Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
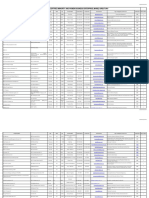
- City of Syracuse Certified Minority and Women Business Enterprise (Mwbe) DirectoryDocumento7 páginasCity of Syracuse Certified Minority and Women Business Enterprise (Mwbe) DirectorycyrixenigmaAinda não há avaliações
- EPRI Power System Dynamics TutorialDocumento1.010 páginasEPRI Power System Dynamics TutorialSzabina100% (1)
- Berti 1Documento20 páginasBerti 1cyrixenigmaAinda não há avaliações
- Aχ time-frequency discriminator for gravitational wave detectionDocumento21 páginasAχ time-frequency discriminator for gravitational wave detectioncyrixenigmaAinda não há avaliações
- Fastest-Growing Private CompaniesDocumento12 páginasFastest-Growing Private CompaniescyrixenigmaAinda não há avaliações
- Math 110 HomeworkDocumento4 páginasMath 110 HomeworkcyrixenigmaAinda não há avaliações
- Vp0104 Vp0106 Vp0109 P-Channel Enhancement-Mode Vertical Dmos FetsDocumento4 páginasVp0104 Vp0106 Vp0109 P-Channel Enhancement-Mode Vertical Dmos FetsGabriel RacovskyAinda não há avaliações
- Sunpal 48V Lithium BatteryDocumento2 páginasSunpal 48V Lithium BatteryGeorge BillingAinda não há avaliações
- ABB - ACS880-37 - Hardware Manual 160-3200kWDocumento278 páginasABB - ACS880-37 - Hardware Manual 160-3200kWLuisAinda não há avaliações
- Esquema Schematic TV LG - 42LG60frDocumento25 páginasEsquema Schematic TV LG - 42LG60frDjjserver BrAinda não há avaliações
- Freelander 1 NAS MY04 - Electrical LibraryDocumento629 páginasFreelander 1 NAS MY04 - Electrical LibraryWan SaulAinda não há avaliações
- Damping Model of Traveling Waves Corona Effect Along Extra High Voltage Three Phase LinesDocumento11 páginasDamping Model of Traveling Waves Corona Effect Along Extra High Voltage Three Phase LinesاغريسةAinda não há avaliações
- Differential Equations - Elementary Applications of ODE PDFDocumento41 páginasDifferential Equations - Elementary Applications of ODE PDFBob BlohAinda não há avaliações
- SJSU EE288 Lecture22 OPAMP For ADCDocumento40 páginasSJSU EE288 Lecture22 OPAMP For ADCTING LEE100% (1)
- Samsung LN32D550K1FXZA - Fast - Track - Troubleshooting ManualDocumento4 páginasSamsung LN32D550K1FXZA - Fast - Track - Troubleshooting ManualArieskaAinda não há avaliações
- Silicon NPN Triple Diffused: ApplicationDocumento6 páginasSilicon NPN Triple Diffused: ApplicationLenyaM33Ainda não há avaliações
- M800 BrochureDocumento2 páginasM800 BrochureDaymar GarciaAinda não há avaliações
- FTDI Chip: USB SolutionsDocumento20 páginasFTDI Chip: USB SolutionsPaloma Sousa100% (1)
- Delhi Schedule of Rates E&M - 2014Documento104 páginasDelhi Schedule of Rates E&M - 2014Jaisree Balu Pydi86% (7)
- Magneti RefrigerationDocumento25 páginasMagneti Refrigerationagastyadk100% (2)
- Lec29 - 32 - FET Application PDFDocumento86 páginasLec29 - 32 - FET Application PDFRichard ParkerAinda não há avaliações
- Westermo Ds md-45 PDFDocumento2 páginasWestermo Ds md-45 PDFPablo TeránAinda não há avaliações
- Electrical Engineering EE PGCET Question BankDocumento230 páginasElectrical Engineering EE PGCET Question Bankirfan100% (1)
- ONS Sample Question PaperDocumento4 páginasONS Sample Question PaperRaashidAinda não há avaliações
- Deltalite II 2510-4: Neodymium SeriesDocumento2 páginasDeltalite II 2510-4: Neodymium SeriesAji VerdeAinda não há avaliações
- 5 Section V SJVN Technical Specification Rev 1 PDFDocumento195 páginas5 Section V SJVN Technical Specification Rev 1 PDFANANDAinda não há avaliações
- High Voltage Cable Distance ProtectionDocumento9 páginasHigh Voltage Cable Distance ProtectionAbdulyunus Amir100% (1)
- Premold JointDocumento6 páginasPremold JointbenwkgAinda não há avaliações
- Bill of Materials - HARDWAREDocumento4 páginasBill of Materials - HARDWARERoxelle ImperialAinda não há avaliações
- Valtra T190 Ecu - 221006 - 074310Documento3 páginasValtra T190 Ecu - 221006 - 074310Andres PulkAinda não há avaliações
- Lecture Plan BE 8253 AutoDocumento6 páginasLecture Plan BE 8253 Autoboomadev6321Ainda não há avaliações
- Sirius 3 ManualDocumento22 páginasSirius 3 Manual'Egemen KayaAinda não há avaliações
- Manual de Instalare Cititor de Proximitate Stand Alone Cu Tastatura K1Documento1 páginaManual de Instalare Cititor de Proximitate Stand Alone Cu Tastatura K1AlinutaAinda não há avaliações
- Impedance Correction FactorDocumento7 páginasImpedance Correction FactorEngr Fahimuddin QureshiAinda não há avaliações
- Carrier Inverter Cassette XPower 42QTD - Brochure EN PDFDocumento5 páginasCarrier Inverter Cassette XPower 42QTD - Brochure EN PDFMahmudul Hasan TanuAinda não há avaliações