Você também pode gostar
- New DocncghchgcDocumento9 páginasNew Docncghchgcjay11493Ainda não há avaliações
- GDGDHFJJGDocumento7 páginasGDGDHFJJGjay11493Ainda não há avaliações
- Offer Your Prayers and Go For A Morning WalkDocumento2 páginasOffer Your Prayers and Go For A Morning Walkjay11493Ainda não há avaliações
- Annexur EII Affidavit by The Parent / GuardianDocumento2 páginasAnnexur EII Affidavit by The Parent / Guardianjay11493Ainda não há avaliações
- Linux Commands: Name: Nisarg Shah Registration No: 16MES0057 Worksheet-1Documento4 páginasLinux Commands: Name: Nisarg Shah Registration No: 16MES0057 Worksheet-1jay11493Ainda não há avaliações
- SLLLLLDocumento1 páginaSLLLLLjay11493Ainda não há avaliações
- 11 Apr 1993 Male GEN No: Communication Address GATE Exam DetailsDocumento1 página11 Apr 1993 Male GEN No: Communication Address GATE Exam Detailsjay11493Ainda não há avaliações
- Wa0005 PDFDocumento2 páginasWa0005 PDFsrinivasanAinda não há avaliações
- Neerav Gate AppnDocumento1 páginaNeerav Gate Appnjay11493Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Story Brace Station P V2 V3 T M Tonf Tonf Tonf Tonf-M Load Case/ComboDocumento12 páginasStory Brace Station P V2 V3 T M Tonf Tonf Tonf Tonf-M Load Case/CombofunkytumadreAinda não há avaliações
- Hansen 161Documento9 páginasHansen 161grude grudeAinda não há avaliações
- Play 1b4Documento176 páginasPlay 1b4mpollinni100% (1)
- Google 2035Documento56 páginasGoogle 2035Kadir KARACETIN100% (5)
- LaTeX - Chess NotesDocumento36 páginasLaTeX - Chess Notesblahgz100% (1)
- MBKHP 2012 Inkhawmpui ProgrammeDocumento6 páginasMBKHP 2012 Inkhawmpui ProgrammeHlima RalteAinda não há avaliações
- Dutch Stonewall - Jacob AagaardDocumento162 páginasDutch Stonewall - Jacob AagaardGustalchess Gustalchess100% (2)
- 4-String Chord Dictionary Bass Tabs - Bass Lessons at BigBassTabsDocumento1 página4-String Chord Dictionary Bass Tabs - Bass Lessons at BigBassTabsLouis MiglioreAinda não há avaliações
- Mate in 3moves Sol PDFDocumento124 páginasMate in 3moves Sol PDFwhite greenAinda não há avaliações
- Sicilian Dragon Level 5Documento12 páginasSicilian Dragon Level 5MarcelloAinda não há avaliações
- PDF 05Documento3 páginasPDF 053187265100% (1)
- Ajustar Presion de Cabezal Zebra ZM400Documento3 páginasAjustar Presion de Cabezal Zebra ZM400Emerson FloresAinda não há avaliações
- Schiller - How To Play The Scotch Gambit (1992)Documento127 páginasSchiller - How To Play The Scotch Gambit (1992)Bill CroweAinda não há avaliações
- Winning With The Dragon - Ward (1994)Documento213 páginasWinning With The Dragon - Ward (1994)karchecov100% (6)
- Orange Crush 20l Guitar Amp SCH PDFDocumento1 páginaOrange Crush 20l Guitar Amp SCH PDFToto WaltherAinda não há avaliações
- CentrecounterDocumento25 páginasCentrecounterapi-272755084100% (1)
- The 6. g5 Najdorf: What's Hot and What's Not?Documento4 páginasThe 6. g5 Najdorf: What's Hot and What's Not?jogonAinda não há avaliações
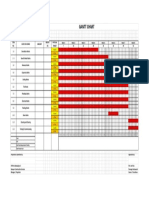
- Gantt Chart DEMOLITION & CONSTRUCTION WORKS 8weeks 2.0Documento1 páginaGantt Chart DEMOLITION & CONSTRUCTION WORKS 8weeks 2.0earvin serenoAinda não há avaliações
- SOS Secrets of Opening Surprises. Volume 4Documento148 páginasSOS Secrets of Opening Surprises. Volume 4hendra setiawanAinda não há avaliações
- Spassky-Lombardy, World Under-26 Team-Ch, Leningrad 1960Documento3 páginasSpassky-Lombardy, World Under-26 Team-Ch, Leningrad 1960Douglas GriffinAinda não há avaliações
- The Scandinavian Defense-Course SummaryDocumento33 páginasThe Scandinavian Defense-Course SummaryArman Siddique100% (1)
- Pal BenkoDocumento4 páginasPal BenkoKartik ShroffAinda não há avaliações
- Black Sabbath - Iron ManDocumento7 páginasBlack Sabbath - Iron Manrodrigo sobralAinda não há avaliações
- ST John Ambulans Kuiz ADocumento6 páginasST John Ambulans Kuiz AKelvin BCAinda não há avaliações
- Garry Kasparov - London-Leningrad Championship GamesDocumento143 páginasGarry Kasparov - London-Leningrad Championship GamesDario R100% (1)
- Noël Blanc Harmonisé: VincentDocumento2 páginasNoël Blanc Harmonisé: VincentCompagnie MUSIDRAMAAinda não há avaliações
- Sheetv 1Documento68 páginasSheetv 1Kenedi LopezAinda não há avaliações
- 2Documento46 páginas2Jon FerdzAinda não há avaliações
- Fuelino p4 SchematicsDocumento1 páginaFuelino p4 SchematicsAhmad Azriel DaffarisandiAinda não há avaliações
- Epson WF C5790 WF C5790A WF C5710 ET 8700 WF C5210 WF C5290 WF C5290A Service Manuals 251 300Documento50 páginasEpson WF C5790 WF C5790A WF C5710 ET 8700 WF C5210 WF C5290 WF C5290A Service Manuals 251 300조장현Ainda não há avaliações