Você também pode gostar
- Unit 8Documento16 páginasUnit 8S. KumarAinda não há avaliações
- Mathematical Modelling PDFDocumento32 páginasMathematical Modelling PDFShruti100% (1)
- Cox Proportional-Hazards Regression For Survival Data: John Fox 15 June 2008 (Small Corrections)Documento18 páginasCox Proportional-Hazards Regression For Survival Data: John Fox 15 June 2008 (Small Corrections)LucijaRomićAinda não há avaliações
- Differential Calculus L'étude de La Croissance Ou de La Décroissance de La Population D'une EntitéDocumento14 páginasDifferential Calculus L'étude de La Croissance Ou de La Décroissance de La Population D'une EntitéTOURE LANSANAAinda não há avaliações
- Lesson 4 - The Life TableDocumento11 páginasLesson 4 - The Life TableStephen Magudha0% (1)
- Chapter 1 Mathematics of Survival AnalysisDocumento13 páginasChapter 1 Mathematics of Survival AnalysisRandy LimAinda não há avaliações
- Appendix Cox RegressionDocumento20 páginasAppendix Cox RegressionAnonymous gUySMcpSqAinda não há avaliações
- Chapter 1 - Mathematics of Survival AnalysisDocumento13 páginasChapter 1 - Mathematics of Survival AnalysisAdrian BehAinda não há avaliações
- Chapter 1 Survival Distributions and Life TablesDocumento14 páginasChapter 1 Survival Distributions and Life TablesAkif Muhammad100% (1)
- A Note On Persistence About Structured Population ModelsDocumento17 páginasA Note On Persistence About Structured Population ModelsBibi Yusra RuhomallyAinda não há avaliações
- Life TablesDocumento5 páginasLife TablesYilun DuAinda não há avaliações
- Introduction To Population EcologyDocumento43 páginasIntroduction To Population EcologyAmalAinda não há avaliações
- Coalescent TheoryDocumento9 páginasCoalescent TheoryNorberto Francisco BaldiAinda não há avaliações
- Life Expectancy Comparison Between A Study Cohort and A Reference PopulationDocumento15 páginasLife Expectancy Comparison Between A Study Cohort and A Reference PopulationTrung Kien VoAinda não há avaliações
- Appendix Cox RegressionDocumento19 páginasAppendix Cox RegressionJuan Carlos Lopez MesaAinda não há avaliações
- ARTICLE 3, Vol 1, No 3, Central Limit Theorem and Its ApplicationsDocumento12 páginasARTICLE 3, Vol 1, No 3, Central Limit Theorem and Its ApplicationsJoséAinda não há avaliações
- Survival Analysis Using Split Plot in Time Models: Omar Hikmat Abdulla, Khawla Mustafa SadikDocumento4 páginasSurvival Analysis Using Split Plot in Time Models: Omar Hikmat Abdulla, Khawla Mustafa SadikInternational Journal of Engineering Inventions (IJEI)Ainda não há avaliações
- Life Contingencies VignettesDocumento27 páginasLife Contingencies Vignettesgaby-01Ainda não há avaliações
- Survival Models and Their EstimationDocumento8 páginasSurvival Models and Their EstimationluluAinda não há avaliações
- Exploring Chaos in Malthus' Population Growth Model 2.0Documento12 páginasExploring Chaos in Malthus' Population Growth Model 2.0David Sendín LloredaAinda não há avaliações
- Actur Chap 3Documento6 páginasActur Chap 3Beshir EshetuAinda não há avaliações
- Dokumen - Tips Cap 3 Bowers 1997 Actuarial Mathematics 2edDocumento53 páginasDokumen - Tips Cap 3 Bowers 1997 Actuarial Mathematics 2edSri Jelita PutriAinda não há avaliações
- Derivation of Reaction-Diffusion Equations: 1.1 Fick's LawDocumento14 páginasDerivation of Reaction-Diffusion Equations: 1.1 Fick's LawFigueiredo MarcosAinda não há avaliações
- CH 2Documento24 páginasCH 2dqvietd2vAinda não há avaliações
- Life Tables-1Documento10 páginasLife Tables-1Umair KhalidAinda não há avaliações
- Predator Prey ModelDocumento5 páginasPredator Prey ModelAbdul ManafAinda não há avaliações
- Two-Prey One Predator Model: Submitted by Ausmita BarmanDocumento23 páginasTwo-Prey One Predator Model: Submitted by Ausmita BarmanRocking AritroAinda não há avaliações
- Chapter3 - SINGLE-SPECIES POPULATION DYNAMICS PDFDocumento30 páginasChapter3 - SINGLE-SPECIES POPULATION DYNAMICS PDFPaulo Costa SilvaAinda não há avaliações
- Effects of Population Mixing On The Spread of SIR Epidemics: T E P J BDocumento6 páginasEffects of Population Mixing On The Spread of SIR Epidemics: T E P J BEdgardo OlateAinda não há avaliações
- Convergencia Uniforme y TransitivaDocumento6 páginasConvergencia Uniforme y TransitivaJAVIER ANTONIO HILASACA CONDORIAinda não há avaliações
- Insect EcologyDocumento40 páginasInsect EcologySandeep kumar SathuaAinda não há avaliações
- Lecture 3: Continuous Times Markov Chains. Poisson Process. Birth and Death ProcessDocumento11 páginasLecture 3: Continuous Times Markov Chains. Poisson Process. Birth and Death Processgopinath12331892Ainda não há avaliações
- Precautionary Principle PapersDocumento36 páginasPrecautionary Principle Papersrozo_asterAinda não há avaliações
- 1 s2.0 0025556485900471 MainDocumento18 páginas1 s2.0 0025556485900471 MainPrabhat RanjanAinda não há avaliações
- Estimating Survival Functions From The Life Table : J. Chron. Dis. 1969Documento16 páginasEstimating Survival Functions From The Life Table : J. Chron. Dis. 1969Hemangi KulkarniAinda não há avaliações
- Methodology Note On The Human Life-Table Database (HLD)Documento12 páginasMethodology Note On The Human Life-Table Database (HLD)dw_adriantoAinda não há avaliações
- Multiple Stages PDFDocumento43 páginasMultiple Stages PDFKenneth Emeka OnumaAinda não há avaliações
- On The Path To ExtintionDocumento5 páginasOn The Path To ExtintionhumejiasAinda não há avaliações
- A Large Deviations Principle For The M-TDocumento14 páginasA Large Deviations Principle For The M-TAnita DíazAinda não há avaliações
- Conway's Game of Life Makes Use of Sparse MatricesDocumento9 páginasConway's Game of Life Makes Use of Sparse MatricesLuigi1721Ainda não há avaliações
- Probability Theory (MATHIAS LOWE)Documento69 páginasProbability Theory (MATHIAS LOWE)Vladimir MorenoAinda não há avaliações
- Life Tables Survivorship Curves and Popuation GrowthDocumento18 páginasLife Tables Survivorship Curves and Popuation Growthchikondi dakaAinda não há avaliações
- Dynamical Analysis in Predator-Prey-Scavenger Model With Harvesting Intervention On Prey PopulationDocumento9 páginasDynamical Analysis in Predator-Prey-Scavenger Model With Harvesting Intervention On Prey PopulationImran HasanuddinAinda não há avaliações
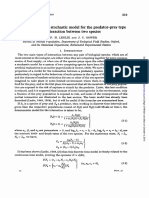
- The Properties of A Stochastic Model For The Predator-Prey Type of Interaction Between Two SpeciesDocumento16 páginasThe Properties of A Stochastic Model For The Predator-Prey Type of Interaction Between Two SpeciesramadhaniAinda não há avaliações
- Branching Stochastic Processes History, Theory, Applications - Mitov 2011Documento9 páginasBranching Stochastic Processes History, Theory, Applications - Mitov 2011Manelisi LuthuliAinda não há avaliações
- Alternative Price Processes For Black-Scholes: Empirical Evidence and TheoryDocumento44 páginasAlternative Price Processes For Black-Scholes: Empirical Evidence and TheorypuraverajanAinda não há avaliações
- 535 DemetriusDocumento10 páginas535 DemetriusmintillaAinda não há avaliações
- 16 Leslie MatrixDocumento44 páginas16 Leslie Matrixsiti nur izzatiAinda não há avaliações
- unit1BSTAT 531 SURVIVAL ANALYSIS 2Documento12 páginasunit1BSTAT 531 SURVIVAL ANALYSIS 2Aby MathewAinda não há avaliações
- Chapter 01Documento10 páginasChapter 01BonjamesNgAinda não há avaliações
- Module 1.2 - Growth KineticsDocumento3 páginasModule 1.2 - Growth KineticsnavneetAinda não há avaliações
- Mathematical Models of Interactions Betw PDFDocumento18 páginasMathematical Models of Interactions Betw PDFfredbuscaglioneAinda não há avaliações
- 9 1Documento27 páginas9 1komarovischool8Ainda não há avaliações
- Financial Mathematics: Jonathan ZiveyiDocumento32 páginasFinancial Mathematics: Jonathan ZiveyiBobAinda não há avaliações
- Life Table: Producers of Their deDocumento5 páginasLife Table: Producers of Their deIlham ArfiansyahAinda não há avaliações
- AE12 Lecture 4 PDFDocumento33 páginasAE12 Lecture 4 PDFkarishma DASHAinda não há avaliações
- Lec2 PDFDocumento40 páginasLec2 PDFAndrewAinda não há avaliações
- 06 SysDiffEquDocumento12 páginas06 SysDiffEquViniciusAinda não há avaliações
- Period Three Implies ChaosDocumento9 páginasPeriod Three Implies ChaosPedro CoelhoAinda não há avaliações
- Doctor Platoo!Documento18 páginasDoctor Platoo!Cakama MbimbiAinda não há avaliações
- Cardiac EmergenciesDocumento18 páginasCardiac EmergenciesCakama MbimbiAinda não há avaliações
- Diet MatchingDocumento18 páginasDiet MatchingCakama MbimbiAinda não há avaliações
- Maiden SpeechDocumento18 páginasMaiden SpeechCakama MbimbiAinda não há avaliações
- Urban & Regional Economics Eaeq 3211 Lesson 1 Notes (Autosaved)Documento12 páginasUrban & Regional Economics Eaeq 3211 Lesson 1 Notes (Autosaved)Cakama MbimbiAinda não há avaliações
- Urban Implementation Kilimani AreaDocumento1 páginaUrban Implementation Kilimani AreaCakama MbimbiAinda não há avaliações
- Research Methodology: Bbe 511/ble 501: Term Paper/Assignment 1 For 2016/17Documento6 páginasResearch Methodology: Bbe 511/ble 501: Term Paper/Assignment 1 For 2016/17Cakama MbimbiAinda não há avaliações
- University of Nairobi: College of Architecture and Engineering From:The College Librarian, CAEDocumento3 páginasUniversity of Nairobi: College of Architecture and Engineering From:The College Librarian, CAECakama MbimbiAinda não há avaliações
- Earthmoving EquipmentDocumento63 páginasEarthmoving EquipmentCakama MbimbiAinda não há avaliações
- Water Contractors 2014 Updated PDFDocumento19 páginasWater Contractors 2014 Updated PDFCakama MbimbiAinda não há avaliações
- Establishing Integrated Community Management of Malaria Handout v3 PDFDocumento2 páginasEstablishing Integrated Community Management of Malaria Handout v3 PDFCakama MbimbiAinda não há avaliações
- Life Insurance Mathematics: Printed BookDocumento1 páginaLife Insurance Mathematics: Printed BookCakama MbimbiAinda não há avaliações
- CV - Emmanuel PDFDocumento4 páginasCV - Emmanuel PDFCakama Mbimbi100% (1)
- Course Outline For Bachelor of Medicine and Bachelor Surgery in The University of NairobiDocumento4 páginasCourse Outline For Bachelor of Medicine and Bachelor Surgery in The University of NairobiCakama Mbimbi50% (2)
- Calculating R Using An Iterative MethodDocumento3 páginasCalculating R Using An Iterative MethodCakama MbimbiAinda não há avaliações
- EffectiveTeaching Full PDFDocumento270 páginasEffectiveTeaching Full PDFCakama Mbimbi100% (1)
- Emoc Quickrefguide PDFDocumento106 páginasEmoc Quickrefguide PDFCakama MbimbiAinda não há avaliações
- FANC JobAid Malawi enDocumento4 páginasFANC JobAid Malawi enCakama MbimbiAinda não há avaliações
- Video Tutorials of Read and Write Seagate F3 Series HDDs by MRT - MRT LabDocumento1 páginaVideo Tutorials of Read and Write Seagate F3 Series HDDs by MRT - MRT LabBusur DataAinda não há avaliações
- Thesis Brand BlanketDocumento4 páginasThesis Brand BlanketKayla Smith100% (2)
- Pantalla Anterior Bienvenido: Cr080vbesDocumento3 páginasPantalla Anterior Bienvenido: Cr080vbesJuan Pablo Virreyra TriguerosAinda não há avaliações
- Pertanyaan TK PDBDocumento4 páginasPertanyaan TK PDBHardenAinda não há avaliações
- Load Distribution Flow Chart For Bridge DesignDocumento1 páginaLoad Distribution Flow Chart For Bridge DesignBunkun15Ainda não há avaliações
- Pitman SolutionDocumento190 páginasPitman SolutionBon Siranart50% (2)
- Chapter 1 - Part 1 Introduction To Organic ChemistryDocumento43 páginasChapter 1 - Part 1 Introduction To Organic ChemistryqilahmazlanAinda não há avaliações
- Famous Bombers of The Second World War - 1st SeriesDocumento142 páginasFamous Bombers of The Second World War - 1st Seriesgunfighter29100% (1)
- Types of WinesDocumento91 páginasTypes of Winesrajanrld19880% (1)
- Habitat Preference of Great Argus Pheasant ArgusiaDocumento11 páginasHabitat Preference of Great Argus Pheasant ArgusiaFaradlina MuftiAinda não há avaliações
- مستر رمضان عوضDocumento24 páginasمستر رمضان عوضSamuel SaadAinda não há avaliações
- MAP V6.3: Reference ManualDocumento106 páginasMAP V6.3: Reference ManualGkou DojkuAinda não há avaliações
- The Gingerbread Man-1 EnglishareDocumento40 páginasThe Gingerbread Man-1 EnglishareamayalibelulaAinda não há avaliações
- Practical 3.1 Determining The Specific Heat CapacityDocumento3 páginasPractical 3.1 Determining The Specific Heat CapacityiAlex11Ainda não há avaliações
- EU - Guidance On GMP For Food Contact Plastic Materials and Articles (60p)Documento60 páginasEU - Guidance On GMP For Food Contact Plastic Materials and Articles (60p)Kram NawkAinda não há avaliações
- Water Reuse RoundtableDocumento10 páginasWater Reuse RoundtableajiiithAinda não há avaliações
- Neuropsychological Performance in Neurofibromatosis Type 1: Original ArticleDocumento5 páginasNeuropsychological Performance in Neurofibromatosis Type 1: Original ArticleRaquel DuarteAinda não há avaliações
- SFT PresentationDocumento16 páginasSFT Presentationapna indiaAinda não há avaliações
- Chemistry Jun 2010 Mark Scheme Unit 3Documento15 páginasChemistry Jun 2010 Mark Scheme Unit 3dylandonAinda não há avaliações
- Curso VII Lectura 2. New Rural Social MovementsDocumento12 páginasCurso VII Lectura 2. New Rural Social MovementsFausto Inzunza100% (1)
- DEAD STARS by Paz Marquez BenitezDocumento17 páginasDEAD STARS by Paz Marquez BenitezArmiethazen Khea Page PalarcaAinda não há avaliações
- QIAGEN Price List 2017Documento62 páginasQIAGEN Price List 2017Dayakar Padmavathi Boddupally80% (5)
- Product Specifications: MB3F-PSA4-19DEDocumento2 páginasProduct Specifications: MB3F-PSA4-19DEВадим ЧеховскийAinda não há avaliações
- Air System Sizing Summary For NIVEL PB - Zona 1Documento1 páginaAir System Sizing Summary For NIVEL PB - Zona 1Roger PandoAinda não há avaliações
- Introduction To Cement Chemistry and Classification BY Dr.K.RainaDocumento89 páginasIntroduction To Cement Chemistry and Classification BY Dr.K.Rainakishana ramAinda não há avaliações
- Hydraulics Course FileDocumento81 páginasHydraulics Course FileSwarna LathaAinda não há avaliações
- Excretory Products and Their EliminationDocumento13 páginasExcretory Products and Their Eliminationaravind kishanAinda não há avaliações
- Kulkarni Shilpa A.Documento148 páginasKulkarni Shilpa A.MSKCAinda não há avaliações
- AssignmentDocumento13 páginasAssignmentSwakshar DebAinda não há avaliações
- Sikagrout®-214 Ae: Product Data SheetDocumento3 páginasSikagrout®-214 Ae: Product Data Sheetmohammed rinshinAinda não há avaliações