Você também pode gostar
- Computer Aided Design EENG527 Lecture Notes 01Documento23 páginasComputer Aided Design EENG527 Lecture Notes 01Alimamy KoromaAinda não há avaliações
- Table of ContentsDocumento5 páginasTable of ContentsAlimamy KoromaAinda não há avaliações
- Histogram: Bin FrequencyDocumento4 páginasHistogram: Bin FrequencyAlimamy KoromaAinda não há avaliações
- Analog and Digital Control System Design (Chi-Tsong Chen) PDFDocumento609 páginasAnalog and Digital Control System Design (Chi-Tsong Chen) PDFAlimamy Koroma50% (2)
- Model Predictive Control of A Permanent Magnet Synchronous Motor With Experimental ValidationDocumento19 páginasModel Predictive Control of A Permanent Magnet Synchronous Motor With Experimental ValidationAlimamy KoromaAinda não há avaliações
- Sensor en PDFDocumento17 páginasSensor en PDFAlimamy KoromaAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Powerpoint Presentation: Calcium Sulphate in Cement ManufactureDocumento7 páginasPowerpoint Presentation: Calcium Sulphate in Cement ManufactureDhruv PrajapatiAinda não há avaliações
- Maths PDFDocumento3 páginasMaths PDFChristina HemsworthAinda não há avaliações
- Information Security Chapter 1Documento44 páginasInformation Security Chapter 1bscitsemvAinda não há avaliações
- Abu Hamza Al Masri Wolf Notice of Compliance With SAMs AffirmationDocumento27 páginasAbu Hamza Al Masri Wolf Notice of Compliance With SAMs AffirmationPaulWolfAinda não há avaliações
- Engine Diesel PerfomanceDocumento32 páginasEngine Diesel PerfomancerizalAinda não há avaliações
- MORIGINADocumento7 páginasMORIGINAatishAinda não há avaliações
- Fake PDFDocumento2 páginasFake PDFJessicaAinda não há avaliações
- Sourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyDocumento58 páginasSourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyAlaa Al HarbiAinda não há avaliações
- An RambTel Monopole Presentation 280111Documento29 páginasAn RambTel Monopole Presentation 280111Timmy SurarsoAinda não há avaliações
- HRO (TOOLS 6-9) : Tool 6: My Family and My Career ChoicesDocumento6 páginasHRO (TOOLS 6-9) : Tool 6: My Family and My Career ChoicesAkosi EtutsAinda não há avaliações
- Lea 4Documento36 páginasLea 4Divina DugaoAinda não há avaliações
- Introduction To Motor DrivesDocumento24 páginasIntroduction To Motor Drivessukhbat sodnomdorjAinda não há avaliações
- Employees' Pension Scheme, 1995: Form No. 10 C (E.P.S)Documento4 páginasEmployees' Pension Scheme, 1995: Form No. 10 C (E.P.S)nasir ahmedAinda não há avaliações
- Form16 2018 2019Documento10 páginasForm16 2018 2019LogeshwaranAinda não há avaliações
- Selvan CVDocumento4 páginasSelvan CVsuman_civilAinda não há avaliações
- Dissertation On Indian Constitutional LawDocumento6 páginasDissertation On Indian Constitutional LawCustomPaperWritingAnnArbor100% (1)
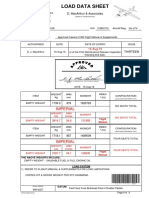
- Load Data Sheet: ImperialDocumento3 páginasLoad Data Sheet: ImperialLaurean Cub BlankAinda não há avaliações
- Micron Interview Questions Summary # Question 1 Parsing The HTML WebpagesDocumento2 páginasMicron Interview Questions Summary # Question 1 Parsing The HTML WebpagesKartik SharmaAinda não há avaliações
- COOKERY10 Q2W4 10p LATOJA SPTVEDocumento10 páginasCOOKERY10 Q2W4 10p LATOJA SPTVECritt GogolinAinda não há avaliações
- The Electricity Act - 2003Documento84 páginasThe Electricity Act - 2003Anshul PandeyAinda não há avaliações
- Basic DfwmacDocumento6 páginasBasic DfwmacDinesh Kumar PAinda não há avaliações
- Allan ToddDocumento28 páginasAllan ToddBilly SorianoAinda não há avaliações
- Engineering Management (Final Exam)Documento2 páginasEngineering Management (Final Exam)Efryl Ann de GuzmanAinda não há avaliações
- Material Safety Data Sheet (According To 91/155 EC)Documento4 páginasMaterial Safety Data Sheet (According To 91/155 EC)Jaymit PatelAinda não há avaliações
- Group 1 Disaster Management Notes by D. Malleswari ReddyDocumento49 páginasGroup 1 Disaster Management Notes by D. Malleswari Reddyraghu ramAinda não há avaliações
- 4109 CPC For ExamDocumento380 páginas4109 CPC For ExamMMM-2012Ainda não há avaliações
- SCDT0315 PDFDocumento80 páginasSCDT0315 PDFGCMediaAinda não há avaliações
- QA/QC Checklist - Installation of MDB Panel BoardsDocumento6 páginasQA/QC Checklist - Installation of MDB Panel Boardsehtesham100% (1)
- CA Inter Group 1 Book November 2021Documento251 páginasCA Inter Group 1 Book November 2021VISHAL100% (2)
- Arduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash GuptaDocumento3 páginasArduino Based Voice Controlled Robot: Aditya Chaudhry, Manas Batra, Prakhar Gupta, Sahil Lamba, Suyash Guptaabhishek kumarAinda não há avaliações