Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Blasting and Mining PDFDocumento40 páginasBlasting and Mining PDFF Aguirre100% (2)
- Billion Dollar AgentDocumento396 páginasBillion Dollar AgentNelson L Salazar100% (3)
- The Loss of Space Shuttle Columbia PDFDocumento11 páginasThe Loss of Space Shuttle Columbia PDFMiguel MuchoAinda não há avaliações
- Terminal Velocity Gpo 4Documento4 páginasTerminal Velocity Gpo 4Miguel MuchoAinda não há avaliações
- Terminal Velocity Gpo 4Documento4 páginasTerminal Velocity Gpo 4Miguel MuchoAinda não há avaliações
- Leyenda: Carretera RIO Camino Afloramiento Rumbo Vivienda Puente BuzamientoDocumento1 páginaLeyenda: Carretera RIO Camino Afloramiento Rumbo Vivienda Puente BuzamientoMiguel MuchoAinda não há avaliações
- Let ReroDocumento1 páginaLet ReroMiguel MuchoAinda não há avaliações
- SME S Student Chapter BylawsDocumento4 páginasSME S Student Chapter BylawsMiguel MuchoAinda não há avaliações
- Pre Venta Perumin - Libros SmeDocumento1 páginaPre Venta Perumin - Libros SmeMiguel MuchoAinda não há avaliações
- Blast Design and Assessment For Surface Mines and Quarries Part 1: IntroductionDocumento5 páginasBlast Design and Assessment For Surface Mines and Quarries Part 1: IntroductionMiguel MuchoAinda não há avaliações
- SDC - Rules & Forms 2015-2016Documento16 páginasSDC - Rules & Forms 2015-2016Miguel MuchoAinda não há avaliações
- Chadwick 2007 SDocumento8 páginasChadwick 2007 SMiguel MuchoAinda não há avaliações
- Balance Antamina M1-2Documento20 páginasBalance Antamina M1-2Fernando Gonzales HernandezAinda não há avaliações
- Lamina 01 OkDocumento1 páginaLamina 01 OkMiguel MuchoAinda não há avaliações
- Drawing3 ModelDocumento1 páginaDrawing3 ModelMiguel MuchoAinda não há avaliações
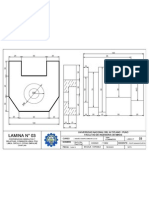
- Lamina 03 OkDocumento1 páginaLamina 03 OkMiguel MuchoAinda não há avaliações
- Strategic Human Resource Management-06!29!2015Documento9 páginasStrategic Human Resource Management-06!29!2015Georgiana BiancaAinda não há avaliações
- CSR PDFDocumento56 páginasCSR PDFSafayetChowdhuryAinda não há avaliações
- Bhupendra Offer LetterDocumento2 páginasBhupendra Offer LetterNikhil Deshpande100% (1)
- Dressing Sense and Employee MotivationDocumento53 páginasDressing Sense and Employee MotivationJnana Ranjan Pati100% (4)
- Bba 140Documento7 páginasBba 140Larry NamukambaAinda não há avaliações
- Module - 2 Notes FinalDocumento9 páginasModule - 2 Notes FinalJagadish SdAinda não há avaliações
- Euro AirDocumento2 páginasEuro AirambujsinhaAinda não há avaliações
- Fixed Term Contract Employment - Mozambique FTC For ReviewDocumento6 páginasFixed Term Contract Employment - Mozambique FTC For ReviewJeremias RaivaAinda não há avaliações
- Module 4Documento45 páginasModule 4Hajarath Prasad AbburuAinda não há avaliações
- The Nature of Organizations and Type of Organizations StructureDocumento27 páginasThe Nature of Organizations and Type of Organizations StructureMystixAinda não há avaliações
- Legal Principals and Normative Realities - A Study On Childerns Rights and Child Labour in IndiaDocumento15 páginasLegal Principals and Normative Realities - A Study On Childerns Rights and Child Labour in IndiaMouneeshAinda não há avaliações
- VUCA: Why Is Talent Management Important For Business Agility Talent-Management-Important-Business-Agility-Christoph-ThomaDocumento4 páginasVUCA: Why Is Talent Management Important For Business Agility Talent-Management-Important-Business-Agility-Christoph-ThomaAde Hanie100% (1)
- 2022 Tax ComputationDocumento7 páginas2022 Tax ComputationGeo Mosaic Diaz (Jiyu)Ainda não há avaliações
- 6 - People v. Sison - CauilanDocumento2 páginas6 - People v. Sison - Cauilanrommel alimagnoAinda não há avaliações
- CBSE Class 12 April12 Business Studies Syllabus 2023 24Documento23 páginasCBSE Class 12 April12 Business Studies Syllabus 2023 24Home Grown CreationAinda não há avaliações
- Article Workplace SpiritualityDocumento19 páginasArticle Workplace SpiritualityTricia Marie TumandaAinda não há avaliações
- Pro Hac Vice Motions Forthcoming: United States District Court District of New YorkDocumento29 páginasPro Hac Vice Motions Forthcoming: United States District Court District of New YorkMarloAinda não há avaliações
- Bachelor of Arts (Psychology HR Management) Y3 V2Documento1 páginaBachelor of Arts (Psychology HR Management) Y3 V2Kenny sylvainAinda não há avaliações
- The Art and Science of Competency ModelingDocumento16 páginasThe Art and Science of Competency ModelingAnurag Sharma100% (1)
- Emand and Upply in A Labour Market: Demand For LaborDocumento6 páginasEmand and Upply in A Labour Market: Demand For LaborIheti SamAinda não há avaliações
- Insider Threat Study: Illicit Cyber Activity Involving Fraud in The U.S. Financial Services SectorDocumento76 páginasInsider Threat Study: Illicit Cyber Activity Involving Fraud in The U.S. Financial Services SectorFabrice EpelboinAinda não há avaliações
- Research Paper On Mgnrega PDFDocumento5 páginasResearch Paper On Mgnrega PDFklbndecnd100% (1)
- Inequality in EqualityDocumento38 páginasInequality in Equalitymoses machiraAinda não há avaliações
- Performance Appraisal FormDocumento12 páginasPerformance Appraisal Formchins007Ainda não há avaliações
- Plws by JPPMDocumento45 páginasPlws by JPPMVaalu MuthuAinda não há avaliações
- Classroom Activity Personal Protective Equipment (PPE) Short Answer ExerciseDocumento2 páginasClassroom Activity Personal Protective Equipment (PPE) Short Answer ExerciseMAYMODERN STEELAinda não há avaliações
- TELEPHILIPPINES v. FERRANDO H. JACOLBEDocumento14 páginasTELEPHILIPPINES v. FERRANDO H. JACOLBEKristine Valerie BayotAinda não há avaliações
- Berlin Deutsche Energy Ag - Interview FormDocumento7 páginasBerlin Deutsche Energy Ag - Interview FormcristinaAinda não há avaliações
- Documentary Evidence RuleDocumento2 páginasDocumentary Evidence RuleJay Kent RoilesAinda não há avaliações