Você também pode gostar
- A Mathematical Model For Calculating Cross-Sectional Properties of Modern Wind Turbine Composite BladesDocumento9 páginasA Mathematical Model For Calculating Cross-Sectional Properties of Modern Wind Turbine Composite BladesKaan GünayAinda não há avaliações
- A3930 1 Datasheet PDFDocumento21 páginasA3930 1 Datasheet PDFKaan GünayAinda não há avaliações
- An486 PDFDocumento10 páginasAn486 PDFKaan GünayAinda não há avaliações
- 8008fa - 72V Regulator PDFDocumento16 páginas8008fa - 72V Regulator PDFKaan GünayAinda não há avaliações
- An Optimum Setting of PID Controller For Boost Converter Using Bacterial Foraging Optimization TechniqueDocumento12 páginasAn Optimum Setting of PID Controller For Boost Converter Using Bacterial Foraging Optimization TechniqueNemanjaNeskovicAinda não há avaliações
- Theory: Figure X: 1DOF Mass Spring Damper SystemDocumento6 páginasTheory: Figure X: 1DOF Mass Spring Damper SystemKaan GünayAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Energy Storage For Solar PV BrochureDocumento4 páginasEnergy Storage For Solar PV BrochureVijay PrabhuAinda não há avaliações
- Iitians PaceDocumento8 páginasIitians PaceAditya DevAinda não há avaliações
- RLC Pre Lab Questions - SolutionsDocumento7 páginasRLC Pre Lab Questions - SolutionsJimmy ReeceAinda não há avaliações
- Module-for-AS-1-Introduction-to-Industrial-Arts ElectricalDocumento32 páginasModule-for-AS-1-Introduction-to-Industrial-Arts ElectricalJay-ar Castillo Watin Jr.Ainda não há avaliações
- Electrical Products Presentation - SI EPDocumento33 páginasElectrical Products Presentation - SI EPkassem WreidanAinda não há avaliações
- VC - HCA - Catalogue - 2009.4Documento20 páginasVC - HCA - Catalogue - 2009.4Razvan SasuAinda não há avaliações
- Schmersal Safety ControllersDocumento204 páginasSchmersal Safety Controllerssaul H QAinda não há avaliações
- Marechal DSN Plugs & Sockets Industrial Power Supply & Motor Connections (20 63A)Documento8 páginasMarechal DSN Plugs & Sockets Industrial Power Supply & Motor Connections (20 63A)rocketvtAinda não há avaliações
- Design Parameters of Electric Vehicle: February 2020Documento9 páginasDesign Parameters of Electric Vehicle: February 2020Tony JamesAinda não há avaliações
- De Tia-Pro1 en 01 V130100Documento433 páginasDe Tia-Pro1 en 01 V130100Ayub Anwar M-Salih100% (1)
- Eval-Rhrpmpol01: 7 A Monolithic Synchronous Switching RegulatorDocumento9 páginasEval-Rhrpmpol01: 7 A Monolithic Synchronous Switching Regulatorkishan2016Ainda não há avaliações
- Warning Caution: ECM3000 Control Motor User's ManualDocumento8 páginasWarning Caution: ECM3000 Control Motor User's ManualLukaszAinda não há avaliações
- LED Seminar PPT By, Er. Swapnil V. KawareDocumento14 páginasLED Seminar PPT By, Er. Swapnil V. Kawareswapnil50% (2)
- Brosur TransectorDocumento72 páginasBrosur TransectorPT Bumi Raya PerkasaAinda não há avaliações
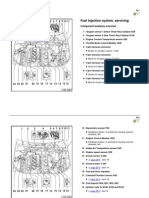
- VW Passat B5 24 Fuel Injection Sys, ServicingDocumento126 páginasVW Passat B5 24 Fuel Injection Sys, ServicingJosé Luis Ormeño100% (5)
- Highly Sensitive Piezo-Based Touch Sensor For Robotics ApplicationsDocumento12 páginasHighly Sensitive Piezo-Based Touch Sensor For Robotics ApplicationsEdgar MongeAinda não há avaliações
- EEHA Inspection Sheet TemplateDocumento3 páginasEEHA Inspection Sheet Templatedavid.bradley83Ainda não há avaliações
- Earthing: To The 16th Edition IEE RegulationsDocumento3 páginasEarthing: To The 16th Edition IEE RegulationsRakesh Kumar VermaAinda não há avaliações
- FWC 155Documento43 páginasFWC 155Brandon MendozaAinda não há avaliações
- Proteus Tutorial - Light Emitting Diode (LED) and Bar Graph DisplayDocumento7 páginasProteus Tutorial - Light Emitting Diode (LED) and Bar Graph DisplayGebBerheAinda não há avaliações
- Removal & Installation: Dashboard Switch Panel - RemoveDocumento4 páginasRemoval & Installation: Dashboard Switch Panel - RemovekavindaAinda não há avaliações
- Fluke 1621 Kit - Basic Earth Ground Tester: Características PrincipalesDocumento4 páginasFluke 1621 Kit - Basic Earth Ground Tester: Características PrincipaleswilliamAinda não há avaliações
- Quiz-Ohms Law-Series and ParallelDocumento1 páginaQuiz-Ohms Law-Series and ParallelGary NugasAinda não há avaliações
- BS en 60034-18!34!2012-08 - Rotating Electrical MachinesDocumento20 páginasBS en 60034-18!34!2012-08 - Rotating Electrical MachinesmlutfimaAinda não há avaliações
- Temples of African GodsDocumento10 páginasTemples of African Godsjeflinders80% (5)
- Electricity and Magnetism 8.02x, Mit, UsaDocumento540 páginasElectricity and Magnetism 8.02x, Mit, UsaRahul JaiswalAinda não há avaliações
- 23 - SSAS-Pro PMS-R1.0 - 081022Documento24 páginas23 - SSAS-Pro PMS-R1.0 - 081022secui marianAinda não há avaliações
- NE40E-X1&NE40E-X2 Installation Guide (V600R003C00 - 02) PDFDocumento201 páginasNE40E-X1&NE40E-X2 Installation Guide (V600R003C00 - 02) PDFcobs80Ainda não há avaliações
- Hardware Maintenance Manual: Thinkpad T550 and W550SDocumento112 páginasHardware Maintenance Manual: Thinkpad T550 and W550SMark MerrimanAinda não há avaliações
- PA Figure of MeritDocumento2 páginasPA Figure of MeritHimanshu PandeyAinda não há avaliações