Module Users GuideDocumento374 páginasHeat Transfer Module Users GuidefarlaraAinda não há avaliações
- 2.ULC-1000AN Unit Description V3.4Documento87 páginas2.ULC-1000AN Unit Description V3.4arash falahatgarAinda não há avaliações
- K PDocumento15 páginasK Palokesh1982Ainda não há avaliações
- A Brief Introduction To The Written Test: Representative Questions of Test PaperDocumento10 páginasA Brief Introduction To The Written Test: Representative Questions of Test PaperAyesha RasheedAinda não há avaliações
- H-Plane Metal Plate Lens AntennaDocumento15 páginasH-Plane Metal Plate Lens AntennaTanvi SethiaAinda não há avaliações
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Documento12 páginasDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipAinda não há avaliações
- Cusack PHD ThesisDocumento142 páginasCusack PHD ThesisJitendra KumarAinda não há avaliações
- NXE1 ManualDocumento124 páginasNXE1 ManualDorival Junior Ferreira de Mello0% (1)
- Topic5a XRDDocumento12 páginasTopic5a XRDHusnain RazaAinda não há avaliações
- Graduate Profile SEECS BICSEDocumento46 páginasGraduate Profile SEECS BICSEHajiasifAliAinda não há avaliações
- Peter Hansen - Physics of FailureDocumento9 páginasPeter Hansen - Physics of FailureVicky GautamAinda não há avaliações
- Photomultiplier Tubes: Photon Is Our BusinessDocumento323 páginasPhotomultiplier Tubes: Photon Is Our Businessico haydAinda não há avaliações
- Guide - Google Earth Enterprise - Server HelpDocumento45 páginasGuide - Google Earth Enterprise - Server HelplasdjaiseAinda não há avaliações
- DC Characteristics of A MOS Transistor (MOSFET) : Solved With COMSOL Multiphysics 4.4Documento18 páginasDC Characteristics of A MOS Transistor (MOSFET) : Solved With COMSOL Multiphysics 4.4shree_rs81Ainda não há avaliações
- Design of High-Efficiency Rare-Earth Permanent Magnet SynchronousDocumento121 páginasDesign of High-Efficiency Rare-Earth Permanent Magnet Synchronous林子筠Ainda não há avaliações
- Tutorial XSpectraDocumento84 páginasTutorial XSpectranapolesdAinda não há avaliações
- COMSOL HANDBOOK SERIES Essentials of Postprocessing and Visualization PDFDocumento36 páginasCOMSOL HANDBOOK SERIES Essentials of Postprocessing and Visualization PDFlucyli115Ainda não há avaliações
- PhysicsDocumento8 páginasPhysicshii ungAinda não há avaliações
- 07 Circuits & Systems. Analog & Digital Signal ProcessingDocumento1.041 páginas07 Circuits & Systems. Analog & Digital Signal ProcessingAngel CelestialAinda não há avaliações
- Optical Amplifier1Documento8 páginasOptical Amplifier1Sunil FageriaAinda não há avaliações
- ANZSCO List of OccupationsDocumento854 páginasANZSCO List of OccupationsSaravanan RasayaAinda não há avaliações
- FEBio TM 2.4 ManDocumento150 páginasFEBio TM 2.4 Manc2610154Ainda não há avaliações
- Discussion 2 - Intro To Lumerical and DVD Tutorial, Cont'dDocumento42 páginasDiscussion 2 - Intro To Lumerical and DVD Tutorial, Cont'dBích Đỗ DanhAinda não há avaliações
- Piezoelectric PDFDocumento10 páginasPiezoelectric PDFNicolaus AnelkaAinda não há avaliações
- Mid-Year Examination Prep2Documento6 páginasMid-Year Examination Prep2Ayman ElshishtawyAinda não há avaliações
- Grigorenko 2020Documento16 páginasGrigorenko 2020Igor Loza100% (1)
- ELEG5443 Nonlinear Systems Syllabus 2017 Detailed v01Documento3 páginasELEG5443 Nonlinear Systems Syllabus 2017 Detailed v01Akram MohamedAinda não há avaliações
- Phase Velocity Method For Lamb Waves in Pulse EchoesDocumento8 páginasPhase Velocity Method For Lamb Waves in Pulse EchoesAdrian ToaderAinda não há avaliações
- A Comparative Study of Non-Thermal Plasma Assisted Reforming Technologies PDFDocumento20 páginasA Comparative Study of Non-Thermal Plasma Assisted Reforming Technologies PDFmoveee2Ainda não há avaliações
- Klystron Testing LectureDocumento36 páginasKlystron Testing LecturerajarpitAinda não há avaliações
- BTechSyllabus EC PDFDocumento140 páginasBTechSyllabus EC PDFHHAinda não há avaliações
- Emt 3202 PresentationDocumento56 páginasEmt 3202 Presentationelio100% (1)
- Lte Dfe App NoteDocumento87 páginasLte Dfe App NoteNgờuyênnguyênngãNguyễn TờiêntiênsắcTiến SờangsangsắcSáng NguyễntiếnSángAinda não há avaliações
- IMCORRDocumento247 páginasIMCORRSebastián Esteban Cisternas GuzmánAinda não há avaliações
- PAW MethodDocumento35 páginasPAW MethodShameekaAinda não há avaliações
- TMS320x28xx, 28xxx DSP Peripheral PDFDocumento22 páginasTMS320x28xx, 28xxx DSP Peripheral PDFHiren MistryAinda não há avaliações
- Structure and Properties of Inorganic Solids: International Series of Monographs in Solid State PhysicsNo EverandStructure and Properties of Inorganic Solids: International Series of Monographs in Solid State PhysicsAinda não há avaliações
- Mathematical Aspects of Seismology: Developments in Solid Earth GeophysicsNo EverandMathematical Aspects of Seismology: Developments in Solid Earth GeophysicsAinda não há avaliações
- European Asphalt Standards DatasheetDocumento1 páginaEuropean Asphalt Standards DatasheetmandraktreceAinda não há avaliações
- Federalist Papers 10 51 ExcerptsDocumento2 páginasFederalist Papers 10 51 Excerptsapi-292351355Ainda não há avaliações
- How Chargers WorkDocumento21 páginasHow Chargers WorkMuhammad Irfan RiazAinda não há avaliações
- Praise and Worship Songs Volume 2 PDFDocumento92 páginasPraise and Worship Songs Volume 2 PDFDaniel AnayaAinda não há avaliações
- Hare and Hyena: Mutugi KamundiDocumento18 páginasHare and Hyena: Mutugi KamundiAndresileAinda não há avaliações
- Very Narrow Aisle MTC Turret TruckDocumento6 páginasVery Narrow Aisle MTC Turret Truckfirdaushalam96Ainda não há avaliações
- Yale Revision WorksheetDocumento3 páginasYale Revision WorksheetYASHI AGRAWALAinda não há avaliações
- AISOY1 KiK User ManualDocumento28 páginasAISOY1 KiK User ManualLums TalyerAinda não há avaliações
- Healthy Apps Us New VarDocumento9 páginasHealthy Apps Us New VarJESUS DELGADOAinda não há avaliações
- Combined South Dakota Motions To Reconsider in ICWA CaseDocumento53 páginasCombined South Dakota Motions To Reconsider in ICWA CaseLee StranahanAinda não há avaliações
- OT Initial Assessment (OTIA) 2022-11-15Documento2 páginasOT Initial Assessment (OTIA) 2022-11-15funtikarAinda não há avaliações
- Lesson 1 3 Transes in Reading in Philippine HistoryDocumento17 páginasLesson 1 3 Transes in Reading in Philippine HistoryNAPHTALI WILLIAMS GOAinda não há avaliações
- Alaba Adeyemi AdediwuraDocumento12 páginasAlaba Adeyemi AdediwuraSchahyda ArleyAinda não há avaliações
- SCERT Kerala State Syllabus 9th Standard English Textbooks Part 1-1Documento104 páginasSCERT Kerala State Syllabus 9th Standard English Textbooks Part 1-1Athulya ThondangattilAinda não há avaliações
- Mueller Hinton Agar (M-H Agar) : CompositionDocumento2 páginasMueller Hinton Agar (M-H Agar) : CompositionRizkaaulyaaAinda não há avaliações
- Analysis of Rates (Nh-15 Barmer - Sanchor)Documento118 páginasAnalysis of Rates (Nh-15 Barmer - Sanchor)rahulchauhan7869Ainda não há avaliações
- Mfin 7002 Investment Analysis and Portfolio ManagementDocumento5 páginasMfin 7002 Investment Analysis and Portfolio ManagementjessieAinda não há avaliações
- Lacey Robertson Resume 3-6-20Documento1 páginaLacey Robertson Resume 3-6-20api-410771996Ainda não há avaliações
- SDSSSSDDocumento1 páginaSDSSSSDmirfanjpcgmailcomAinda não há avaliações
- The Rise of Australian NovelDocumento412 páginasThe Rise of Australian NovelSampath Kumar GummadiAinda não há avaliações
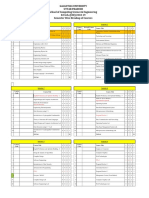
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocumento2 páginasGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiAinda não há avaliações
- Caterpillar Cat C7 Marine Engine Parts Catalogue ManualDocumento21 páginasCaterpillar Cat C7 Marine Engine Parts Catalogue ManualkfsmmeAinda não há avaliações
- Enlightened ExperimentationDocumento8 páginasEnlightened ExperimentationRaeed HassanAinda não há avaliações
- Generation III Sonic Feeder Control System Manual 20576Documento32 páginasGeneration III Sonic Feeder Control System Manual 20576julianmataAinda não há avaliações
- Song Book Inner PagesDocumento140 páginasSong Book Inner PagesEliazer PetsonAinda não há avaliações
- Word CountDocumento3 páginasWord CountLeo LonardelliAinda não há avaliações