Você também pode gostar
- BEAM DIAGRAMS AND FORMULAS For Various Static Loading Conditions, AISC ASD 8 EdDocumento7 páginasBEAM DIAGRAMS AND FORMULAS For Various Static Loading Conditions, AISC ASD 8 EdEdon MorinaAinda não há avaliações
- HW3 PDFDocumento2 páginasHW3 PDFrightheartedAinda não há avaliações
- AN00131 - USB CDC ECM Class For Ethernet Over USB - 2.0.2rc1 PDFDocumento31 páginasAN00131 - USB CDC ECM Class For Ethernet Over USB - 2.0.2rc1 PDFrightheartedAinda não há avaliações
- hw1 PDFDocumento6 páginashw1 PDFrightheartedAinda não há avaliações
- HW5 PDFDocumento1 páginaHW5 PDFrightheartedAinda não há avaliações
- Root Locus: ROBT303 Linear Control Theory With LabDocumento28 páginasRoot Locus: ROBT303 Linear Control Theory With LabrightheartedAinda não há avaliações
- Robt303 HW3 PDFDocumento1 páginaRobt303 HW3 PDFrightheartedAinda não há avaliações
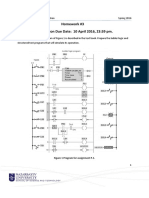
- ROBT308HW03Spring16 PDFDocumento7 páginasROBT308HW03Spring16 PDFrightheartedAinda não há avaliações
- Root Locus: ROBT303 Linear Control Theory With LabDocumento38 páginasRoot Locus: ROBT303 Linear Control Theory With LabrightheartedAinda não há avaliações
- Robt401 Manipulator Kinematics FINAL PDFDocumento50 páginasRobt401 Manipulator Kinematics FINAL PDFrightheartedAinda não há avaliações
- Robt401 Manipulator Kinematics FINAL PDFDocumento50 páginasRobt401 Manipulator Kinematics FINAL PDFrightheartedAinda não há avaliações
- Robt304 Project Report PDFDocumento13 páginasRobt304 Project Report PDFrightheartedAinda não há avaliações
- ROBT308Lecture22Spring16 PDFDocumento52 páginasROBT308Lecture22Spring16 PDFrightheartedAinda não há avaliações
- ROBT308Lecture24Spring16 PDFDocumento28 páginasROBT308Lecture24Spring16 PDFrightheartedAinda não há avaliações
- Learning From Data Solutions To Selected Exercises: N N M J J N 2Documento4 páginasLearning From Data Solutions To Selected Exercises: N N M J J N 2rightheartedAinda não há avaliações
- 1: The Learning ProblemDocumento27 páginas1: The Learning ProblemrightheartedAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- HCI Course Outlines SEDocumento3 páginasHCI Course Outlines SEZubair AhmedAinda não há avaliações
- 1/116 Image SegmentationDocumento120 páginas1/116 Image SegmentationAnanya DasAinda não há avaliações
- Artificial IntelligenceDocumento17 páginasArtificial IntelligenceAive Marist ObsiomaAinda não há avaliações
- Me 471 Closed Loop Hydraulic Positioning SystemDocumento4 páginasMe 471 Closed Loop Hydraulic Positioning SystemAbhishek KumbalurAinda não há avaliações
- POM Assignment 4 GIM123Documento11 páginasPOM Assignment 4 GIM123shivaniAinda não há avaliações
- Notions of SemioticDocumento3 páginasNotions of SemioticEditya NovridianAinda não há avaliações
- BD-Practice Questions-AutDocumento3 páginasBD-Practice Questions-AutSuman PanditAinda não há avaliações
- BDC Previous Papers 2 MarksDocumento7 páginasBDC Previous Papers 2 MarksRoshan Mallipeddi100% (1)
- Machine Learning Unit Wise Important QuestionsDocumento2 páginasMachine Learning Unit Wise Important Questionsprashanth kumarAinda não há avaliações
- Digital Image Processing Lab File ECS-752: Shree Bankey Bihari Institute of Technology (SB-BIT) - MeerutDocumento39 páginasDigital Image Processing Lab File ECS-752: Shree Bankey Bihari Institute of Technology (SB-BIT) - MeerutBhavana TanwarAinda não há avaliações
- Recent Advancements in The Field of Deepfake DetectionDocumento11 páginasRecent Advancements in The Field of Deepfake DetectionAnonymous Gl4IRRjzNAinda não há avaliações
- Excel For Data AnalysisDocumento14 páginasExcel For Data AnalysisSelvi balanAinda não há avaliações
- Implementing Logic Gates Using Neural Networks (Part 2) - by Vedant Kumar - Towards Data ScienceDocumento3 páginasImplementing Logic Gates Using Neural Networks (Part 2) - by Vedant Kumar - Towards Data Sciencehelen leeAinda não há avaliações
- Chapter 5-8 of The Intruduction To Information System TestbankDocumento51 páginasChapter 5-8 of The Intruduction To Information System TestbankandispotifyaccAinda não há avaliações
- Stability of Non Autonomous SystemsDocumento4 páginasStability of Non Autonomous SystemsvanalexbluesAinda não há avaliações
- Colorful Organic Child Psychology PresentationDocumento10 páginasColorful Organic Child Psychology PresentationChaima Ahmed GaidAinda não há avaliações
- Handbook of Heating, Ventilation and Air Conditioning - Jan F. KreiderDocumento10 páginasHandbook of Heating, Ventilation and Air Conditioning - Jan F. Kreidermichell152011152011Ainda não há avaliações
- CS403 IMP Short NotesDocumento88 páginasCS403 IMP Short NotesinaamAinda não há avaliações
- a-GIST CNNs Quicksummary HyungukDocumento25 páginasa-GIST CNNs Quicksummary Hyunguk최희욱Ainda não há avaliações
- Vetrivendan.L Publication1Documento5 páginasVetrivendan.L Publication1SonyAinda não há avaliações
- Reduction of Multiple SubsystemsDocumento38 páginasReduction of Multiple SubsystemsattayyabkhanAinda não há avaliações
- Data Science Learning PlanDocumento3 páginasData Science Learning PlansuprabhattAinda não há avaliações
- Data Independence & Database LanguagesDocumento5 páginasData Independence & Database Languages2002746.it.cecAinda não há avaliações
- CE QB - All Units PDFDocumento38 páginasCE QB - All Units PDFkurian georgeAinda não há avaliações
- Aphasia ChecklistDocumento2 páginasAphasia Checklistelisa.dreosto1228Ainda não há avaliações
- Data Mining Techniques in Smart AgricultureDocumento6 páginasData Mining Techniques in Smart AgricultureVIVA-TECH IJRIAinda não há avaliações
- Minggu04 - Convolutional Neural Network (CNN)Documento55 páginasMinggu04 - Convolutional Neural Network (CNN)Terves AlexanderAinda não há avaliações
- Market Basket AnalysisDocumento11 páginasMarket Basket Analysisabhilashponnam@gmail.comAinda não há avaliações
- Humss 4 TrendsDocumento21 páginasHumss 4 Trendsme btchAinda não há avaliações
- Performance of P-Only, PI and PID ControllersDocumento21 páginasPerformance of P-Only, PI and PID ControllersantavenaAinda não há avaliações