Você também pode gostar
- 8086 Section 3-4Documento4 páginas8086 Section 3-4Jaspreet KaurAinda não há avaliações
- Minimum and Maximum Mode of 8086Documento9 páginasMinimum and Maximum Mode of 8086Ankit KumarAinda não há avaliações
- Minimum and Maximum Mode of 8086 of 8086: Sutapa SarkarDocumento26 páginasMinimum and Maximum Mode of 8086 of 8086: Sutapa SarkarNishal Bharadwaj NAinda não há avaliações
- MINDocumento9 páginasMINMOHAMMED ASLAM CAinda não há avaliações
- Features and Modes of 8086Documento11 páginasFeatures and Modes of 8086ABHishekAinda não há avaliações
- Minimum and Maximum Modes of 8086Documento3 páginasMinimum and Maximum Modes of 8086Riya Chaudhary100% (1)
- Microprocessors: BY: Prof. Dileep J Dept. of TCE K.S.I.TDocumento16 páginasMicroprocessors: BY: Prof. Dileep J Dept. of TCE K.S.I.TsenthilAinda não há avaliações
- Pin Diagram of 8086Documento21 páginasPin Diagram of 8086Radha SudheeraAinda não há avaliações
- Memory and Input Output InterfaceDocumento16 páginasMemory and Input Output Interfacerobern ndoloAinda não há avaliações
- Pin Diagram of 8086Documento21 páginasPin Diagram of 8086adithya123456100% (5)
- Min and Max Mode 8259Documento11 páginasMin and Max Mode 8259EC21B1005 SRAVANA SANDHYA BALLAAinda não há avaliações
- Timimg DiagramDocumento27 páginasTimimg DiagramzxcddxzcdzxscAinda não há avaliações
- 8086 Pin Diagram and Descriptions in 40 CharactersDocumento9 páginas8086 Pin Diagram and Descriptions in 40 Characters12343567890100% (2)
- Unit 3 8086 Microprocessor InterfacingDocumento29 páginasUnit 3 8086 Microprocessor InterfacingDere JesusAinda não há avaliações
- Minimum and Maximum Mode CPU ConfigurationDocumento21 páginasMinimum and Maximum Mode CPU ConfigurationAmitabh DixitAinda não há avaliações
- Pin Config1 SNKDocumento6 páginasPin Config1 SNKKirthi RkAinda não há avaliações
- Unit 2 8086 System Bus Structures FullunitDocumento36 páginasUnit 2 8086 System Bus Structures Fullunitlauro eugin brittoAinda não há avaliações
- Advanced Microprocessors Pin Function Comparison of 8088 and 8086Documento53 páginasAdvanced Microprocessors Pin Function Comparison of 8088 and 8086Madhav Singh100% (1)
- Berry B Brey Part IDocumento49 páginasBerry B Brey Part Ikalpesh_chandakAinda não há avaliações
- Unit III 8086 Microprocessor InterfacingDocumento26 páginasUnit III 8086 Microprocessor InterfacingRammanohar Lokiya100% (1)
- Signal Groups of 8086Documento18 páginasSignal Groups of 8086Macdonald DanielAinda não há avaliações
- 8086 FullDocumento72 páginas8086 FullNandhini Nachiyar100% (4)
- 21CS1302 - Camp - Unit 4 NotesDocumento41 páginas21CS1302 - Camp - Unit 4 Notespec libraryAinda não há avaliações
- Maximum Mode 8086 SystemDocumento9 páginasMaximum Mode 8086 Systemchenna838Ainda não há avaliações
- 8086 Microprocessor Interfacing: Dr.P.Yogesh, Senior Lecturer, DCSE, CEG Campus, Anna University, Chennai-25Documento40 páginas8086 Microprocessor Interfacing: Dr.P.Yogesh, Senior Lecturer, DCSE, CEG Campus, Anna University, Chennai-25Janu100% (2)
- Unit II 8086 SYSTEM Bus Structure: BookDocumento194 páginasUnit II 8086 SYSTEM Bus Structure: BookGomathi PsAinda não há avaliações
- mic_unit1Documento21 páginasmic_unit1xboyxman1000Ainda não há avaliações
- Direct Memory Access (DMA) : Burst ModeDocumento7 páginasDirect Memory Access (DMA) : Burst ModeAnand ReddyAinda não há avaliações
- Pin Diagram of 8086 MicroprocessorDocumento14 páginasPin Diagram of 8086 Microprocessorkranthi6190Ainda não há avaliações
- Unit III MPMC MaterialDocumento33 páginasUnit III MPMC Materialsree2728Ainda não há avaliações
- Timing DiagramDocumento35 páginasTiming DiagramNew worldAinda não há avaliações
- Programmable Serial Interface 8251ADocumento7 páginasProgrammable Serial Interface 8251ASanthosh KumarAinda não há avaliações
- The 8086 Microprocessor Architecture: (8086 Datasheet)Documento31 páginasThe 8086 Microprocessor Architecture: (8086 Datasheet)Feyisa BekeleAinda não há avaliações
- Address Multiplexing - Hardware Structure of 8086Documento57 páginasAddress Multiplexing - Hardware Structure of 8086Mike ThomsonAinda não há avaliações
- 8086 NotesDocumento43 páginas8086 NotesSuma LathaAinda não há avaliações
- Overview or Features of 8086: It Is A 16-Bit MicroprocessorDocumento33 páginasOverview or Features of 8086: It Is A 16-Bit MicroprocessorSamuel KuantumAinda não há avaliações
- MP AssignmentDocumento12 páginasMP AssignmentAdityaAinda não há avaliações
- 8086 Microprocessor Signal Description for Minimum and Maximum ModesDocumento8 páginas8086 Microprocessor Signal Description for Minimum and Maximum ModesRabiul Robi100% (1)
- Overview or Features of 8086Documento33 páginasOverview or Features of 8086Supraja SundaresanAinda não há avaliações
- 1.1 Signal Descriptions - of 8086Documento8 páginas1.1 Signal Descriptions - of 8086Khalifa EltayebAinda não há avaliações
- 8086 Min Max ModesDocumento31 páginas8086 Min Max ModeschakrimvnAinda não há avaliações
- Serial Data Transmission Vs Parallel Data Transmission: Unit 5Documento16 páginasSerial Data Transmission Vs Parallel Data Transmission: Unit 5achuu1987Ainda não há avaliações
- Minimum Maximum ModeDocumento29 páginasMinimum Maximum ModeVaibhav GodboleAinda não há avaliações
- The 8088 and 8086 Microprocessors: Their Memory and Input/Output InterfacesDocumento30 páginasThe 8088 and 8086 Microprocessors: Their Memory and Input/Output InterfacesNutan VarshneyAinda não há avaliações
- 8282,8286,8284Documento23 páginas8282,8286,8284Relan Soniia100% (1)
- Slide-4 (8086 Minimum Mode)Documento19 páginasSlide-4 (8086 Minimum Mode)Hafsaa Binte HarunAinda não há avaliações
- 8086 BUS CYCLE TIME STATESDocumento11 páginas8086 BUS CYCLE TIME STATESVineeth Valiyaveedu VijayanAinda não há avaliações
- Intel 8086/8088 Microprocessor Minimum and Maximum Mode OperationDocumento61 páginasIntel 8086/8088 Microprocessor Minimum and Maximum Mode Operationkshtgarg21Ainda não há avaliações
- Unit 5Documento26 páginasUnit 5veenayak sirohiAinda não há avaliações
- Microprocessor and embeded systems assignment 1 and 2Documento6 páginasMicroprocessor and embeded systems assignment 1 and 2panasheAinda não há avaliações
- 8086 System Bus StructureDocumento19 páginas8086 System Bus StructureArman IslamAinda não há avaliações
- 8086 Bus Cycle - System ConfigurationDocumento6 páginas8086 Bus Cycle - System ConfigurationWarrior PrinceAinda não há avaliações
- 8086 System Bus Structure ExplainedDocumento26 páginas8086 System Bus Structure Explainedabishek abiAinda não há avaliações
- 8284A Clock Generator ExplainedDocumento4 páginas8284A Clock Generator ExplainedJayashreedas1990Ainda não há avaliações
- Memory Interface and Pin Functions of 8086/8088 MicroprocessorDocumento15 páginasMemory Interface and Pin Functions of 8086/8088 Microprocessorpravin2275767Ainda não há avaliações
- Minimum & Maximum Mode SystemsDocumento15 páginasMinimum & Maximum Mode Systemsrajesh5500Ainda não há avaliações
- Unit 2 FinalDocumento31 páginasUnit 2 Finalswetha bagadi it's good but how it will workAinda não há avaliações
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationAinda não há avaliações
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Ainda não há avaliações
- Python Basics With Numpy v3Documento17 páginasPython Basics With Numpy v3Subash BasnyatAinda não há avaliações
- Openerp Developer BookDocumento135 páginasOpenerp Developer Bookamio_098Ainda não há avaliações
- Comprehensive Python CheatsheetDocumento56 páginasComprehensive Python CheatsheetSubash BasnyatAinda não há avaliações
- Python Basics With Numpy v3Documento17 páginasPython Basics With Numpy v3Subash BasnyatAinda não há avaliações
- Holistic Management ReviewDocumento47 páginasHolistic Management ReviewLD OM100% (1)
- Object, Decorator, DuckDocumento16 páginasObject, Decorator, DuckSubash BasnyatAinda não há avaliações
- Cheat SheetDocumento163 páginasCheat Sheetfatalist3Ainda não há avaliações
- Uibo Informaatika 2016Documento23 páginasUibo Informaatika 2016Williamette CoreAinda não há avaliações
- Model of Entrepreneurial Success: A Review and Research AgendaDocumento19 páginasModel of Entrepreneurial Success: A Review and Research AgendaSubash BasnyatAinda não há avaliações
- 1 Python Multithreading and Multiprocessing TutorialDocumento14 páginas1 Python Multithreading and Multiprocessing TutorialSubash BasnyatAinda não há avaliações
- How To Get Rich (Without Getting Lucky)Documento36 páginasHow To Get Rich (Without Getting Lucky)Maxim Averin100% (3)
- Multi-cursor shortcuts and editor management in VS CodeDocumento1 páginaMulti-cursor shortcuts and editor management in VS Codedario perezAinda não há avaliações
- Openerp Developer BookDocumento135 páginasOpenerp Developer Bookamio_098Ainda não há avaliações
- Cost Function - Intuition I - CourseraDocumento2 páginasCost Function - Intuition I - CourseraAmanda GamayaniAinda não há avaliações
- Lecture 1Documento27 páginasLecture 1Alex KourisAinda não há avaliações
- Openerp Developer BookDocumento135 páginasOpenerp Developer Bookamio_098Ainda não há avaliações
- Carrom RulesDocumento2 páginasCarrom RulesSubash BasnyatAinda não há avaliações
- NanoDegree AI SyllabusDocumento7 páginasNanoDegree AI SyllabusSubash BasnyatAinda não há avaliações
- 12 Prolog IntroDocumento5 páginas12 Prolog IntroDavid KiruiAinda não há avaliações
- Javascript ScriptDocumento1 páginaJavascript ScriptSubash BasnyatAinda não há avaliações
- Cheat SheetDocumento163 páginasCheat Sheetfatalist3Ainda não há avaliações
- Jim MorrisonDocumento7 páginasJim MorrisonSubash BasnyatAinda não há avaliações
- Two Assumptions Made On Jacobi Method:: 7.3 The Jacobi and Gauss-Seidel Iterative Methods The Jacobi MethodDocumento7 páginasTwo Assumptions Made On Jacobi Method:: 7.3 The Jacobi and Gauss-Seidel Iterative Methods The Jacobi MethodLân Võ ThànhAinda não há avaliações
- Jim Morrison's Lost Writings: Excerpts from Poems & DiariesDocumento30 páginasJim Morrison's Lost Writings: Excerpts from Poems & DiariesGesana Biti100% (3)
- Your Task: Prepare A Simple Report About The Data Types and Other Literals That Is Supported by The Mysql and Submit ItDocumento1 páginaYour Task: Prepare A Simple Report About The Data Types and Other Literals That Is Supported by The Mysql and Submit ItSubash BasnyatAinda não há avaliações
- Creation of an IDB for a 4+4+4 carrier configuration using OMTDocumento15 páginasCreation of an IDB for a 4+4+4 carrier configuration using OMTasemaamw workuAinda não há avaliações
- Access Methods For Mobile Networks - ShavaneDocumento2 páginasAccess Methods For Mobile Networks - ShavaneDrumz Staff50% (2)
- Method Statement For Structural Cabling System Testing and CommissioningDocumento14 páginasMethod Statement For Structural Cabling System Testing and CommissioningRommel Espinosa ParasAinda não há avaliações
- 2G-3G Alarm Mapping (Final) 1Documento8 páginas2G-3G Alarm Mapping (Final) 1Ehtesham Khan100% (1)
- Distributed Intelligence PlatformDocumento31 páginasDistributed Intelligence PlatformAfshinAinda não há avaliações
- Setting Up Usb Armory With A Windows ComputerDocumento5 páginasSetting Up Usb Armory With A Windows ComputerProod1934Ainda não há avaliações
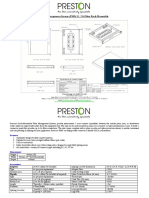
- 9 12, 24 Rack Mount LIU DatasheetDocumento2 páginas9 12, 24 Rack Mount LIU DatasheetBalakrishnan KrishnanAinda não há avaliações
- DVR KPD-674Documento2 páginasDVR KPD-674tomeeg18100% (1)
- Toshiba Satellite L200 - Inventec Miami 10Documento59 páginasToshiba Satellite L200 - Inventec Miami 10Deddy SuyantoAinda não há avaliações
- RHCEDocumento33 páginasRHCESuresh GaikwadAinda não há avaliações
- SMSDocumento16 páginasSMSrascal raccoonAinda não há avaliações
- Computer Organization and Assembly LanguageDocumento50 páginasComputer Organization and Assembly LanguageShane GaviolaAinda não há avaliações
- Mod Bus Master Reference 0.7Documento31 páginasMod Bus Master Reference 0.7Anugrah RadenAinda não há avaliações
- Exam 1Documento7 páginasExam 1api-4589123220% (1)
- Windfarm System Protection Using Peer-to-Peer CommunicationsDocumento6 páginasWindfarm System Protection Using Peer-to-Peer CommunicationsBranko MarjanovicAinda não há avaliações
- Renewable and Sustainable Energy Reviews: Jignesh Bhatt, Vipul Shah, Omkar JaniDocumento23 páginasRenewable and Sustainable Energy Reviews: Jignesh Bhatt, Vipul Shah, Omkar JaniThien LeAinda não há avaliações
- Catalog PrecisaDocumento25 páginasCatalog PrecisaAdrian MarinescuAinda não há avaliações
- HP Compaq 6300 Pro Business PC-Illustrated Parts and Service MapDocumento4 páginasHP Compaq 6300 Pro Business PC-Illustrated Parts and Service Mapalpha2003rolAinda não há avaliações
- Getting Started with Node-RED for IoT ProjectsDocumento22 páginasGetting Started with Node-RED for IoT ProjectsHisham MaznanAinda não há avaliações
- DTT Headend Block DiagramDocumento3 páginasDTT Headend Block DiagramPaul Paredes IIIAinda não há avaliações
- TEMPLATEDocumento6 páginasTEMPLATEaravindsnistAinda não há avaliações
- System Platform Getting StartedDocumento70 páginasSystem Platform Getting StartedLenin PachecoAinda não há avaliações
- Outdoor PTZ Camera (Axis Q6034-E)Documento2 páginasOutdoor PTZ Camera (Axis Q6034-E)Usman ZouqueAinda não há avaliações
- CmeauthDocumento80 páginasCmeauthjorigoni2013Ainda não há avaliações
- CCNP Interview QuestionsDocumento4 páginasCCNP Interview QuestionsSupriyo SahaAinda não há avaliações
- List of Command PromtDocumento34 páginasList of Command PromtferiferiAinda não há avaliações
- Minimal Requirements: Solaris InstallationDocumento74 páginasMinimal Requirements: Solaris InstallationsrinivasAinda não há avaliações
- MX2000 Series Ethernet Services Routers DatasheetDocumento8 páginasMX2000 Series Ethernet Services Routers DatasheetRoar ZoneAinda não há avaliações
- FTP - The File Transfer ProtocolDocumento3 páginasFTP - The File Transfer ProtocolGoodDayAinda não há avaliações
- 1.1 Introduction To InternetDocumento11 páginas1.1 Introduction To InternetJessiel Grace BaleñaAinda não há avaliações