Você também pode gostar
- Read Serial Data Directly Into OctaveDocumento8 páginasRead Serial Data Directly Into OctavemadsonengAinda não há avaliações
- Serial Port Programming - ELinuxDocumento5 páginasSerial Port Programming - ELinuxSyed HussainiAinda não há avaliações
- Tutorial On Parallel Port InterfacingDocumento7 páginasTutorial On Parallel Port InterfacingVasilis TsekourasAinda não há avaliações
- A Tutorial On Parallel Port InterfacingDocumento8 páginasA Tutorial On Parallel Port InterfacingNurul Hanim OmarAinda não há avaliações
- Java Basics - Java Programming TutorialDocumento64 páginasJava Basics - Java Programming Tutorialrex tanongAinda não há avaliações
- Control An Arduino From JavaDocumento7 páginasControl An Arduino From JavaHarry PratamaAinda não há avaliações
- More: Systems Programming With Racket: Matthew FlattDocumento19 páginasMore: Systems Programming With Racket: Matthew FlattDeepanshu AbroalAinda não há avaliações
- Lab2: Unsigned/Signed Saturating Adder ObjectiveDocumento8 páginasLab2: Unsigned/Signed Saturating Adder Objectivea_patiar273Ainda não há avaliações
- Programming With PcapDocumento7 páginasProgramming With PcapwariszAinda não há avaliações
- Logging Data From Serial Ports: What Is A Serial Port?Documento6 páginasLogging Data From Serial Ports: What Is A Serial Port?adramat1085100% (1)
- LDmicro - Manual InglesDocumento17 páginasLDmicro - Manual InglesMoacyr_Jr0% (1)
- Serial Port rs232Documento35 páginasSerial Port rs232dokeosAinda não há avaliações
- A Tutorial On Parallel Port InterfacingDocumento10 páginasA Tutorial On Parallel Port InterfacingVeeresh M ShivarudrappaAinda não há avaliações
- StampPlot v39 PrimerDocumento18 páginasStampPlot v39 PrimerWallys SandiAinda não há avaliações
- SIMD TutorialDocumento17 páginasSIMD Tutorialzzal119911Ainda não há avaliações
- Serial Communication Starting Point - Developer Zone - National InstrumentsDocumento2 páginasSerial Communication Starting Point - Developer Zone - National InstrumentsPablo Mendez100% (1)
- Embedded C ProgrammingDocumento134 páginasEmbedded C Programmingshashankif100% (4)
- How To Automate Measurements With PythonDocumento8 páginasHow To Automate Measurements With PythonJoe Muller100% (1)
- 19MS012, EEE Submission, Datir PranavDocumento66 páginas19MS012, EEE Submission, Datir PranavKartik BhagatAinda não há avaliações
- Python and GPS TrackingDocumento12 páginasPython and GPS TrackingserfaryAinda não há avaliações
- What Is A Socket - 2Documento33 páginasWhat Is A Socket - 2asidieAinda não há avaliações
- Microcontroller Ethernet Interfacing Purpose: MAE 285 Laboratory #5Documento11 páginasMicrocontroller Ethernet Interfacing Purpose: MAE 285 Laboratory #5Avik SarkarAinda não há avaliações
- Flow Control (Handshaking) : Recognize DelDocumento5 páginasFlow Control (Handshaking) : Recognize DelCustardManAinda não há avaliações
- Using The Serial Port With A MATLAB GUIDocumento34 páginasUsing The Serial Port With A MATLAB GUIJeya RamanAinda não há avaliações
- Esc - 1991 - Vol2 - Page710 - Ward - Manipulating Hardware With CDocumento6 páginasEsc - 1991 - Vol2 - Page710 - Ward - Manipulating Hardware With CGiap LeAinda não há avaliações
- AvrospDocumento13 páginasAvrospmechaboy2Ainda não há avaliações
- Csci-E215 Assignment 3: Stty-Lite: Stty - Echo Olcuc Erase XDocumento2 páginasCsci-E215 Assignment 3: Stty-Lite: Stty - Echo Olcuc Erase XMarc LefebvreAinda não há avaliações
- Ladder Logic For PIC and AVRDocumento9 páginasLadder Logic For PIC and AVRCarlos Cesar MaiaAinda não há avaliações
- Light GearDocumento7 páginasLight GearJhon TacuriAinda não há avaliações
- Serial Port Programming Using Win32 APIDocumento8 páginasSerial Port Programming Using Win32 APIKhaled MedadhaAinda não há avaliações
- DiscussionDocumento10 páginasDiscussionapi-235910041Ainda não há avaliações
- Matlab and Modelsim LinkingDocumento13 páginasMatlab and Modelsim LinkingfkngmdrAinda não há avaliações
- Parallel PortDocumento3 páginasParallel PortJerry Halibas100% (1)
- A Bit of HistoryDocumento13 páginasA Bit of HistoryPavan KumarAinda não há avaliações
- Network ProgrammingDocumento23 páginasNetwork ProgrammingAntony JohnAinda não há avaliações
- Maxbox Starter 18: Start With Arduino ProgrammingDocumento13 páginasMaxbox Starter 18: Start With Arduino ProgrammingMax KleinerAinda não há avaliações
- RS232 Serial Communications With AVR MicrocontrollersDocumento3 páginasRS232 Serial Communications With AVR MicrocontrollersEngr Waqar Ahmed RajputAinda não há avaliações
- Serial Communication Using C# and Whidbey - CodeProject®Documento7 páginasSerial Communication Using C# and Whidbey - CodeProject®Sucharita JenaAinda não há avaliações
- VerilogDocumento80 páginasVeriloggenx142Ainda não há avaliações
- Parallel Port Control With Delphi - Parallel Port, Delphi, LPTPort, Device DriverDocumento8 páginasParallel Port Control With Delphi - Parallel Port, Delphi, LPTPort, Device DriverRhadsAinda não há avaliações
- Arduino-LED ProgrammingDocumento65 páginasArduino-LED ProgrammingnitinsomanathanAinda não há avaliações
- Algorithm: Terminal Defines The Starting and Ending Point of A FlowchartDocumento7 páginasAlgorithm: Terminal Defines The Starting and Ending Point of A FlowchartSofoniaAinda não há avaliações
- TechCorner 30 - Convert From ASCII To Ethernet or Serial in Just 15 Minutes!!Documento8 páginasTechCorner 30 - Convert From ASCII To Ethernet or Serial in Just 15 Minutes!!QuantumAutomationAinda não há avaliações
- Terminal SoftwareDocumento17 páginasTerminal SoftwareAchraf BourassAinda não há avaliações
- All About SocketsDocumento11 páginasAll About SocketsAlok SinghalAinda não há avaliações
- Coding With Arduino and RGB LED Maxbox - Starter18 - 3Documento15 páginasCoding With Arduino and RGB LED Maxbox - Starter18 - 3Max KleinerAinda não há avaliações
- Ethical Hacking and Digital ForensicsDocumento92 páginasEthical Hacking and Digital ForensicsJanvi WaghmodeAinda não há avaliações
- Fprintf Fprintf ( PHYS352') PHYS352 Fopen Id Fopen ( Datafile - TXT','W') R' W' Fopen IdDocumento5 páginasFprintf Fprintf ( PHYS352') PHYS352 Fopen Id Fopen ( Datafile - TXT','W') R' W' Fopen IdbaruaeeeAinda não há avaliações
- Threadbare Parallel Port DAQ CardDocumento16 páginasThreadbare Parallel Port DAQ CardPhạm Ngọc HòaAinda não há avaliações
- First Look at Ia32 Assembly LanguageDocumento14 páginasFirst Look at Ia32 Assembly LanguageArchana AgrawalAinda não há avaliações
- CD Lab ManualDocumento49 páginasCD Lab ManualPRIYA RAJI88% (17)
- Remote BOF ExplanationDocumento11 páginasRemote BOF Explanationlev bellAinda não há avaliações
- Maxbox Arduino Pascal MagazineDocumento8 páginasMaxbox Arduino Pascal MagazineMax KleinerAinda não há avaliações
- UprogDocumento21 páginasUprogJared TerroreAinda não há avaliações
- Experiment #4 Asynchronous Serial I/O, Parallel I/O, and InterruptsDocumento3 páginasExperiment #4 Asynchronous Serial I/O, Parallel I/O, and InterruptsErgin ÖzdikicioğluAinda não há avaliações
- Pure Code With Maxbox IntroductionDocumento16 páginasPure Code With Maxbox IntroductionMax KleinerAinda não há avaliações
- Arduino Ethernet Web Server With RelayDocumento8 páginasArduino Ethernet Web Server With RelayheavymezaAinda não há avaliações
- Handbook - Chairman's Message & PrefaceDocumento8 páginasHandbook - Chairman's Message & PrefacemakrsnakminesAinda não há avaliações
- Handbook ContentsDocumento7 páginasHandbook ContentsmakrsnakminesAinda não há avaliações
- Handbook Chapter2 FluidMechanicsDocumento11 páginasHandbook Chapter2 FluidMechanicsmakrsnakminesAinda não há avaliações
- Handbook TerminologyDocumento9 páginasHandbook TerminologymakrsnakminesAinda não há avaliações
- Handbook Chapter1 BasicsofHVACDocumento13 páginasHandbook Chapter1 BasicsofHVACmakrsnakminesAinda não há avaliações
- Handbook - Symbols, Subscripts & AcronymsDocumento7 páginasHandbook - Symbols, Subscripts & AcronymsmakrsnakminesAinda não há avaliações
- Siemens - PPCL (1) (Process Control Lang)Documento300 páginasSiemens - PPCL (1) (Process Control Lang)jfisher54Ainda não há avaliações
- Final 2002F: InterpolationDocumento3 páginasFinal 2002F: InterpolationmakrsnakminesAinda não há avaliações
- CEM BodyofKnowledge StudyGuideDocumento17 páginasCEM BodyofKnowledge StudyGuideJosé Julián SalazarAinda não há avaliações
- Bluetooth SetupDocumento6 páginasBluetooth SetupmakrsnakminesAinda não há avaliações
- Final Exam 1999S: Root FindingDocumento3 páginasFinal Exam 1999S: Root FindingmakrsnakminesAinda não há avaliações
- 32 03-KeaneDocumento14 páginas32 03-KeanemakrsnakminesAinda não há avaliações
- LEEDAPBDCv 2Documento13 páginasLEEDAPBDCv 2makrsnakminesAinda não há avaliações
- Conversion SheetDocumento13 páginasConversion SheetmakrsnakminesAinda não há avaliações
- K - P 10 T TF (K - P, (1500 K - P) ) Rlocus (T) : Published With MATLAB® R2014aDocumento1 páginaK - P 10 T TF (K - P, (1500 K - P) ) Rlocus (T) : Published With MATLAB® R2014amakrsnakminesAinda não há avaliações
- Steel An Do Brien I Clamp FittingsDocumento22 páginasSteel An Do Brien I Clamp FittingsmakrsnakminesAinda não há avaliações
- BDC Candidate Handbook 2017Documento19 páginasBDC Candidate Handbook 2017makrsnakminesAinda não há avaliações
- Fluid Bed Reactors: Chapter (Not in Book) CH EN 4393 Terry A. RingDocumento23 páginasFluid Bed Reactors: Chapter (Not in Book) CH EN 4393 Terry A. RingTuhin ShekharAinda não há avaliações
- Magnetic Flux Leakage Sensor Head For Coiled Tubing InspectionDocumento1 páginaMagnetic Flux Leakage Sensor Head For Coiled Tubing InspectionmakrsnakminesAinda não há avaliações
- PristineDocumento6.346 páginasPristinemakrsnakminesAinda não há avaliações
- Chapter 1-3 ProblemsDocumento1 páginaChapter 1-3 ProblemsmakrsnakminesAinda não há avaliações
- Books To FindDocumento1 páginaBooks To FindmakrsnakminesAinda não há avaliações
- FluidizaçãoDocumento14 páginasFluidizaçãomrenaultAinda não há avaliações
- Lead Scope Schedule MasterDocumento12 páginasLead Scope Schedule MastermakrsnakminesAinda não há avaliações
- VasyliMedical Rearfoot VarusDocumento3 páginasVasyliMedical Rearfoot VarusmakrsnakminesAinda não há avaliações
- The Orthopaedic Clinical Examination - B. Reider 2nd Ed - 2005Documento390 páginasThe Orthopaedic Clinical Examination - B. Reider 2nd Ed - 2005genotypic2963100% (4)
- Lecture Notes 1 RomkesDocumento5 páginasLecture Notes 1 RomkesmakrsnakminesAinda não há avaliações
- David Grewells Welding ReviewDocumento18 páginasDavid Grewells Welding ReviewmakrsnakminesAinda não há avaliações
- DSC: Differential Scanning CalorimetryDocumento44 páginasDSC: Differential Scanning CalorimetryMouad ArradAinda não há avaliações
- RSC Article Template-Mss - DaltonDocumento15 páginasRSC Article Template-Mss - DaltonIon BadeaAinda não há avaliações
- Vocabulary FceDocumento17 páginasVocabulary Fceivaan94Ainda não há avaliações
- Additional Article Information: Keywords: Adenoid Cystic Carcinoma, Cribriform Pattern, Parotid GlandDocumento7 páginasAdditional Article Information: Keywords: Adenoid Cystic Carcinoma, Cribriform Pattern, Parotid GlandRizal TabootiAinda não há avaliações
- Spare Part PhilosophyDocumento27 páginasSpare Part Philosophyavaisharma50% (2)
- Transparency and Digitalization in The Public Administration of RomaniaDocumento8 páginasTransparency and Digitalization in The Public Administration of RomaniaMădălina MarincaşAinda não há avaliações
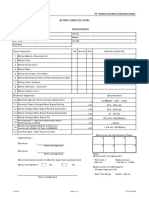
- Battery Checklist ProcedureDocumento1 páginaBattery Checklist ProcedureKrauser ChanelAinda não há avaliações
- MolnarDocumento8 páginasMolnarMaDzik MaDzikowskaAinda não há avaliações
- Xtype Power Train DTC SummariesDocumento53 páginasXtype Power Train DTC Summariescardude45750Ainda não há avaliações
- Tyler Nugent ResumeDocumento3 páginasTyler Nugent Resumeapi-315563616Ainda não há avaliações
- SavannahHarbor5R Restoration Plan 11 10 2015Documento119 páginasSavannahHarbor5R Restoration Plan 11 10 2015siamak dadashzadeAinda não há avaliações
- Essentials: Week by WeekDocumento18 páginasEssentials: Week by WeekHirenkumar ShahAinda não há avaliações
- Brosur YSIO X.preeDocumento20 páginasBrosur YSIO X.preeRadiologi RSUD KilisuciAinda não há avaliações
- Crisis of The World Split Apart: Solzhenitsyn On The WestDocumento52 páginasCrisis of The World Split Apart: Solzhenitsyn On The WestdodnkaAinda não há avaliações
- Ti05001 PDFDocumento1 páginaTi05001 PDFanggieAinda não há avaliações
- Operator'S Manual Diesel Engine: 2L41C - 2M41 - 2M41ZDocumento110 páginasOperator'S Manual Diesel Engine: 2L41C - 2M41 - 2M41ZMauricio OlayaAinda não há avaliações
- Table of Specification 1st QDocumento5 páginasTable of Specification 1st QVIRGILIO JR FABIAinda não há avaliações
- Unbound DNS Server Tutorial at CalomelDocumento25 páginasUnbound DNS Server Tutorial at CalomelPradyumna Singh RathoreAinda não há avaliações
- Beyond Models and Metaphors Complexity Theory, Systems Thinking and - Bousquet & CurtisDocumento21 páginasBeyond Models and Metaphors Complexity Theory, Systems Thinking and - Bousquet & CurtisEra B. LargisAinda não há avaliações
- At The Origins of Music AnalysisDocumento228 páginasAt The Origins of Music Analysismmmahod100% (1)
- Drager Narkomed 6400 Field Service Procedure Software Version 4.02 EnhancementDocumento24 páginasDrager Narkomed 6400 Field Service Procedure Software Version 4.02 EnhancementAmirAinda não há avaliações
- Sanskrit Subhashit CollectionDocumento110 páginasSanskrit Subhashit Collectionavinash312590% (72)
- Lab Manual Switchgear and Protection SapDocumento46 páginasLab Manual Switchgear and Protection SapYash MaheshwariAinda não há avaliações
- Working Capital Management 2012 of HINDALCO INDUSTRIES LTD.Documento98 páginasWorking Capital Management 2012 of HINDALCO INDUSTRIES LTD.Pratyush Dubey100% (1)
- Cool Fire Manual 45M620N2UK 01 PDFDocumento198 páginasCool Fire Manual 45M620N2UK 01 PDFPaun MihaiAinda não há avaliações
- European Construction Sector Observatory: Country Profile MaltaDocumento40 páginasEuropean Construction Sector Observatory: Country Profile MaltaRainbootAinda não há avaliações
- DN102-R0-GPJ-Design of Substructure & Foundation 28m+28m Span, 19.6m Width, 22m Height PDFDocumento64 páginasDN102-R0-GPJ-Design of Substructure & Foundation 28m+28m Span, 19.6m Width, 22m Height PDFravichandraAinda não há avaliações
- Functional Programming in Swift by Eidhof Chris, Kugler Florian, Swierstra Wouter.Documento212 páginasFunctional Programming in Swift by Eidhof Chris, Kugler Florian, Swierstra Wouter.angloesamAinda não há avaliações
- Extract The .Msi FilesDocumento2 páginasExtract The .Msi FilesvladimirAinda não há avaliações
- Cultural Sensitivity BPIDocumento25 páginasCultural Sensitivity BPIEmmel Solaiman AkmadAinda não há avaliações
- Principles of Supply Chain Management A Balanced Approach 4th Edition Wisner Solutions ManualDocumento36 páginasPrinciples of Supply Chain Management A Balanced Approach 4th Edition Wisner Solutions Manualoutlying.pedantry.85yc100% (28)