Você também pode gostar
- Bananafish - J.D Salinger PDFDocumento7 páginasBananafish - J.D Salinger PDFPema75% (4)
- An Introduction To R: W. N. Venables, D. M. Smith and The R Core TeamDocumento105 páginasAn Introduction To R: W. N. Venables, D. M. Smith and The R Core TeamMahadiAinda não há avaliações
- BQC Quiz SessionDocumento254 páginasBQC Quiz SessionAbhay VikramAinda não há avaliações
- BAQC Quiz SessionDocumento314 páginasBAQC Quiz SessionAbhay VikramAinda não há avaliações
- Student Timeline FAQsDocumento2 páginasStudent Timeline FAQsAbhay VikramAinda não há avaliações
- Research Methods in Urban Science (US 603) : Lecture #3: Population Projections (Cont'd) 13 January 2018Documento38 páginasResearch Methods in Urban Science (US 603) : Lecture #3: Population Projections (Cont'd) 13 January 2018Abhay VikramAinda não há avaliações
- FDR 2019 20 - V2Documento1 páginaFDR 2019 20 - V2masdede95Ainda não há avaliações
- Learners LicenceDocumento2 páginasLearners LicenceN Rakesh83% (6)
- Lecture Series 5 Runoff and StreamflowDocumento118 páginasLecture Series 5 Runoff and StreamflowAbhay VikramAinda não há avaliações
- Ryunosuke Akutagawa: in A GroveDocumento7 páginasRyunosuke Akutagawa: in A GroveAbhay VikramAinda não há avaliações
- Assignment 5 - Heathrow Terminal 5 Case StudyDocumento3 páginasAssignment 5 - Heathrow Terminal 5 Case StudyAbhay Vikram0% (1)
- Lecture Series 2 - PrecipitationDocumento126 páginasLecture Series 2 - PrecipitationAbhay VikramAinda não há avaliações
- Lecture Series 1 - IntroductionDocumento50 páginasLecture Series 1 - IntroductionAbhay VikramAinda não há avaliações
- 17 7 2017Documento34 páginas17 7 2017Abhay VikramAinda não há avaliações
- L2 Structural Steel: CE 332: Structural Design IIDocumento6 páginasL2 Structural Steel: CE 332: Structural Design IIAbhay VikramAinda não há avaliações
- Nptel ceTEI L05Documento4 páginasNptel ceTEI L05Mona Abu HamdAinda não há avaliações
- Applied Hydrology Chow 1988 PDFDocumento294 páginasApplied Hydrology Chow 1988 PDFAbhay VikramAinda não há avaliações
- Practice Problems SI-SolutionDocumento8 páginasPractice Problems SI-SolutionAbhay Vikram0% (1)
- Intro To Transportation Planning For MoodleDocumento14 páginasIntro To Transportation Planning For MoodleAbhay VikramAinda não há avaliações
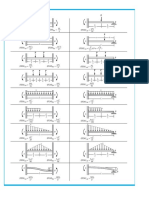
- EndMoments PDFDocumento1 páginaEndMoments PDFAbhay VikramAinda não há avaliações
- Approximate MethodsDocumento86 páginasApproximate MethodsAbhay Vikram100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- E 18 - 02 - Rte4ltay PDFDocumento16 páginasE 18 - 02 - Rte4ltay PDFvinoth kumar SanthanamAinda não há avaliações
- Mathematicaleconomics PDFDocumento84 páginasMathematicaleconomics PDFSayyid JifriAinda não há avaliações
- American RunwayDocumento26 páginasAmerican RunwayGayathri SuriyaAinda não há avaliações
- 7 - LESSON PLAN CULTURAL HERITAGE AND CULTURAL DIVERSITY - Lesson PlanDocumento4 páginas7 - LESSON PLAN CULTURAL HERITAGE AND CULTURAL DIVERSITY - Lesson PlanRute SobralAinda não há avaliações
- Welcome To The Jfrog Artifactory User Guide!Documento3 páginasWelcome To The Jfrog Artifactory User Guide!RaviAinda não há avaliações
- Task Basis JurisprudenceDocumento10 páginasTask Basis JurisprudenceKerwin LeonidaAinda não há avaliações
- TLS FinalDocumento69 páginasTLS FinalGrace Arthur100% (1)
- Man Is Made by His BeliefDocumento2 páginasMan Is Made by His BeliefLisa KireechevaAinda não há avaliações
- Baltimore Catechism No. 2 (Of 4)Documento64 páginasBaltimore Catechism No. 2 (Of 4)gogelAinda não há avaliações
- Tamil Ilakkanam Books For TNPSCDocumento113 páginasTamil Ilakkanam Books For TNPSCkk_kamalakkannan100% (1)
- 2022BusinessManagement ReportDocumento17 páginas2022BusinessManagement ReportkianaAinda não há avaliações
- Filipino HousesDocumento4 páginasFilipino HousesjackAinda não há avaliações
- Habanera Botolena & Carinosa (Gas-A)Documento8 páginasHabanera Botolena & Carinosa (Gas-A)christian100% (4)
- Final Research ReportDocumento14 páginasFinal Research ReportAlojado Lamuel Jesu AAinda não há avaliações
- Brain and LanguageDocumento3 páginasBrain and LanguageJasper AngelesAinda não há avaliações
- Electronic Load FundamentalsDocumento16 páginasElectronic Load FundamentalsMiguel PenarandaAinda não há avaliações
- Unsaturated Polyester Resins: Influence of The Styrene Concentration On The Miscibility and Mechanical PropertiesDocumento5 páginasUnsaturated Polyester Resins: Influence of The Styrene Concentration On The Miscibility and Mechanical PropertiesMamoon ShahidAinda não há avaliações
- 8 Powerful Methods People Use To Bounce Back From FailureDocumento7 páginas8 Powerful Methods People Use To Bounce Back From FailureGrego CentillasAinda não há avaliações
- Answers To Case Studies 1a - 2dDocumento9 páginasAnswers To Case Studies 1a - 2dOgnen GaleskiAinda não há avaliações
- Donna Claire B. Cañeza: Central Bicol State University of AgricultureDocumento8 páginasDonna Claire B. Cañeza: Central Bicol State University of AgricultureDanavie AbergosAinda não há avaliações
- Resume of Masterchef Contestant, Melissa GutierrezDocumento3 páginasResume of Masterchef Contestant, Melissa GutierrezMikhail GalatinovAinda não há avaliações
- Mitochondrial Mechanisms of PhotobiomodulationDocumento4 páginasMitochondrial Mechanisms of PhotobiomodulationGabrielAinda não há avaliações
- Reading İzmir Culture Park Through Women S Experiences Matinee Practices in The 1970s Casino SpacesDocumento222 páginasReading İzmir Culture Park Through Women S Experiences Matinee Practices in The 1970s Casino SpacesAta SagirogluAinda não há avaliações
- Afia Rasheed Khan V. Mazharuddin Ali KhanDocumento6 páginasAfia Rasheed Khan V. Mazharuddin Ali KhanAbhay GuptaAinda não há avaliações
- 9.2 Volumetric Analysis PDFDocumento24 páginas9.2 Volumetric Analysis PDFJoaquinAinda não há avaliações
- NorthStar 5th Edition Reading-Writing SKILLS 3-4Documento265 páginasNorthStar 5th Edition Reading-Writing SKILLS 3-4Hassan JENZYAinda não há avaliações
- Olinger v. The Church of Jesus Christ of Latter Day Saints Et Al - Document No. 1Documento4 páginasOlinger v. The Church of Jesus Christ of Latter Day Saints Et Al - Document No. 1Justia.comAinda não há avaliações
- Strategi Pencegahan Kecelakaan Di PT VALE Indonesia Presentation To FPP Workshop - APKPI - 12102019Documento35 páginasStrategi Pencegahan Kecelakaan Di PT VALE Indonesia Presentation To FPP Workshop - APKPI - 12102019Eko Maulia MahardikaAinda não há avaliações
- Rediscovering The True Self Through TheDocumento20 páginasRediscovering The True Self Through TheManuel Ortiz100% (1)
- Activity Chapter1 ManagementDocumento7 páginasActivity Chapter1 ManagementTricia Amigo SacareAinda não há avaliações