Você também pode gostar
- Ashrae ChartDocumento2 páginasAshrae ChartHanis KamaruddinAinda não há avaliações
- Pumping TechnologyDocumento25 páginasPumping TechnologyHanis Kamaruddin100% (1)
- Air Cooled Heat ExchangerDocumento26 páginasAir Cooled Heat ExchangerMagesh Kumar90% (10)
- Riser Concept For Ultra Deepwater ConditionDocumento197 páginasRiser Concept For Ultra Deepwater ConditionHanis KamaruddinAinda não há avaliações
- Evaluation On The Effect of Contact Between Riser and Guide FrameDocumento244 páginasEvaluation On The Effect of Contact Between Riser and Guide FrameHanis KamaruddinAinda não há avaliações
- SEVAN Cylindrical FPSODocumento388 páginasSEVAN Cylindrical FPSOHanis Kamaruddin100% (2)
- Wish List PlacesDocumento2 páginasWish List PlacesHanis KamaruddinAinda não há avaliações
- Paper Torsional Vibration Calculation Issues With Propulsion SystemsDocumento38 páginasPaper Torsional Vibration Calculation Issues With Propulsion Systemsgatheringforgardner9550Ainda não há avaliações
- Safety of Offshore Structures PDFDocumento46 páginasSafety of Offshore Structures PDFAnonymous IwqK1NlAinda não há avaliações
- An Experimental Study of The Effect of Mooring Systems On The Dynamics of A SPAR Bouy-Type Floating Offshore Wind TurbineDocumento21 páginasAn Experimental Study of The Effect of Mooring Systems On The Dynamics of A SPAR Bouy-Type Floating Offshore Wind TurbineHanis KamaruddinAinda não há avaliações
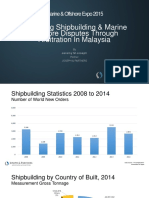
- Resolving Shipbuilding & Marine Offshore Disputes Through Arbitration in MalaysiaDocumento30 páginasResolving Shipbuilding & Marine Offshore Disputes Through Arbitration in MalaysiaHanis KamaruddinAinda não há avaliações
- A Comparative Study of The Monitoring of A Self Aligning Spherical Journal Using Surface Vibration, Airborne Sound and Acoustic EmissionDocumento14 páginasA Comparative Study of The Monitoring of A Self Aligning Spherical Journal Using Surface Vibration, Airborne Sound and Acoustic EmissionHanis KamaruddinAinda não há avaliações
- Chapter 1 ExergyDocumento36 páginasChapter 1 ExergyHanis KamaruddinAinda não há avaliações
- Chapter 2 Gas Power CycleDocumento22 páginasChapter 2 Gas Power CycleHanis Kamaruddin100% (1)
- Vibration Analysis of Rotating Machinery Using Time Frequency Analysis and Wavelet TechniquesDocumento19 páginasVibration Analysis of Rotating Machinery Using Time Frequency Analysis and Wavelet TechniquesHanis KamaruddinAinda não há avaliações
- Assignment 1 SolutionDocumento17 páginasAssignment 1 SolutionHanis KamaruddinAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Final Jee-Main Examination - August, 2021: Physics Test Paper With SolutionDocumento25 páginasFinal Jee-Main Examination - August, 2021: Physics Test Paper With SolutionFIESTA MUSICAinda não há avaliações
- CV - Gaurav BahlDocumento17 páginasCV - Gaurav BahlTanveerAinda não há avaliações
- Physics of The Guitar at The Helmholtz and First Top-Plate ResonancesDocumento6 páginasPhysics of The Guitar at The Helmholtz and First Top-Plate ResonancesHenrique GabrielAinda não há avaliações
- Institute of Aeronautical EngineeringDocumento32 páginasInstitute of Aeronautical Engineeringrashmitha chigullapallyAinda não há avaliações
- Chapter 4 Vibration and WaveDocumento30 páginasChapter 4 Vibration and WavePrakash DuraisamyAinda não há avaliações
- Electron Paramagnetic Resonance A Practitioners ToolkitDocumento58 páginasElectron Paramagnetic Resonance A Practitioners ToolkitarkaAinda não há avaliações
- IEEE White Paper Capacitor Application IssuesDocumento14 páginasIEEE White Paper Capacitor Application IssuesVenkat DegaAinda não há avaliações
- Mosfet NanowireDocumento5 páginasMosfet NanowireftahAinda não há avaliações
- 8.1 Resonance and Non Sinusoidal Waves QuestionsDocumento1 página8.1 Resonance and Non Sinusoidal Waves QuestionsJayson Bryan MutucAinda não há avaliações
- A Method To Design Vibratory Bowl Feeder by UsingDocumento10 páginasA Method To Design Vibratory Bowl Feeder by Usingأحمد عاطف أبوغديرAinda não há avaliações
- 336-Dimensioning and Design of Fans For Elevated Pressure IncreasesDocumento8 páginas336-Dimensioning and Design of Fans For Elevated Pressure IncreasesNaavin Muthu KrishnanAinda não há avaliações
- A Comprehensive Text Book of Applied PhysicsDocumento259 páginasA Comprehensive Text Book of Applied PhysicsSilvio Luiz Rutz Da Silva50% (2)
- Vibration Analysis of Rolling BearingsDocumento99 páginasVibration Analysis of Rolling BearingsDaniel_Ali_bAinda não há avaliações
- Foundation Courses: Available HereDocumento33 páginasFoundation Courses: Available HerepkhsuAinda não há avaliações
- Dual Channel Phase - Crest Factor-Cascade-Run Up - LORDocumento5 páginasDual Channel Phase - Crest Factor-Cascade-Run Up - LORMohd Asiren Mohd SharifAinda não há avaliações
- Oscillator CircuitsDocumento19 páginasOscillator Circuits21-08523Ainda não há avaliações
- Noise Analysis and Control On Motor Starting and Accelerating of Electric BusDocumento7 páginasNoise Analysis and Control On Motor Starting and Accelerating of Electric BusPhil's ChannelAinda não há avaliações
- Fan 7711Documento21 páginasFan 7711uumpAinda não há avaliações
- PREM For TenderDocumento382 páginasPREM For Tenderthongchai_007100% (1)
- Performance Enhancement of Capacitive-Type Torque Sensor by Using Resonant CircuitDocumento10 páginasPerformance Enhancement of Capacitive-Type Torque Sensor by Using Resonant CircuitM. T.Ainda não há avaliações
- Perforated Plate DesignerDocumento124 páginasPerforated Plate DesignersurawutwijarnAinda não há avaliações
- Harman / Kardon: Loudspeakers and Rooms For Multichannel Audio ReproductionDocumento33 páginasHarman / Kardon: Loudspeakers and Rooms For Multichannel Audio ReproductionErling SanchezAinda não há avaliações
- Final Lab Report General Physics III LaboratoryDocumento6 páginasFinal Lab Report General Physics III LaboratoryMuhammad FauzanilAinda não há avaliações
- Dynamic Analysis of Railway Bridges Using The Mode Superposition MethodDocumento110 páginasDynamic Analysis of Railway Bridges Using The Mode Superposition MethodbiomechanicsAinda não há avaliações
- Acu TonicsDocumento13 páginasAcu TonicsCarlo Damião100% (3)
- Cummings 1978Documento19 páginasCummings 1978Carlos GuerraAinda não há avaliações
- Review of Pedestrian Load Models for Vibration Serviceability AssessmentDocumento24 páginasReview of Pedestrian Load Models for Vibration Serviceability AssessmentBelen Mustafa - SucreAinda não há avaliações
- Dynamic Vibration AbsorberDocumento67 páginasDynamic Vibration AbsorberKULDEEP THAKUR71% (7)
- Introduction To The Mathematical Nonlinear Wave MotionDocumento157 páginasIntroduction To The Mathematical Nonlinear Wave Motionmehr1384Ainda não há avaliações