Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- How To Be The Golden Egg in The Trading Game PrintDocumento68 páginasHow To Be The Golden Egg in The Trading Game PrintNagy100% (1)
- Training D112 - V3 - 02E PDFDocumento77 páginasTraining D112 - V3 - 02E PDFkratmelAinda não há avaliações
- APC000230AIPleocs 1Documento6 páginasAPC000230AIPleocs 1RizkaAinda não há avaliações
- Goldenrulesreport PDFDocumento150 páginasGoldenrulesreport PDFRizkaAinda não há avaliações
- Mahakam Bright FutureDocumento12 páginasMahakam Bright FutureRizkaAinda não há avaliações
- Unconventional Oil and Gas Potential PDFDocumento85 páginasUnconventional Oil and Gas Potential PDFRizka100% (1)
- Indonesian Current Policy & RegulationDocumento23 páginasIndonesian Current Policy & RegulationRizkaAinda não há avaliações
- Biodiversity and GeodiversityDocumento23 páginasBiodiversity and GeodiversityRizkaAinda não há avaliações
- Overcoming Infrastructure ChallengeDocumento20 páginasOvercoming Infrastructure ChallengeRizkaAinda não há avaliações
- Indonesia Oil and Gas Guide 2012Documento361 páginasIndonesia Oil and Gas Guide 2012krakrikruAinda não há avaliações
- AVO & InversionDocumento44 páginasAVO & InversionRizkaAinda não há avaliações
- Session 11 - Seismic Inversion (II)Documento78 páginasSession 11 - Seismic Inversion (II)RizkaAinda não há avaliações
- 1918 LithosiDocumento62 páginas1918 LithosiRizkaAinda não há avaliações
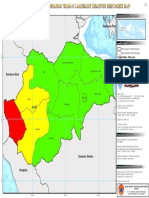
- Risk Landslide JambiDocumento1 páginaRisk Landslide JambiRizkaAinda não há avaliações
- Vee Ken and Desilva 04Documento24 páginasVee Ken and Desilva 04RizkaAinda não há avaliações
- CGGV 0000012643Documento22 páginasCGGV 0000012643RizkaAinda não há avaliações
- Potensi Geowisata Bukit Karst Malakutan Desa Kolok Nantuo, Kota Sawahlunto Sumatra BaratDocumento13 páginasPotensi Geowisata Bukit Karst Malakutan Desa Kolok Nantuo, Kota Sawahlunto Sumatra BaratRizkaAinda não há avaliações
- Geotourism PDFDocumento61 páginasGeotourism PDFRizkaAinda não há avaliações
- Caves and KarstDocumento57 páginasCaves and KarstAlexandru StefanAinda não há avaliações
- Stochastic InversionDocumento16 páginasStochastic InversionLeone DoisneauAinda não há avaliações
- Potensi Geowisata Bukit Karst Malakutan Desa Kolok Nantuo, Kota Sawahlunto Sumatra BaratDocumento13 páginasPotensi Geowisata Bukit Karst Malakutan Desa Kolok Nantuo, Kota Sawahlunto Sumatra BaratRizkaAinda não há avaliações
- Alan Briggs Spot6 PDFDocumento24 páginasAlan Briggs Spot6 PDFRizkaAinda não há avaliações
- Biogenic Abiogenic HC PDFDocumento9 páginasBiogenic Abiogenic HC PDFRizkaAinda não há avaliações
- Geo TourismDocumento61 páginasGeo TourismRizkaAinda não há avaliações
- Geo TourismDocumento61 páginasGeo TourismRizkaAinda não há avaliações
- Formation Evaluations: Well LogsDocumento11 páginasFormation Evaluations: Well LogsRMolina65Ainda não há avaliações
- Resistivity LogDocumento44 páginasResistivity Logmadabhay5172100% (13)
- Schutte IC Chapter4 Visitor ManagementDocumento60 páginasSchutte IC Chapter4 Visitor ManagementRizkaAinda não há avaliações
- Registros Electricos PDFDocumento36 páginasRegistros Electricos PDFSaid Nahum Montes CarballoAinda não há avaliações
- SLB Log Interpretation ChartsDocumento310 páginasSLB Log Interpretation ChartsChilledambienceAinda não há avaliações
- Spectral Analysis For GeophysicsDocumento27 páginasSpectral Analysis For GeophysicsRizkaAinda não há avaliações
- Power Spectral DensityDocumento18 páginasPower Spectral DensityNoir HamannAinda não há avaliações
- Implementation of MIL-STD-1553 Data BusDocumento5 páginasImplementation of MIL-STD-1553 Data BusIJMERAinda não há avaliações
- Oracle OTL Timecard Layout CustomicationDocumento138 páginasOracle OTL Timecard Layout CustomicationFoolIshAinda não há avaliações
- Dorothy Johnson's TheoryDocumento23 páginasDorothy Johnson's Theoryarielledy0405Ainda não há avaliações
- CVE 202 Lecture - 28062021Documento11 páginasCVE 202 Lecture - 28062021odubade opeyemiAinda não há avaliações
- Lesson 2: IGSS System Overview: Interactive Graphical SCADA SystemDocumento7 páginasLesson 2: IGSS System Overview: Interactive Graphical SCADA SystemRoberto CarrascoAinda não há avaliações
- Direct 3 DDocumento406 páginasDirect 3 Dxlam99Ainda não há avaliações
- Design and Fabrication Dual Side Shaper MachineDocumento2 páginasDesign and Fabrication Dual Side Shaper MachineKarthik DmAinda não há avaliações
- COBIT Checklist and ReviewDocumento20 páginasCOBIT Checklist and ReviewMike0% (1)
- Cs 1410Documento2 páginasCs 1410David DengAinda não há avaliações
- A Study On Green Supply Chain Management Practices Among Large Global CorporationsDocumento13 páginasA Study On Green Supply Chain Management Practices Among Large Global Corporationstarda76Ainda não há avaliações
- TG Comply With WP Hygiene Proc 270812 PDFDocumento224 páginasTG Comply With WP Hygiene Proc 270812 PDFEmelita MendezAinda não há avaliações
- Wisdom Blog - Sri Sri Ravi Shankar Art of LivingDocumento3 páginasWisdom Blog - Sri Sri Ravi Shankar Art of LivingShrikrishna PotdarAinda não há avaliações
- Method Statement For Surface Preparation and Coating For Pipes Fittings (Perma)Documento10 páginasMethod Statement For Surface Preparation and Coating For Pipes Fittings (Perma)Mohamed KhalilAinda não há avaliações
- Seven Steps To Successful Strategic PlanningDocumento4 páginasSeven Steps To Successful Strategic PlanningtaimostymosAinda não há avaliações
- Active CitizenshipDocumento2 páginasActive CitizenshiprachidAinda não há avaliações
- Transferring Stock and Sales Data Process SAP StandardDocumento3 páginasTransferring Stock and Sales Data Process SAP StandardrksamplaAinda não há avaliações
- Whats Dupont SGP Interlayerldsts PDFDocumento3 páginasWhats Dupont SGP Interlayerldsts PDFnightact44Ainda não há avaliações
- Vision Board MasteryDocumento10 páginasVision Board MasteryElena Costa PalacínAinda não há avaliações
- Chiller MC Quay MacDocumento14 páginasChiller MC Quay MacJimmy Franz Caballero ZuñigaAinda não há avaliações
- Simple Stress & StrainDocumento34 páginasSimple Stress & StrainfaisalasgharAinda não há avaliações
- 1920 Course Pre Information FINALDocumento16 páginas1920 Course Pre Information FINALIamSajid JatoiAinda não há avaliações
- Collision PHET LabDocumento4 páginasCollision PHET LabBahril IlmiwanAinda não há avaliações
- 1 Lesson Plan in Formulating AssertionsDocumento6 páginas1 Lesson Plan in Formulating AssertionsGenelyn TimolaAinda não há avaliações
- Penyelarasan Instrumen Pentaksiran PBD Tahun 2 2024Documento2 páginasPenyelarasan Instrumen Pentaksiran PBD Tahun 2 2024Hui YingAinda não há avaliações
- JjiDocumento64 páginasJjiPriyanka YaduAinda não há avaliações
- Samcef RotorDocumento4 páginasSamcef RotorChihiya Fitria NurhayatiAinda não há avaliações
- Cap 05Documento10 páginasCap 05haulam leeAinda não há avaliações
- Processes 05 00040 PDFDocumento15 páginasProcesses 05 00040 PDFPedro Romel Nascimento HerbayAinda não há avaliações