Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Aleksandrov I Dis 1-50.ru - enDocumento50 páginasAleksandrov I Dis 1-50.ru - enNabeel AdilAinda não há avaliações
- Gods Omnipresence in The World On Possible MeaninDocumento20 páginasGods Omnipresence in The World On Possible MeaninJoan Amanci Casas MuñozAinda não há avaliações
- Talking Art As The Spirit Moves UsDocumento7 páginasTalking Art As The Spirit Moves UsUCLA_SPARCAinda não há avaliações
- SSGC-RSGLEG Draft Study On The Applicability of IAL To Cyber Threats Against Civil AviationDocumento41 páginasSSGC-RSGLEG Draft Study On The Applicability of IAL To Cyber Threats Against Civil AviationPrachita AgrawalAinda não há avaliações
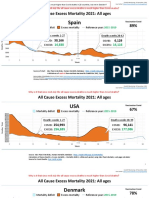
- Countries EXCESS DEATHS All Ages - 15nov2021Documento21 páginasCountries EXCESS DEATHS All Ages - 15nov2021robaksAinda não há avaliações
- ISBN Safe Work Method Statements 2022 03Documento8 páginasISBN Safe Work Method Statements 2022 03Tamo Kim ChowAinda não há avaliações
- Anatomy Anal CanalDocumento14 páginasAnatomy Anal CanalBela Ronaldoe100% (1)
- NDY 9332v3Documento8 páginasNDY 9332v3sulphurdioxideAinda não há avaliações
- WebLMT HelpDocumento12 páginasWebLMT HelpJoão LopesAinda não há avaliações
- 13 Adsorption of Congo Red A Basic Dye by ZnFe-CO3Documento10 páginas13 Adsorption of Congo Red A Basic Dye by ZnFe-CO3Jorellie PetalverAinda não há avaliações
- FDA Approves First Gene Therapy, Betibeglogene Autotemcel (Zynteglo), For Beta-ThalassemiaDocumento3 páginasFDA Approves First Gene Therapy, Betibeglogene Autotemcel (Zynteglo), For Beta-ThalassemiaGiorgi PopiashviliAinda não há avaliações
- From Philo To Plotinus AftermanDocumento21 páginasFrom Philo To Plotinus AftermanRaphael888Ainda não há avaliações
- Law of EvidenceDocumento14 páginasLaw of EvidenceIsha ChavanAinda não há avaliações
- Principals' Leadership Styles and Student Academic Performance in Secondary Schools in Ekiti State, NigeriaDocumento12 páginasPrincipals' Leadership Styles and Student Academic Performance in Secondary Schools in Ekiti State, NigeriaiqraAinda não há avaliações
- German Atv-Dvwk Rules and StandardsDocumento25 páginasGerman Atv-Dvwk Rules and StandardsMehmet Emre Bastopcu100% (1)
- Business Plan 3.3Documento2 páginasBusiness Plan 3.3Rojin TingabngabAinda não há avaliações
- DQ Vibro SifterDocumento13 páginasDQ Vibro SifterDhaval Chapla67% (3)
- Huawei R4815N1 DatasheetDocumento2 páginasHuawei R4815N1 DatasheetBysAinda não há avaliações
- The Magic DrumDocumento185 páginasThe Magic Drumtanishgiri2012Ainda não há avaliações
- An Exploration of The Ethno-Medicinal Practices Among Traditional Healers in Southwest Cebu, PhilippinesDocumento7 páginasAn Exploration of The Ethno-Medicinal Practices Among Traditional Healers in Southwest Cebu, PhilippinesleecubongAinda não há avaliações
- Crown WF-3000 1.2Documento5 páginasCrown WF-3000 1.2Qirat KhanAinda não há avaliações
- 3 Carbohydrates' StructureDocumento33 páginas3 Carbohydrates' StructureDilan TeodoroAinda não há avaliações
- The Mantel Colonized Nation Somalia 10 PDFDocumento5 páginasThe Mantel Colonized Nation Somalia 10 PDFAhmad AbrahamAinda não há avaliações
- Heterogeneity in Macroeconomics: Macroeconomic Theory II (ECO-504) - Spring 2018Documento5 páginasHeterogeneity in Macroeconomics: Macroeconomic Theory II (ECO-504) - Spring 2018Gabriel RoblesAinda não há avaliações
- PR KehumasanDocumento14 páginasPR KehumasanImamAinda não há avaliações
- Ricoh IM C2000 IM C2500: Full Colour Multi Function PrinterDocumento4 páginasRicoh IM C2000 IM C2500: Full Colour Multi Function PrinterKothapalli ChiranjeeviAinda não há avaliações
- FM 2030Documento18 páginasFM 2030renaissancesamAinda não há avaliações
- Retailing in IndiaDocumento11 páginasRetailing in IndiaVinod MalkarAinda não há avaliações
- CAT 320D2: Hydraulic ExcavatorDocumento5 páginasCAT 320D2: Hydraulic Excavatorhydeer 13Ainda não há avaliações
- Problem Set-02Documento2 páginasProblem Set-02linn.pa.pa.khaing.2020.2021.fbAinda não há avaliações