Você também pode gostar
- Relay: What Is A Relay?Documento21 páginasRelay: What Is A Relay?shweta_770587Ainda não há avaliações
- DC Motor Lab: 1.1 The ExperimentDocumento9 páginasDC Motor Lab: 1.1 The ExperimentTammanurRaviAinda não há avaliações
- Traffic Light PLC Control DiagramDocumento9 páginasTraffic Light PLC Control DiagramabiyotaderieAinda não há avaliações
- What Is A RelayDocumento8 páginasWhat Is A RelayRasheed ShahAinda não há avaliações
- Relay & ContactorDocumento9 páginasRelay & Contactorraj kharatAinda não há avaliações
- LADDER LOGIC DIAGRAMSDocumento8 páginasLADDER LOGIC DIAGRAMSAnirban PahariAinda não há avaliações
- REVERSIBLE STAR DELTA MOTOR CONTROLLER CONTROL CIRCUIT DIAGRAM GUIDEDocumento6 páginasREVERSIBLE STAR DELTA MOTOR CONTROLLER CONTROL CIRCUIT DIAGRAM GUIDEAbdul Haleem100% (3)
- Electrical MachinesDocumento15 páginasElectrical Machinesraj sekharAinda não há avaliações
- Brushless Motor and ArduinoDocumento8 páginasBrushless Motor and ArduinostellaAinda não há avaliações
- Automatic Electromagnetic ClutchDocumento15 páginasAutomatic Electromagnetic Clutchtapas_kbAinda não há avaliações
- Relay Operation Types Symbols & CharacteristicsDocumento13 páginasRelay Operation Types Symbols & CharacteristicsInférus AdvenæAinda não há avaliações
- Star-Delta-Forward-Reverse CircuitDocumento6 páginasStar-Delta-Forward-Reverse CircuitReuel NhariAinda não há avaliações
- MAS.865 2018 How To Make Something That Makes (Almost) AnythingDocumento12 páginasMAS.865 2018 How To Make Something That Makes (Almost) AnythingSharanAinda não há avaliações
- Documentation Stepper MotorDocumento22 páginasDocumentation Stepper MotorsolidwormAinda não há avaliações
- Electro 3 Finals Task PerformanceDocumento23 páginasElectro 3 Finals Task PerformanceJuan Miguel TorresAinda não há avaliações
- How Stepper Motors Work: The RotorDocumento3 páginasHow Stepper Motors Work: The RotorAhmedShahAinda não há avaliações
- What Is An Electrical Switch?Documento6 páginasWhat Is An Electrical Switch?Aeylla ZeoraineAinda não há avaliações
- How Things Work - Relay SwitchesDocumento4 páginasHow Things Work - Relay SwitchessaurabhdabasAinda não há avaliações
- Automatic Drain CleanerDocumento45 páginasAutomatic Drain CleanerArun Kumar Yadav70% (10)
- Automatic Door Open @close Report FinalDocumento36 páginasAutomatic Door Open @close Report FinalFelixJosephAinda não há avaliações
- Unit: V Techniques of Motor Control Magnetic Control of Ac MotorDocumento9 páginasUnit: V Techniques of Motor Control Magnetic Control of Ac MotorPKAinda não há avaliações
- Button Operated Gear Shifting System Using ElectromagnetsDocumento5 páginasButton Operated Gear Shifting System Using ElectromagnetsJashandeep Singh100% (1)
- Work Shop MoterDocumento23 páginasWork Shop Moterbelacheweshetu222Ainda não há avaliações
- Stepper MotorDocumento10 páginasStepper MotorboscoAinda não há avaliações
- Motor LP KristyDocumento13 páginasMotor LP KristyhamitiAinda não há avaliações
- DC Motor: 3.2.1 Principles of OperationDocumento9 páginasDC Motor: 3.2.1 Principles of Operationnafisa sultanaAinda não há avaliações
- Literature Review On Star Delta StarterDocumento7 páginasLiterature Review On Star Delta Startertbwrxxvkg100% (1)
- Automotive Electrical SystemDocumento55 páginasAutomotive Electrical SystemMoriel J. NudoAinda não há avaliações
- Electromagnetic Clutch System Full SeminarDocumento28 páginasElectromagnetic Clutch System Full SeminarPranay Gaddam100% (1)
- Star-Delta Motor Starter PDFDocumento9 páginasStar-Delta Motor Starter PDFWrya Saeed0% (1)
- Star-Delta Motor Starter Explained in DetailsDocumento10 páginasStar-Delta Motor Starter Explained in DetailsFrenzy TaherAinda não há avaliações
- RelaysDocumento6 páginasRelaysEmilJaredVirayPabustan100% (1)
- Basics of Relays Explained: Design, Working, ApplicationsDocumento5 páginasBasics of Relays Explained: Design, Working, ApplicationsaliAinda não há avaliações
- New Star Delta Forward ReverseDocumento9 páginasNew Star Delta Forward ReverseBasuki Ikhy100% (1)
- Electrical Actuation SystemDocumento78 páginasElectrical Actuation Systemnaughty dela cruzAinda não há avaliações
- Introduction To Star-Delta Motor StarterDocumento9 páginasIntroduction To Star-Delta Motor StarterBala SrivasAinda não há avaliações
- DC MotorsDocumento2 páginasDC MotorsSunil DevulapalliAinda não há avaliações
- Task4 ClarDocumento14 páginasTask4 ClarSteve ClarAinda não há avaliações
- Motorized Four Wheel Nut RemovalDocumento44 páginasMotorized Four Wheel Nut RemovalAmrrish S LAinda não há avaliações
- What Is A Relay?: Types of Relays How To Test A RelayDocumento7 páginasWhat Is A Relay?: Types of Relays How To Test A RelaySarath Chandra SaiAinda não há avaliações
- Moving Pulse GeneratorDocumento99 páginasMoving Pulse Generatorabc1000100% (1)
- Ladder Diagram: (Type Here) (Type Here) (Type Here)Documento2 páginasLadder Diagram: (Type Here) (Type Here) (Type Here)HOD & Asst Prof MECHAinda não há avaliações
- Star-Delta motor starter guideDocumento12 páginasStar-Delta motor starter guideCharles NunezAinda não há avaliações
- Here Robot Is Basically A Differential Wheel Robot Whose Movement Is Based On Differential Drive Mechanism Which Is Explained BelowDocumento9 páginasHere Robot Is Basically A Differential Wheel Robot Whose Movement Is Based On Differential Drive Mechanism Which Is Explained BelowLaveen BakshiAinda não há avaliações
- Automotive InstrumentationDocumento5 páginasAutomotive InstrumentationSagar MahajanAinda não há avaliações
- Stepper Motors With ArduinoDocumento19 páginasStepper Motors With Arduinochafic WEISSAinda não há avaliações
- D3.2 ActuatorsDocumento9 páginasD3.2 ActuatorsTanya AayogAinda não há avaliações
- Load Angle ExplanationDocumento10 páginasLoad Angle ExplanationTareq AzizAinda não há avaliações
- Electromagnetic Clutch System Full Seminar Report 4537Documento30 páginasElectromagnetic Clutch System Full Seminar Report 4537Lalit Tanan100% (1)
- Construct Electric MotorDocumento15 páginasConstruct Electric MotorcontrasterAinda não há avaliações
- Types of SwitchesDocumento10 páginasTypes of SwitchesAbas S. AcmadAinda não há avaliações
- Introduction To Star-Delta Motor StarterDocumento14 páginasIntroduction To Star-Delta Motor StarterKudzie Maphy MasaireAinda não há avaliações
- SoloneidDocumento44 páginasSoloneidlokesh_045Ainda não há avaliações
- EES (Lec20)Documento16 páginasEES (Lec20)Muhammad SagheerAinda não há avaliações
- Starter MotorDocumento4 páginasStarter MotorLong NguyễnAinda não há avaliações
- A New System of Alternating Current Motors and Transformers and Other EssaysNo EverandA New System of Alternating Current Motors and Transformers and Other EssaysNota: 5 de 5 estrelas5/5 (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationNo EverandStudy of a reluctance magnetic gearbox for energy storage system applicationNota: 1 de 5 estrelas1/5 (1)
- A New System of Alternating Current Motors and TransformersNo EverandA New System of Alternating Current Motors and TransformersNota: 1 de 5 estrelas1/5 (1)
- ShorelineDocumento166 páginasShorelinegautamAinda não há avaliações
- Pollution Control - Particle Formation & Emission ControlDocumento21 páginasPollution Control - Particle Formation & Emission ControlPradyumna KSAinda não há avaliações
- ThalitaDocumento1 páginaThalitaShinta Liri HasugianAinda não há avaliações
- Newshort Fibre Composites PDFDocumento14 páginasNewshort Fibre Composites PDFPradyumna KSAinda não há avaliações
- Ceramic Matrix Composites ExplainedDocumento23 páginasCeramic Matrix Composites ExplainedPradyumna KSAinda não há avaliações
- Guide To BSC Numerical MethodsDocumento223 páginasGuide To BSC Numerical Methodsbldfst12151878% (23)
- Newshort Fibre Composites PDFDocumento14 páginasNewshort Fibre Composites PDFPradyumna KSAinda não há avaliações
- ME 418 Composite MaterialsDocumento4 páginasME 418 Composite MaterialsPradyumna KSAinda não há avaliações
- Standard Discharge SummaryDocumento2 páginasStandard Discharge SummaryPradyumna KSAinda não há avaliações
- Ceramic Matrix Composites ExplainedDocumento23 páginasCeramic Matrix Composites ExplainedPradyumna KSAinda não há avaliações
- isubtitles.net.txtDocumento1 páginaisubtitles.net.txtPradyumna KSAinda não há avaliações
- CamScanner app scans multiple pagesDocumento5 páginasCamScanner app scans multiple pagesPradyumna KSAinda não há avaliações
- Gear Speed PDFDocumento2 páginasGear Speed PDFPradyumna KSAinda não há avaliações
- Grid For RobotsDocumento1 páginaGrid For RobotsPradyumna KSAinda não há avaliações
- G D RaiDocumento6 páginasG D RaiPradyumna KSAinda não há avaliações
- Inci 16 BrochureDocumento24 páginasInci 16 BrochurePradyumna KSAinda não há avaliações
- Me202 Sky Assignment 1Documento5 páginasMe202 Sky Assignment 1Pradyumna KSAinda não há avaliações
- ME203 MOM July2016 Position Velo Tout01 Ver02Documento7 páginasME203 MOM July2016 Position Velo Tout01 Ver02Pradyumna KSAinda não há avaliações
- Solution Manual of Physics by Arthur BeiserDocumento145 páginasSolution Manual of Physics by Arthur BeiserManuull71% (49)
- ME203 MOM July16 IC&Acceleration Tutorial 02Documento3 páginasME203 MOM July16 IC&Acceleration Tutorial 02Pradyumna KSAinda não há avaliações
- ME203 MOM July16 IC&Acceleration Tutorial 02Documento3 páginasME203 MOM July16 IC&Acceleration Tutorial 02Pradyumna KSAinda não há avaliações
- ME203 MOM July16 IC&Acceleration Tutorial 02Documento3 páginasME203 MOM July16 IC&Acceleration Tutorial 02Pradyumna KSAinda não há avaliações
- 01 Compressors and Condensing UnitsDocumento22 páginas01 Compressors and Condensing UnitsJurhensen HoffmanAinda não há avaliações
- Axip 0057a InterDocumento62 páginasAxip 0057a InterJose MariaAinda não há avaliações
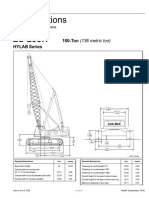
- 150 Ton Link Belt LS 238HSpecsDocumento6 páginas150 Ton Link Belt LS 238HSpecsYosses Sang Nahkoda0% (1)
- Model 40D MT Triple Mast: Parts ManualDocumento108 páginasModel 40D MT Triple Mast: Parts ManualChristian BedoyaAinda não há avaliações
- M SR 0008 PDFDocumento2 páginasM SR 0008 PDFMoh DeBrAinda não há avaliações
- Craftsman Snow BlowerDocumento44 páginasCraftsman Snow Blower85frankensteinAinda não há avaliações
- Mooney Operators Manual Model M20CDocumento96 páginasMooney Operators Manual Model M20CAngela MachillandaAinda não há avaliações
- Mefi 5 and 6 Owners ManualDocumento56 páginasMefi 5 and 6 Owners ManualGiambattista GiannoccaroAinda não há avaliações
- STANADYNE DB4627-5762 PumpDocumento4 páginasSTANADYNE DB4627-5762 Pumpmecanik.veracruzAinda não há avaliações
- Data Siemens SQL3x1 GBDocumento12 páginasData Siemens SQL3x1 GBmithilesh5103Ainda não há avaliações
- 24H Series Grader PDF Pres PDFDocumento86 páginas24H Series Grader PDF Pres PDFRulver Quiroz Cabanillas86% (7)
- L 2350 Specification SheetDocumento3 páginasL 2350 Specification SheetCristianoAinda não há avaliações
- EDL Bolt CatalogueDocumento50 páginasEDL Bolt CatalogueCY LiuAinda não há avaliações
- Quotation Bina Megah Indowood 30 HPDocumento1 páginaQuotation Bina Megah Indowood 30 HPKurniawan FebryAinda não há avaliações
- Service Bulletins Wartsila VasaDocumento5 páginasService Bulletins Wartsila VasaigorAinda não há avaliações
- Four Stroke EngineDocumento9 páginasFour Stroke Enginepawarsikander100% (3)
- Calculation of Draft ConstantDocumento10 páginasCalculation of Draft ConstantVinay Kumar Tripathi100% (4)
- Valvula TermostáticaDocumento2 páginasValvula TermostáticaSuyla CabralAinda não há avaliações
- Air Manifolds: A.S.M.E. CertifiedDocumento2 páginasAir Manifolds: A.S.M.E. CertifiedOceanexAinda não há avaliações
- Quick Return MechanismDocumento10 páginasQuick Return MechanismIshan Patel67% (3)
- Ingersol Rand-Winch H5uDocumento24 páginasIngersol Rand-Winch H5uhebert perezAinda não há avaliações
- Steam TurbineDocumento27 páginasSteam TurbinePrakashKr100% (1)
- JCB 214e Series 4 Backhoe Loader: F A S T - F A C T SDocumento8 páginasJCB 214e Series 4 Backhoe Loader: F A S T - F A C T SFanatrailer FanatrailerAinda não há avaliações
- Transmission of Motion and PowerDocumento62 páginasTransmission of Motion and PowerVishith ReddyAinda não há avaliações
- 500 - Parts Motor de HormigoneraDocumento2 páginas500 - Parts Motor de HormigoneraluismdmjAinda não há avaliações
- Bendix ABS TroubleshootingDocumento2 páginasBendix ABS TroubleshootingJeremy MartinAinda não há avaliações
- PU158TI Fire Pump Driver: Power RatingDocumento3 páginasPU158TI Fire Pump Driver: Power RatinghectorAinda não há avaliações
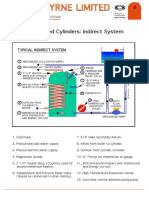
- Indirect Water Heating SystemDocumento1 páginaIndirect Water Heating Systemmerrion123Ainda não há avaliações
- C2500CBE Hydrostatic Drive-OM-EN-09Documento26 páginasC2500CBE Hydrostatic Drive-OM-EN-09ВиталийAinda não há avaliações
- Safety: Wheel Loader General SpecificationsDocumento3 páginasSafety: Wheel Loader General SpecificationsUser100% (1)