Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Ed Leedskalnin - Magnetic Current (Illustrated)Documento51 páginasEd Leedskalnin - Magnetic Current (Illustrated)anon-8317394% (66)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Pokémon Floral Tempus - Wild Pokémon Locations PDFDocumento1 páginaPokémon Floral Tempus - Wild Pokémon Locations PDFMightyZanark Gaming100% (3)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Top Secret - Dragon Magazine AdventuresDocumento102 páginasTop Secret - Dragon Magazine AdventuresPaulCoppolelli100% (11)
- Phil Lewis ArchitectDocumento27 páginasPhil Lewis ArchitectHema VarneswariAinda não há avaliações
- Urban Planning As An Urban Problem: The Reconstruction of Tokyo After The Great Kanto EarthquakeDocumento15 páginasUrban Planning As An Urban Problem: The Reconstruction of Tokyo After The Great Kanto EarthquakemureauxAinda não há avaliações
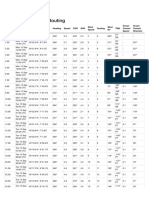
- FastSeas - Weather RoutingDocumento2 páginasFastSeas - Weather RoutingSergio GarciaAinda não há avaliações
- Descriptive Is PeterDocumento14 páginasDescriptive Is Peterglobal NetAinda não há avaliações
- Design FlowlandscapeDocumento327 páginasDesign FlowlandscapeKamila AndradeAinda não há avaliações
- Waterfront TerminologyDocumento19 páginasWaterfront TerminologyOceanengAinda não há avaliações
- Caribbean Studies - Definition of The Caribbean.Documento2 páginasCaribbean Studies - Definition of The Caribbean.Cristiano RaghubarAinda não há avaliações
- Unit 11Documento20 páginasUnit 11Petrish JohnnyAinda não há avaliações
- The Spratly Islands DisputeDocumento36 páginasThe Spratly Islands DisputeSuzaku Lee0% (1)
- Map PDFDocumento64 páginasMap PDFAdelina PirleaAinda não há avaliações
- Vallejo Effects PDFDocumento2 páginasVallejo Effects PDFakinator100% (1)
- Canal ListDocumento1 páginaCanal ListsadagoapanAinda não há avaliações
- Lab 4aDocumento5 páginasLab 4aRome GentaAinda não há avaliações
- Topographic Map of BaysideDocumento1 páginaTopographic Map of BaysideHistoricalMapsAinda não há avaliações
- Tropical Rainforest Heritage of Sumatra Unesco PDFDocumento211 páginasTropical Rainforest Heritage of Sumatra Unesco PDFDel MuhtadinAinda não há avaliações
- Spatial Data Analysis - RajuDocumento24 páginasSpatial Data Analysis - RajusonjascribdAinda não há avaliações
- Course Title: Evolution of Geographical ThoughtsDocumento41 páginasCourse Title: Evolution of Geographical ThoughtstimothyAinda não há avaliações
- Deformed Skull TraditionDocumento10 páginasDeformed Skull TraditionClarence Kate NaborcAinda não há avaliações
- Geography Revision SlidesDocumento173 páginasGeography Revision SlidesAbdallahAinda não há avaliações
- What Is A TsunamiDocumento35 páginasWhat Is A Tsunamitaurus_nikita4484Ainda não há avaliações
- Structural Stability of Mullaperiyar Dam Considering The Seismic EffectsDocumento29 páginasStructural Stability of Mullaperiyar Dam Considering The Seismic EffectsenvirokeralaAinda não há avaliações
- Sabarmati Riverfront Development - CompDocumento191 páginasSabarmati Riverfront Development - CompAnurag Bagade100% (1)
- Culture and Customs of MoroccoDocumento177 páginasCulture and Customs of Moroccosimon75% (4)
- Case StudiesDocumento7 páginasCase Studiesnikhita0412100% (1)
- Nmexample Rev3Documento36 páginasNmexample Rev3Eijo RijalAinda não há avaliações
- Magnetic CompassDocumento36 páginasMagnetic CompassRajeewa Wickramahewage100% (1)
- Follow These Directions To Answer The Focus Question:: Web Inquiry: MesopotamiaDocumento5 páginasFollow These Directions To Answer The Focus Question:: Web Inquiry: MesopotamiateriseAinda não há avaliações