Você também pode gostar
- FinalDocumento13 páginasFinaljairo polo0% (1)
- Nivel 2 Leccion 4 Examen 4 Técnico en La Instalación y Reparación de Equipo de CómputoDocumento5 páginasNivel 2 Leccion 4 Examen 4 Técnico en La Instalación y Reparación de Equipo de Cómputojlopez_93991767% (6)
- DinámicaDocumento11 páginasDinámicaJuan Jose100% (2)
- Tarea 3 - Hacer Uso de Comandos Básicos de Programación Con Software Especializado - Tatiana - SuarezDocumento18 páginasTarea 3 - Hacer Uso de Comandos Básicos de Programación Con Software Especializado - Tatiana - SuarezFernando Muñoz100% (2)
- Fichas Técnicas Alimentación Colectiva y SaludableDocumento15 páginasFichas Técnicas Alimentación Colectiva y SaludableAlan NavarroAinda não há avaliações
- Act 9 Quiz 2Documento8 páginasAct 9 Quiz 2Raul Andres Portela Moreno100% (1)
- Examen Final - Control AutomáticoDocumento5 páginasExamen Final - Control AutomáticoAlex AlmeidaAinda não há avaliações
- Practica2 Arte Cinematica InverasaDocumento18 páginasPractica2 Arte Cinematica InverasaMarcelo Vasquez GarciaAinda não há avaliações
- Evaluacion Tercer Parcial Fecha - 07-02-2022 - Revisión Del IntentoDocumento15 páginasEvaluacion Tercer Parcial Fecha - 07-02-2022 - Revisión Del IntentoWilliam WillAinda não há avaliações
- PD 01 Mat II Limit 2024 I EconomiaDocumento5 páginasPD 01 Mat II Limit 2024 I Economiapaula.valeria1618Ainda não há avaliações
- Implementación de Simulink en Un Robot Paralelo - RobóticaDocumento26 páginasImplementación de Simulink en Un Robot Paralelo - RobóticaAdrian RicardezAinda não há avaliações
- Ejercicios de Matemática Aplicada-Parcial 2Documento13 páginasEjercicios de Matemática Aplicada-Parcial 2Pablo OrtegaAinda não há avaliações
- Test - Aspirante A Tecnico Domicilio 2021Documento7 páginasTest - Aspirante A Tecnico Domicilio 2021zlatan fragozoAinda não há avaliações
- Analisis de SensibilidadDocumento21 páginasAnalisis de SensibilidadGladys ArochaAinda não há avaliações
- Exa 2016 1s Fundamentos de Robótica 2 1parDocumento5 páginasExa 2016 1s Fundamentos de Robótica 2 1parTirado JosefinaAinda não há avaliações
- Parcial 2 - Revisión Del Intento AutomatizacionDocumento8 páginasParcial 2 - Revisión Del Intento Automatizacionlorraine elizabeth castro mendoza100% (1)
- Aplicación de Cinemática DirectaDocumento12 páginasAplicación de Cinemática DirectaEduardo ArriagaAinda não há avaliações
- Sa Ie 2017 09 15 PDFDocumento3 páginasSa Ie 2017 09 15 PDFAlberto RoyoAinda não há avaliações
- Trabajo de Integración Sobre Conceptos de Programación LinealDocumento2 páginasTrabajo de Integración Sobre Conceptos de Programación Linealgargola_mixAinda não há avaliações
- 02 Cinemática Directa e Inversa.Documento10 páginas02 Cinemática Directa e Inversa.sistemaelectricoAinda não há avaliações
- Examen FinalDocumento9 páginasExamen FinalAlex Caruajulca Tiglla100% (5)
- Cinemática Inversa de RobotsDocumento5 páginasCinemática Inversa de RobotsAcus Xelor Imperium TemporeAinda não há avaliações
- Práctica 6 - Daniel Sánchez Pérez LaraDocumento11 páginasPráctica 6 - Daniel Sánchez Pérez LaraAna Pau OlveraAinda não há avaliações
- Parcial 2 - AutomatizaciónDocumento7 páginasParcial 2 - AutomatizaciónGab JonesAinda não há avaliações
- Informe 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioDocumento28 páginasInforme 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioJose OlazabalAinda não há avaliações
- EvallDocumento58 páginasEvallJesus Fabian Contreras0% (1)
- Todo de Todo PDFDocumento317 páginasTodo de Todo PDFcarlos nolivos ramirezAinda não há avaliações
- Act 5 Quiz 1 - RoboticaDocumento6 páginasAct 5 Quiz 1 - RoboticaKaren JardimAinda não há avaliações
- Ejercicios de Programación Lineal y Simplex 22GIOIDocumento9 páginasEjercicios de Programación Lineal y Simplex 22GIOIjesus hernando abaunza castilloAinda não há avaliações
- Examen Final Intro RobóticaDocumento3 páginasExamen Final Intro RobóticaJuan Felipe SanchezAinda não há avaliações
- Entrega Final ProyectoDocumento5 páginasEntrega Final ProyectoKIi LeeAinda não há avaliações
- Deber 3 - Cinemática de Robots IndustrialesDocumento5 páginasDeber 3 - Cinemática de Robots IndustrialesCristian UrrestaAinda não há avaliações
- Práctica 5 - Daniel Sánchez Pérez LaraDocumento10 páginasPráctica 5 - Daniel Sánchez Pérez LaraAna Pau OlveraAinda não há avaliações
- Trabajo Practico Matematica DiscretaDocumento5 páginasTrabajo Practico Matematica DiscretaSergioAinda não há avaliações
- Evaluame Ed 9Documento638 páginasEvaluame Ed 9Nickolas Cavalera Monroy50% (2)
- Respuestas Autoevaluaciones FPDocumento20 páginasRespuestas Autoevaluaciones FPEsther2003Ainda não há avaliações
- TP 54Documento5 páginasTP 54RichardAinda não há avaliações
- Trabajo Colaborativo - Marcela Moreno.Documento41 páginasTrabajo Colaborativo - Marcela Moreno.Andres RuizAinda não há avaliações
- Problemas Iind 3 AutomatismosIndustrialesDocumento6 páginasProblemas Iind 3 AutomatismosIndustrialesAlexanderSeaOrdayaAinda não há avaliações
- TP 63Documento4 páginasTP 63isaacAinda não há avaliações
- Reporte Final OptiDocumento6 páginasReporte Final OptiBasikoAinda não há avaliações
- Parcial 2 - Revisión Del Intento 2Documento8 páginasParcial 2 - Revisión Del Intento 2Natali Estepa100% (1)
- Aplicacion de Funciones 2Documento13 páginasAplicacion de Funciones 2Diego AcevedoAinda não há avaliações
- Informe - Brazo Robótico 4 GDLDocumento10 páginasInforme - Brazo Robótico 4 GDLadolfoclesAinda não há avaliações
- Lab3 CONTROL DIGTAL 2020ADocumento3 páginasLab3 CONTROL DIGTAL 2020ACésar Jesús AlcaláAinda não há avaliações
- Preguntas Carrera2Documento283 páginasPreguntas Carrera2Camilo Puerto100% (1)
- Ex Observadores Libre OEP2018-2019Documento56 páginasEx Observadores Libre OEP2018-2019Andrés MolinaAinda não há avaliações
- PRUEBA PIC II - Sexto - Septimo - OctavoDocumento6 páginasPRUEBA PIC II - Sexto - Septimo - OctavoHumberto Numpaque LópezAinda não há avaliações
- Fase 5 Evaluacion Robotica 70%Documento12 páginasFase 5 Evaluacion Robotica 70%Larry Bryan WilsonAinda não há avaliações
- t3 - Complementos de MatemáticaDocumento3 páginast3 - Complementos de MatemáticaSebastian QPAinda não há avaliações
- Paso 1 Harry Ojeda 7Documento5 páginasPaso 1 Harry Ojeda 7Xergio LmusAinda não há avaliações
- Examen RoboticaDocumento7 páginasExamen Roboticabenatmateo2Ainda não há avaliações
- Guía para El Desarrollo Del Componente Práctico y Rúbrica de Evaluación - Unidad 1, 2 y 3 - Tarea 5 - Componente Práctico - Prácticas SimuladasDocumento10 páginasGuía para El Desarrollo Del Componente Práctico y Rúbrica de Evaluación - Unidad 1, 2 y 3 - Tarea 5 - Componente Práctico - Prácticas SimuladasSenaMecánicaElectrónicaAinda não há avaliações
- Logica de Programacion 1B V14 2014-2015Documento10 páginasLogica de Programacion 1B V14 2014-2015Francisco Medardo Caiza NuñezAinda não há avaliações
- 2023 04 19 - BancoPreguntasDocumento4 páginas2023 04 19 - BancoPreguntasCamilo AnaconaAinda não há avaliações
- Evaluaciones Robotica UnadDocumento14 páginasEvaluaciones Robotica UnadLuigi CastañoAinda não há avaliações
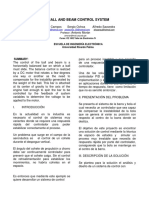
- Ball and Beam Control SystemDocumento10 páginasBall and Beam Control SystemJavier RodriguezAinda não há avaliações
- Af06Documento17 páginasAf061814213 Jose luis Solis ramirezAinda não há avaliações
- Matriz fundamental de visión por computadora: Por favor, sugiera un subtítulo para un libro con el título 'Matriz fundamental de visión por computadora' dentro del ámbito de 'Visión por computadora'. El subtítulo sugerido no debe tener ':'.No EverandMatriz fundamental de visión por computadora: Por favor, sugiera un subtítulo para un libro con el título 'Matriz fundamental de visión por computadora' dentro del ámbito de 'Visión por computadora'. El subtítulo sugerido no debe tener ':'.Ainda não há avaliações
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoNo EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoNota: 4.5 de 5 estrelas4.5/5 (9)
- Algoritmo de la línea de Bresenham: Representación eficiente de líneas con píxeles perfectos para visión por computadoraNo EverandAlgoritmo de la línea de Bresenham: Representación eficiente de líneas con píxeles perfectos para visión por computadoraAinda não há avaliações
- Cinetica QuimicaDocumento22 páginasCinetica QuimicaRamiro BritoAinda não há avaliações
- 1 Modelización de Datos No Negativos Con Aglomeración en El Cero Un EstudioDocumento52 páginas1 Modelización de Datos No Negativos Con Aglomeración en El Cero Un EstudioDayis ArqueAinda não há avaliações
- Taller Balance de Materia PDFDocumento2 páginasTaller Balance de Materia PDFYessiSampieri0% (1)
- Cuestionario ResueltoDocumento54 páginasCuestionario ResueltoAnto TapiaAinda não há avaliações
- Circuito Conversor de Digital A Análogo (Contador + Sumador) "Documento12 páginasCircuito Conversor de Digital A Análogo (Contador + Sumador) "Luis ChasiluisaAinda não há avaliações
- 3 Formas de Preparar El CDH y FaqDocumento3 páginas3 Formas de Preparar El CDH y FaqSalto DimensionalAinda não há avaliações
- Ok - Laboratorio de Prog IDocumento35 páginasOk - Laboratorio de Prog IDavid E. Mendoza GutierrezAinda não há avaliações
- Tarea 2Documento9 páginasTarea 2Fredy TumiñaAinda não há avaliações
- 3 +Alvarez+MorenoDocumento8 páginas3 +Alvarez+MorenoPablo AñorbeAinda não há avaliações
- MR TPS 1 300 2020-1Documento5 páginasMR TPS 1 300 2020-1jamAinda não há avaliações
- Elaboracion de Pan Imprimir AhoraDocumento15 páginasElaboracion de Pan Imprimir AhoraOscar Baquedano OlazabalAinda não há avaliações
- Guía 2 Membrana CelularDocumento2 páginasGuía 2 Membrana CelularAura Maria Cruz BernalAinda não há avaliações
- 2015 Villarrica Xix PucDocumento683 páginas2015 Villarrica Xix PucMatías ValenzuelaAinda não há avaliações
- Unidad 02 Noción y Operaciones Con FraccionesDocumento58 páginasUnidad 02 Noción y Operaciones Con FraccionesMarcos PascualAinda não há avaliações
- Metrados en EdificacionDocumento226 páginasMetrados en EdificacionJonathan Salinas Gonzales100% (7)
- Unidad 3 Parte 2Documento13 páginasUnidad 3 Parte 2Nelson GómezAinda não há avaliações
- Taller de Estadística 1Documento17 páginasTaller de Estadística 1yessika andrea quintero suarezAinda não há avaliações
- Trabajo y Energia IVDocumento6 páginasTrabajo y Energia IVrebeca nievesAinda não há avaliações
- Presión Hidrostatica Informe TeoricoDocumento11 páginasPresión Hidrostatica Informe Teoricojosue mendoza loorAinda não há avaliações
- Edo Contenido Clase No. 7 Edo Lagrange y ClairautsDocumento13 páginasEdo Contenido Clase No. 7 Edo Lagrange y ClairautsSebastian AlexanderAinda não há avaliações
- Infome 1bim Prácticum 4.1 Javier SaquipullaDocumento5 páginasInfome 1bim Prácticum 4.1 Javier SaquipullamarthitacpAinda não há avaliações
- Derivada 2Documento71 páginasDerivada 2Josue TunqueAinda não há avaliações
- Electricidad AutomotrizDocumento53 páginasElectricidad AutomotrizMirian Miluzca Perez Boza100% (2)
- Calculo VectorialDocumento64 páginasCalculo VectorialJose Raul Morales AguilarAinda não há avaliações
- Determinación de Vitamina C en Jugo de NaranjaDocumento8 páginasDeterminación de Vitamina C en Jugo de NaranjaGuillermo ThomasAinda não há avaliações
- Introducción A Las Comunicaciones IndustrialesDocumento29 páginasIntroducción A Las Comunicaciones IndustrialesEnrique FarfanAinda não há avaliações
- Cuaderno de Ejercicios PDFDocumento19 páginasCuaderno de Ejercicios PDFLucianoLvgAinda não há avaliações