Escolar Documentos
Profissional Documentos
Cultura Documentos
PLC Variador de Velocidad - Ing K-NT
Enviado por
Edgar Prz K-ntTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
PLC Variador de Velocidad - Ing K-NT
Enviado por
Edgar Prz K-ntDireitos autorais:
Formatos disponíveis
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
ALUMNO:
EDGAR PREZ CANTE
PROFESOR:
EDUARDO BOCANEGRA MOO
GRADO Y GRUPO:
10 A
TEMA:
INVESTIGACIN
FECHA DE ENTREGA
7/10/2016
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Configuracin y comunicacin del PLC con controladores PID de procesos
industriales de diferente variables de control de lazo cerrado
Visin general de la tarea de automatizacin
La tarea de automatizacin consiste en configurar un bucle de control para influir
en los parmetros fsicos en un proceso tcnico, el bucle de control consta de los
siguientes elementos:
"PID_Compact" como el controlador
Procesos tcnicos simulados como sistema controlado
Descripcin de la tarea de automatizacin
La aplicacin debe cumplir los siguientes requisitos:
Configuracin y configuracin del controlador de software (bloque
"PID_Compact") debe ser explicado.
Se deben mostrar las opciones para optimizar el "PID_Compact".
El proceso de control debe ser operado y monitoreado va HMI.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Solucin
Descripcin general
Monitor: La siguiente figura muestra un resumen esquemtico de los componentes
ms importantes la solucin
Dentro de un lazo de control (aqu el sistema controlado PT1), el "PID_Compact"
el objeto de tecnologa detecta continuamente el valor real medido y compara este
valor al valor de consigna (especificado a travs de la HMI). A partir de la
desviacin de control resultante, el controlador calcula un valor de salida que
permite que el valor real alcance el valor de consigna tan rpido y estable como
posible.
El valor de salida del controlador PID consta de tres valores:
trmino P: El P-trmino del valor de salida aumenta proporcionalmente a la
desviacin de control.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
trmino: El trmino I del valor de salida aumenta hasta que se compensa la
desviacin de control.
trmino D: El trmino D aumenta con la velocidad de modificacin creciente
de la desviacin de control. El valor real se adapta al valor de consigna lo
ms rpidamente posible. Si el la velocidad de modificacin de la
desviacin de control disminuye de nuevo, el trmino D tambin
disminuyen.
La instruccin "PID_Compact" calcula automticamente los parmetros P, I y D
para su sistema controlado. Los parmetros pueden ser optimizados a travs del
ajuste fino. No es necesario determinar manualmente el parmetro.
Descripcin de la funcionalidad bsica
La funcionalidad principal de la aplicacin es la operacin de la "PID_Compact"
tecnologa a travs del HMI.
Descripcin y descripcin de la interfaz de usuario
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
La aplicacin se opera a travs de las siguientes 6 pantallas:
Vista de tendencias
Afinacin
Supervisin
Alarma ver
Configuracin
Simulacin
El funcionamiento de las interfaces de usuario se describir en detalle en el
documento.
Ventajas de esta solucin
La aplicacin le permite utilizar cualquier opcin de configuracin y puesta en
marcha a travs de un panel de operador KTP 900 Basic PN de 2 Generacin a
travs del HMI simulacin integrada en WinCC V13.
Esta aplicacin ofrece las siguientes ventajas:
Cambio entre modo automtico y manual
Curvas de tendencia de consigna, valor real y variable manipulada
Cambio entre el sistema controlado real y la simulacin
Control del valor de perturbacin en el modo de simulacin
Especificacin del comportamiento en caso de errores y su simulacin
Especificacin manual de parmetros de control y sintonizacin automtica
Supervisin en lnea del bloque de controlador "PID_Compact"
Modificacin de la configuracin durante el tiempo de ejecucin
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Componentes de hardware y software
Validez
Esta aplicacin es vlida para
STEP 7 V13 o superior
S7-1200 CPU Firmware V4.0 o superior
"PID_Compact" Objeto de tecnologa V2.2
Componentes utilizados
La aplicacin se cre con los siguientes componentes:
Componentes de hardware
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Componentes de software
Funcin de los Mecanismos
Informacin general
La siguiente figura muestra la secuencia de llamadas de bloque en la unidad de
control de la aplicacin proyecto.
La parte del proyecto de control consta de los bloques de organizacin:
Principal [OB1], desde donde se llama la funcin para la transferencia HMI
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Interrupcin cclica [OB200], que llama cclicamente al controlador
compacto cada 100 milisegundos a travs de los bloques de simulacin.
Los parmetros se transfieren entre las funciones con bloques de datos de
instancia:
PID_Compact_1 [DB1130]
PROG_C_DB [DB100]
As como los bloques de datos:
Etiquetas [DB1] (contiene todas las etiquetas no requeridas para la
simulacin del control sistema)
Simulation_tags [DB2] (contiene todas las etiquetas necesarias para la
simulacin del
Sistema controlado).
Principales [OB1]
La funcin para la transferencia HMI se llama desde el bloque de organizacin
"Principal".
HMI [FC1]
La funcin "HMI" define las etiquetas que el panel del operador requiere para la
pantalla animacin de objetos y elementos. Otras descripciones estn disponibles
en los encabezados de la red.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Interrupcin cclica [OB200]
El programa real (la llamada del controlador compacto "PID_Compact") tiene lugar
en el OB de alarma cclica, ya que los controles de software discretos deben ser
para optimizar la calidad del controlador. 100ms se establecieron como un
intervalo de tiempo constante para el tiempo de exploracin de OB200.
Resea del programa
Todo el circuito de control simulado se calcula en el OB de alarma cclica.
Explicaciones de configuracin
La funcin "Switch" le permite cambiar entre un sistema controlado real
(Evaluacin de la seal a travs de la periferia de control) o una simulacin del
control sistema.
Las seales seleccionadas se transfieren entonces al controlador compacto
"PID_Compact" como parmetros de entrada. A partir de la desviacin de control =
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
consigna - valor real, dependiendo de los parmetros PID, el controlador compacto
calcula el que se transfiere como una seal modulada en anchura de impulso a la
salidas de control de E / S analgicas o digitales.
La variable manipulada se transfiere al bloque "PROG_C" como un punto flotante
nmero. El bloque "PROG_C" simula un comportamiento del sistema PT1 y emite
el valor como un nmero de punto flotante, que se convierte en un valor analgico
a travs de "Scale_Real2Int".
En la simulacin de errores, el valor real se sobrescribe con el valor incorrecto (32768) y se transfiere a la entrada analgica simulada "Input_PER_simulated" de
El bloque "Switch". Adems, el valor analgico simulado se convierte en el punto
flotante correspondiente nmero para la entrada "Input_simulated" a travs de
"Scale_Int2Real".
Interruptor [FC5]
La funcin "Switch" se utiliza para conmutar entre la evaluacin de la seal a
travs del E / S de control y las seales de entrada simuladas calculadas para
controlador compacto "PID_Compact".
Interrupcin cclica [OB200]
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Nota: Todas las entradas deben ser asignadas (incluso si algunas no son
necesarias debido al controlador configuracin).
PID_Compact [FB1130]
STEP 7 V13 proporciona el objeto de tecnologa "PID_Compact" versin 2.2 con el
instalacin.
Este bloque funcional fue especialmente desarrollado para el control de
actuadores que actan proporcionalmente
Interrupcin cclica [OB200]
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
El controlador "PID_Compact" se llama en la "Interrupcin Cclica" (OB200).
Encontrar el bloque de datos de instancia DB1130 para "PID_Compact" en la
objetos "carpeta: Se puede abrir con el botn derecho del ratn -> "Abrir editor
DB". Aparte de las entradas y salidas, la aplicacin tambin accede a las etiquetas
estticas de "PID_Compact_1".
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Simulacin [FC2]
Desde la funcin "Simulacin", todas las funciones necesarias para simular la se
denominan:
PROC_C [FB100]
Scale_Real2Int [FC3]
Scale_Int2Real [FC4]
La "Simulacin" se llama en la misma interrupcin cclica que el "PID_Compact"
controlador compacto.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
PROC_C [FB100]
El bloque de funcin "PROC_C" simula el comportamiento continuo de un PT3
controlado sistema.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Interrupcin cclica [OB200]
El clculo del valor de salida se basa en la siguiente frmula:
En esta aplicacin, el bloque de simulacin del sistema controlado "PROC_C" est
diseado como controlado PT1 con un retardo de 3 segundos ( "TimeLag2" y
"TimeLag3" estn deshabilitados).
Escala_ Real2Int [FC3]
La funcin "Scale_Real2Int" se utiliza para la conversin lineal de un punto flotante
(Tipo de datos: Real) en un valor analgico (tipo de datos: Int) dentro de un valor
predefinido fronteras.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Los lmites de salida especificados "Int_max" y "Int_min" fueron definidos
intencionalmente como "Real", para garantizar la compatibilidad con los lmites
especificados en el bloque de datos de instancia "PID_Compact". La conversin
de la salida del sistema controlado en un valor analgico es Capaz de simular el
comportamiento en caso de error. Para un sistema controlado real, se produce un
error si falla el sensor de valor real (e.g. Debido a la rotura del alambre).
En la simulacin esto se consigue sobrescribiendo el valor real analgico con una
fuera del rango de medicin (-32768)
Scale_Int2Real [FC3]
La funcin "Scale_Int2Real" se utiliza para la conversin lineal de un valor
analgico (Tipo de datos: Int) en un nmero de punto flotante (tipo de datos: Real)
dentro de predefinido fronteras.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Nota: Los lmites de entrada especificados "Int_max" y "Int_min" fueron definidos
intencionalmente como "Real", para garantizar la compatibilidad con los lmites
especificados en el bloque de datos de instancia "PID_Compact"
Conversin del valor real analgico simulado en el punto flotante simulado el valor
real es necesario para poder simular el comportamiento en el caso de un error
incluso si se selecciona el valor real "input". Por lo tanto, incluso si se selecciona el
valor real "Entrada", la sobrescritura del se aplicar el valor actual con el valor 32768 en caso de error.
Instalacin y puesta en marcha
Adaptacin del hardware
Esta aplicacin se ha realizado con una CPU del producto SIMATIC S7-1200
familia. Cada CPU S7-1200 tiene 2 entradas analgicas integradas para la tensin
de recepcin seales de 0 a 10 V. Dependiendo del diseo del actuador
seleccionado, la configuracin de hardware de su S7-1200 puede necesitar
ajustes. Las opciones de configuracin del S7-1200 para el funcionamiento del
compacto "PID_Compact" controlador se presentan a continuacin.
Seal de entrada
La variable controlada se adquiere como un nmero de punto flotante adaptado
"Input" o como un valor analgico de las entradas / salidas "Input_PER". El
"PID_Compact" ofrece la conversin del valor analgico en la unidad fsica en la
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
pantalla de configuracin. A continuacin se enumeran los mdulos para la
adquisicin de valores analgicos.
Adquisicin de variables controladas
Adquisicin de variables controladas (temperatura)
Adaptacin de hardware
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Seal de salida
El controlador "PID_Compact" proporciona el control del actuador a travs de un
convertidor analgico salida o mediante una salida digital modulada en anchura de
impulso.
Salidas analgicas
Salidas digitales
Dependiendo del consumo de energa de su control digital de vlvulas, puede
elegir entre controladores S7-1200 con salidas de transistor o de rel:
SB = placa de seal (cada CPU tiene una ranura para una placa de seal)
SM = mdulo de seal
se pueden conectar hasta 2 mdulos de seal a la CPU 1212C
Se pueden conectar hasta 8 mdulos de seal a la CPU 1214C / 1215C /
1217C.
Ms informacin sobre la seleccin y el cableado de los componentes
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Disponible en el captulo A "Especificaciones tcnicas" del manual S7-1200 (\ 3 \).
Instalacin de hardware
La figura siguiente muestra la configuracin de hardware de la aplicacin.
Instalacin del hardware
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Gua de configuracin
Ajuste de la configuracin del dispositivo
Transferencia de direcciones de E / S
Dependiendo de la configuracin modificada, las direcciones de entrada o el
hardware agregado deben ser transferidas al programa. Esto se ilustra usando
una placa de seal 1232 AQ 1x12 bit como ejemplo:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Configuracin del controlador PID
La configuracin del objeto tecnolgico "PID_Compact" define la funcin principio
del controlador compacto. Los ajustes realizados determinan los valores iniciales
utilizados por el controlador PID cuando reiniciar despus de un arranque en fro o
en caliente (por ejemplo, fallo de alimentacin).
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Nota: Cualquier cambio de los valores iniciales de un bloque de datos slo se
aplicar como valores con la siguiente transicin STOP / RUN (no con tipos de
datos retentivos).
Puesta en marcha del controlador compacto
En el editor de puesta en servicio, configure el controlador compacto para durante
el arranque y para el ajuste automtico durante el funcionamiento. Los ajustes
realizados determinan los valores iniciales utilizados por el controlador PID cuando
reiniciar despus de un arranque en fro o en caliente (por ejemplo, fallo de
alimentacin).
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Nota: Los parmetros PID se almacenan de forma remanente en el bloque de
datos de controlador compacto "PID_Compact". Durante un arranque en caliente
(energa restaurada) los ltimos valores procesados permanecen. Los valores de
arranque slo se cargan durante el arranque en fro (transferencia del proyecto en
STOP o restablecimiento de memoria a travs de MRES).
Parte del proyecto HMI
Configuracin del HMI
Si el KTP900 Basic se utiliza como un panel de operador, la direccin IP
especfica del proyecto.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Carga de la parte del proyecto HMI en el KTP900 Basic
Para la transferencia, conecte su PG / PC al HMI directamente o utilizando el
CSM1277.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Inicio del tiempo de ejecucin del PC
Para usar la PG / PC como un panel de operador, inicie el tiempo de ejecucin de
la PC de la siguiente manera:
Cconfiguracin y comunicacin del PLC con variadores de frecuencia en
lazo cerrado desde el PLC
Control de un motor de induccin usando un variador de frecuencia
En este proyecto se describe como controlar un motor asncrono usando un
variador de frecuencia, y adems, como controlar ese variador de frecuencia
mediante un PLC. Los equipos usados son PLC S7-300 de Siemens y variador de
frecuencia Micromaster 420 de Siemens.
Los motores son ampliamente utilizados en la industria moderna, especialmente
los motores elctricos, debido a sus buenas caractersticas de rendimiento y a su
baja contaminacin (aspecto que se tiene muy en cuenta en nuestros das).
Adems estos motores suelen trabajar a velocidades variables para obtener la
mxima productividad en cada momento as como un importante ahorro
energtico. Por lo tanto es necesario un control riguroso de la velocidad para este
tipo de mquinas, entre las que cabe destacar cintas transportadoras, bombas,
ventiladores, ascensores.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Para realizar este control se usa el variador de frecuencia (tambin llamado
variador de velocidad o inversor), un equipo totalmente extendido en la industria.
Podemos hacer uso de un PLC que trabaje con el variador de frecuencia o actuar
directamente con l. En el mercado dispone de muchos fabricantes y modelos
para poder adaptar nuestro variador de frecuencia a las exigencias de la
aplicacin.
VARIADOR DE FRECUENCIA
En este apartado se describe en forma general un variador de frecuencia, as
como sus posibles aplicaciones en distintos campos de la industria. Adems el
variador de frecuencia que se menciona aqu es un Micromaster 420 de Siemens,
por ser un equipo de propsito general muy usado en nuestros das y de fcil
instalacin y manejo.
Qu es un variador de frecuencia?
Podemos definir un variador de frecuencia como un dispositivo electrnico capaz
de controlar completamente motores elctricos de induccin por medio del control
de la frecuencia de alimentacin suministrada. Cmo ya hablamos en el captulo
anterior, este equipo se centra en el control de la velocidad del motor variando la
frecuencia de la tensin de alimentacin. En las siguientes imgenes podemos ver
varios modelos que se comercializan actualmente.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Para comprender un poco mejor el funcionamiento de este equipo, vamos a
describir los bloques que lo componen as como sus topologas tpicas.
Esquema de un variador de frecuencia El diagrama de bloques de un variador de
frecuencia es:
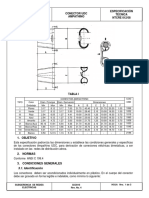
Variador de velocidad.
Un variador de c.a.. es un dispositivo utilizado para
controlar la velocidad de rotacin de un motor de c.a. o
de induccin. Este tipo de motores tambin se conocen
como motores asncronos o en jaula de ardilla.
El variador de velocidad se coloca entre la red y el motor.
El variador recibe la tensin de red a la frecuencia de red
(50Hz) y tras convertirla y despus ondularla produce
una tensin con frecuencia variable. La velocidad de un
motor va prcticamente proporcional a la frecuencia.
Figura 1 Variador de velocidades
Adems de cambiar la frecuencia, el variador tambin
vara el voltaje aplicado al motor para asegurar que existe el par necesario en el
eje del motor sin que surjan problemas de sobrecalentamiento.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
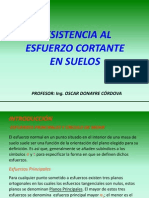
El manejo y control de las variables en un equipo de regulacin de frecuencia
pueden ser realizados de varias maneras. El mtodo ms simple de realizarlo, en
cuanto a conexionado, es el denominado modo local. Se realiza de forma manual
mediante el correspondiente panel de control incorporado en el propio variador. En
la figura se pueden observar paneles de control de diferentes variadores
comerciales.
Figura 2 Paneles de control de tres variadores de frecuencia.
Este tipo de control es adecuado para una aplicacin en la que no haya necesidad
de modificar los parmetros del variador de modo frecuente: se ajustan los valores
de acuerdo con el proceso a controlar, y no es necesario modificarlos salvo
desajustes de dicho proceso. No obstantes, las aplicaciones de este tipo son
minora entre las que emplean variador, cuya gran ventaja es precisamente la de
posibilitar variaciones de velocidad. El variador tambin se puede controlar en
modo remoto. Es adecuado para aplicaciones en los que los cambios de variables
del variador se realizan frecuentemente durante el proceso. Dichos cambios
pueden realizarse por parte del propio operario (mediante potencimetros,
interruptores, selectores rotativos o BCD, etc.). Sin embargo, la situacin ms
comn es que los parmetros del variador los establezca el equipo de control y
supervisin del proceso, al que est conectado el variador de frecuencia:
reguladores de tensin y/o corriente, finales de carrera, pantallas de operador,
etc., o incluso un ordenador personal y/o PLC. Para el caso de estos controles
remotos, la comunicacin se puede realizar de dos modos:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Mediante un nmero determinado de conductores, que depende de los elementos
que se tengan conectados al variador de frecuencia, por el que se transmiten
seales digitales (finales de carrera, interruptores, salidas digitales de un PLC), o
analgicas (potencimetro, salida analgica de un PLC):
Mediante un bus de comunicaciones industriales (de 2 o 4 hilos), sobre el que se
transmiten
mensajes
de
ajuste
de
parmetros
siguiendo
un
protocolo
preestablecido (Modbus, CanBus, ProfiBus, EtherCat, etc.). Con 2 conductores la
comunicacin se hace ms lenta (modo semidplex), pero lgicamente representa
un menor coste.
El equipo de control que regula el variador es, en la mayora de los casos, un PLC.
El conexionado del PLC con el proceso y otros elementos de control, a semejanza
del variador, se puede realizar asimismo mediante conexiones punto a punto, o
travs de buses de comunicaciones industriales. Este trabajo tiene como finalidad
el anlisis de ambas vas de transferencia de datos, mediante el citado bus de
datos o con la instalacin de mltiples conductores de interconexin.
Rectificador
La funcin del rectificador es convertir la seal de voltaje de alimentacin de CA a
CD y controlar el voltaje que llega al inversor. Los ms usados son:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Vemos que cada tipo de rectificador tiene diferentes caractersticas y posibilidades
a la hora de usar el inversor posteriormente. En la actualidad el rectificador ms
usado es el puente de diodos aunque tambin podemos encontrar los
rectificadores controlados en algunos equipos ms complejos. Entre el rectificador
y el inversor se usa un bus de continua, que no es ms que un circuito LC, para
almacenar y filtrar la seal rectificada y as obtener un valor de tensin continua
estable.
Inversor
Transforma la tensin continua que recibe del bus de continua en otra tensin y
frecuencia variables usando pulsos. Vamos a describir los dos inversores ms
usados.
Inversor de seis pasos
Para variar la frecuencia de la seal de alimentacin al motor se ajusta el tiempo
de conduccin de los SCRs para cada uno de los seis pasos, modificando el
tiempo de ciclo.
Cuando se usan SCRs en el inversor, se utilizan circuitos complejos de
conmutacin que no se muestran en la figura y que incluye la lgica de disparo y
componentes adicionales de potencia para apagarlos. Esta complejidad se reduce
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
cuando se utilizan IGBTs (Transistor Bipolar de Puerta Aislada) como
interruptores de potencia, como es el caso del siguiente inversor.
Inversor PWM
El inversor consiste de seis IGBTs que se encienden y apagan en una secuencia
tal que producen un voltaje en forma de pulsos cuadrados que alimentan al motor.
Para variar la frecuencia del motor, el nmero de pulsos y su ancho se ajustan
resultando en un tiempo de ciclo mayor para bajar la velocidad o tiempo de ciclo
menor para subir la velocidad. Para cada frecuencia especfica hay un nmero
ptimo de pulsos y anchos que producen la menor distorsin armnica en la
corriente que se aproxime a la seal senoidal. Adems existe una etapa de control
que es la encargada de activar o desactivar los IGBTs para crear la seal de
salida deseada.
Tambin tiene funciones de vigilancia de un correcto funcionamiento y
monitorizacin de tensiones, corriente. La frecuencia portadora de los IGBT se
encuentra entre 2 a 16 kHz. Una portadora con alta frecuencia reduce el ruido
acstico del motor pero disminuye el rendimiento. Por otra parte, los IGBTs
generan mayor calor. Las seales de control para arranque, parada y variacin de
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
velocidad estn aisladas galvnicamente para evitar daos en sensores o
controles y evitar ruidos en la etapa de control.
Seleccin del variador ptimo y recomendaciones
Tenemos a nuestra disposicin una gran cantidad de modelos de variadores y
debemos elegir el adecuado para cada proceso. Adems de las caractersticas del
motor, tambin debemos de tener en cuenta ciertos factores externos a la hora de
la seleccin. Esto es importante para obtener el mejor rendimiento al realizar la
tarea y no desaprovechar recursos.
Por tanto, debemos considerar al menos los siguientes factores:
Caractersticas del motor: Corriente y potencia nominal, rango de tensiones,
factor de potencia, velocidad mxima
Tipo de carga: Par constante, Par variable, Potencia constante
Par en el aranque: Asegurar que no supera lo permitido por el variador. A veces
es necesario sobredimensionar el variador por esta circunstancia.
Frenado regenerativo: Cargas de gran inercia, ciclos rpidos y movimientos
verticales requieren de resistencia de frenado exterior.
Condiciones ambientales: Temperatura ambiente, humedad, altura, tipo de
gabinete y ventilacin.
Aplicacin multimotor: Prever proteccin trmica individual para cada motor. La
suma de las potencias de todos los motores ser la nominal del variador.
Adems es recomendable aadir un circuito adicional para usar correctamente el
variador y tener un buen nivel de proteccin. Ese circuito debe constar de al
menos:
Interruptor automtico: Su eleccin est determinada por la corriente nominal
del variador si se tiene inductacia de lnea, o por la corriente de lnea si no se
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
tiene. La corriente de lnea corresponde a la corriente absorbida por el variador a
la potencia nominal de utilizacin, en una red de impedancia que
limite la
corriente de cortocircuito a:
12kA para una tensin de alimentacin de 208 V - 50/60Hz.
22kA para una tensin de alimentacin de 230 V - 50/60Hz.
22kA para una tensin de alimentacin de 400 V - 50Hz.
65kA para una tensin de alimentacin de 460 V - 60Hz.
Figura 3 Interruptor
Contactor de lnea: Este elemento garantiza un seccionamiento automtico del
circuito en caso de una emergencia o en paradas por fallos. Su uso junto con el
interruptor automtico garantiza la proteccin del variador y facilita las tareas de
puesta en marcha, explotacin y mantenimiento. La seleccin del contactor se
realiza en funcin de la potencia nominal y de la corriente nominal del motor.
Figura 4 Contacto de linea
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Inductancia de lnea: Estas inductancias garantizan una mejor proteccin contra
las sobretensiones de red y reducen el ndice de armnicos de corriente que
produce el variador. La inductancia de lnea est especialmente recomendada en
los siguientes casos:
Red muy perturbada por otros receptores (parsitos, sobretensiones).
Red de alimentacin con desequilibrio de tensin entre fases mayor al 1.8%
de la tensin nominal.
Instalacin de un nmero elevado de variadores de frecuencia en la misma
lnea.
La seleccin de la inductancia de lnea se hace de acuerdo a la corriente nominal
del variador y su frecuencia de conmutacin. Existen inductancias estndar para
cada variador.
Figura 5 Inductancia de lnea
Filtro de radio perturbaciones: Estos filtros permiten limitar la propagacin de
los parsitos que generan los variadores por conduccin, y que podran perturbar
a determinados receptores situados en las proximidades del aparato (radio,
televisin, sistemas de audio). Existen filtros estndar para cada tipo de variador
y algunos variadores los traen incorporados de origen, por lo que no es necesario
instalarlos.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Figura 6 Esquema general de la instalacin de un variador de frecuencia
El variador de frecuencia MICROMASTER 420
Introduccin
Como ya adelantamos anteriormente, vamos hacer especial hincapi en el
variador Micromaster 420 de Siemens. La gama de modelos disponible abarca
desde entrada monofsica de 120W a entrada trfsica de 11kW. Usan
microprocesadores para su control as como IGBTs para general su seal de
salida con modulacin PWM.
Tiene diferentes opciones para una comunicacin externa, como el PC, distintos
paneles y Profibus. Adems posee una extensa lista de parmetros por lo que
podemos usarlo en aplicaciones simples o para aplicaciones de control de motores
ms avanzadas.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Tambin incorpora medidas de proteccin para los siguientes casos:
Proteccin de sobretensin/mnima tensin.
Proteccin de sobretemperatura para el convertidor.
Proteccin de defecto a tierra.
Proteccin de cortocircuito.
Proteccin trmica del motor por I2t.
Datos tcnicos
Antes de comenzar a trabajar con el equipo debemos ver sus especificaciones
tcnicas, obtenidas del catlogo de Siemens.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Esquema de bloques de un Micromaster 420
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Instalacin
Dimensiones
En las siguientes imgenes podemos ver las dimensiones de los tres modelos de
la gama Micromaster 420:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Adems debemos considerar la instalacin elctrica recomendada en el cuadro
anterior ya que a la hora de elegir la zona donde situaremos los equipos, ya que
debe haber espacio suficiente para poder trabajar cmodamente con ellos.
Bornes
Para poder acceder a los bornes de red y del motor debemos retirar la tapa trasera
del variador. En la parte inferior se encontrarn los bornes del motor y en la
superior el resto. Los bornes del motor sern:
La instalacin general se har siguiendo el siguiente esquema:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Se indentifican fcilmente las lneas de alimentacin que llegan al variador (L1, L2
y L3) y las que llegan luego al motor (U, V, W).
A continuacin se detalla el resto de bornes, con su significado y sus
caractersticas:
Formas de evitar interferencias electromagnticas (EMI)
Estos variadores estn diseados para trabajar en entornor con grandes
interferencias electromagnticas, aunque siempre es bueno seguir unas directrices
para minimizar estas perturbaciones:
Asegurarse de conectar todos los aparatos del armario a tierra.
Conectar el equipo de control (PLC), unido al variador, al mismo punto de
tierra.
Conectar la tierra de los motores controlados por el variador directamente a
la conexin de tierra (PE) del variador asociado.
Es preferible utilizar conductores planos, ya que tienen menor impedancia a
altas frecuencias.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Terminar de forma limpia los extremos de los cables, asegurndose de que
los hilos no apantallados sean lo ms cortos posibles.
Mdulos de comunicacin
Para ciertas aplicaciones se requiere hacer uso de protocolos de comunicacin
que no estn incluidos de serie, para comunicar el variador con un PLC que lo
controle. Los tres mdulos de comunicacin ms usados son:
Mdulo Profibus
Nos proporciona una comunicacin usando el bus de campo PROFIBUS.
Podemos tener un acceso cclico a los parmetros del convertidor y a datos de
proceso. Soporta velocidades de 9,6 kBaud hasta 12 MBaud. El mdulo
PROFIBUS puede alimentarse externamente con DC 24 V, con lo que permanece
activo, incluso si el convertidor no est conectado a la red.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
El estndar PROFIBUS recoge cinco diferentes tecnologas de transmisin, que
son identificadas como:
RS-485. Utiliza un par de cobre trenzado apantallado, y permite velocidades
entre 9.6 kbit/s y 12 Mbit/s.
MBP. Manchester Coding y Bus Powered, es transmisin sincrnica con
una velocidad fija de 31.25 kbit/s.
RS-485 IS. Las versiones IS son intrnsicamente seguras, utilizadas en
zonas peligrosas (explosivas).
MBP IS
Fibra ptica. Incluye versiones de fibra de vidrio multimodo y monomodo,
fibra plstica y fibra HCS. Para usar otro tipo de conexin que no sea RS485, debemos usar un acoplador para adaptar las dos conexiones.
Ampliaremos la informacin sobre comunicacin usando el protocolo
PROFIBUS posteriormente, ya que es el modo elegido para comunicar
nuestro PLC con el variador de frecuencia.
Mdulo DeviceNet
Para la interconexin en red de los convertidores con el sistema de bus de campo
DeviceNet, muy extendido en el mercado americano. Se alcanzan velocidades de
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
transmisin de 500 kbaud, como mximo. La conexin al bus DeviceNet se
efecta a travs de un conector de 5 polos enchufable con bornes.
Mdulo CANopen
Con el mdulo de comunicacin CANopen, el convertidor puede conectarse en
una red con el sistema de bus de campo CANopen, lo que permite controlarlo a
distancia. Permite una velocidad de transmision de hasta 1Mbaud. El mdulo se
conecta con el sistema de bus mediante un conector tipo sub-D de 9 polos
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Parmetros Usamos los parmetros del variador para su configuracin y uso.
Existen dos tipos de parmetros, los que empiezan por r, que son solo de lectura,
y el resto empieza por p, los cuales podemos configurar y cambiar de valor. Los
parmetros tienen varias caractersticas para describirlos:
Nmero de parmetro: Los nmeros usados son de 4 dgitos del margen de 0000
a 9999. - Nombre del parmetro: Algunos nombres de parmetros incluyen los
siguientes prefijos: BI, BO, CI, CO.
BI: entrada binector, seleccionan la fuente de una seal binaria
BO: salida binector, conecta como una seal binaria
CI: entrada conector, selecciona la fuente de una seal analgica
CO: salida conector, el parmetro conecta como una salida
analgica
EstC: Estado de servicio de los parmetros. Son posibles tres estados:
Servicio: C
Listo para la marcha: U
En marcha: T
Esto indica cuando se pueden cambiar los parmetros. Se pueden especificar uno,
dos o los tres estados.
Grupo-P: Indica el grupo funcional de un parmetro en particular. Sus posibles
valores son: COMMANDS, SETPOINT, ALWAYS, ALARMS, MOTOR.
Tipos de datos: Mostramos los tipos de datos que se utilizan en la siguiente tabla:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
AUTMATA PROGRAMABLE
El PLC S7-300
Introduccin
Podramos describirlo como un controlador modular para la automatizacin de
tareas de un rango medio. Entre sus principales caractersticas podemos destacar:
Extensa seleccin de mdulos de E/S digitales y analgicos.
Comunicacin en red: MPI, PROFIBUS, PROFINET.
Mdulos
para
distintas
funciones
(conteo
de
alta
velocidad,
posicionamiento, control en lazo cerrado, control de cmara).
Programacin modular.
Dentro de la serie S7-300, disponemos de un amplio abanico a la hora de elegir la
CPU apropiada para nuestro trabajo de automatizacin, cada una de ella con
diferentes caractersticas tcnicas. Tenemos cuatro grandes tipos de CPU:
Estndar, Compactas, Seguridad y Tecnolgicas. Las CPUs estndar mas usadas
son:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
CPU 312. Para las soluciones bsicas.
CPU 314. Rango medio de E/S.
CPU 315-2 DP / CPU 315-2 PN/DP
Controlador estndar. Aplicaciones en el rango medio de actuacin. Interfaces
integradas para PROFINET/Ethernet y PROFIBUS-DP.
CPU 317-2 DP / CPU 317-2 PN/DP
CPU 319-3 PN/DP
Alto rendimiento para el tratamiento de datos. Mximo rango de actuacin.
Interfaces integradas para PROFINET/Ethernet y PROFIBUS-DP.
Para obtener todos sus datos tcnicos tenemos que ir a la documentacin del
fabricante, aunque podemos ver sus principales caractersticas en la siguiente
imagen:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Equipo elegido para la instalacin
A continuacin describiremos los diferentes mdulos necesarios para nuestra
aplicacin as como sus caractersticas tcnicas.
Fuente de alimentacin PS 307 2A
Esta fuente de alimentacin posee una intensidad mxima de salida de 2A con lo
que podremos alimentar los elementos que formaran el autmata programable sin
problemas. Entre otras caractersticas podemos destacar:
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Precauciones en la instalacin de un variador de velocidad.
Al instalar un variador hay que tomar una serie de precauciones que normalmente
se reflejan en los manuales de instalacin de los variadores. Destacamos los
siguientes.
Precaucin: Instalar un dispositivo de parada de emergencia externo que
posibilite la parada instantnea de la operacin y el corte de la alimentacin. En
caso de no instalar dicho dispositivo pueden producirse daos en personas.
Precaucin: Instalar el convertidor en una superficie vertical de tal forma que los
caracteres de la placa de caractersticas queden hacia arriba. Cuando se instale el
convertidor, dejar siempre espacio para permitir la disipacin natural del calor del
convertidor.
Precaucin: Instalar interruptores automticos externos y tomar otras medidas de
seguridad contra cortocircuito en el cableado externo. No hacerlo puede provocar
fuego.
Precaucin: Verificar que se aprietan correctamente los tornillos del bloque de
terminales para evitar que pueda producirse fuego o daos fsicos o materiales.
Precaucin: No conectar al revs el variador (confundir la entrada con la salida).
No conectar la fuente de alimentacin de c.a. a los terminales de salida U,V W,
pues se pueden provocar daos o malfuncionamientos del producto.
Precaucin: Respetar las tensiones e instensidades mxima de los equipos de
salida.
Comunicacin multipunto
Cuando la envergadura y/o complejidad de los procesos a automatizar aumentan,
se necesitan varios equipos de control de cada tipo de los comentados en
apartados anteriores. Tambin es usual que en los procesos ms complejos
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
intervengan tambin ordenadores de proceso o simplemente ordenadores de tipo
personal, que sirvan de almacenamiento de datos que permitan gestionar las
variabilidades de las piezas o equipos que se fabrican.
Otra razn, por lo que intervengan ordenadores en el procesos es por la solicitud y
tratamiento de datos para los controles de almacenamiento, de procesos de
fabricacin y/o de los sistemas de control de calidad. En estos casos, el volumen
de datos suele ser muy alto, aunque la velocidad de transmisin de los mismos no
requiere una velocidad elevada.
Para este tipo de aplicaciones hay una serie de buses de campo o de
informatizacin industrial que cumplen adecuadamente este servicio, aunque el
predominante es Ethernet. El montaje y conexionado de este tipo de buses es
similar al anterior, es decir a travs de conectares de tipo RJ u otros conectores
especficos, segn la marque de equipo a conectar, o incluso directamente en
bornero.
En todo caso suelen disponerse de una comunicacin a 4 hilos, de forma general.
Los equipos analizados en este trabajo, autmatas programables y variadores de
frecuencia, son tambin integrables en dichas redes de comunicaciones. Estas
redes soportan la conexin de un nmero elevado de equipos, bien directamente,
o bien mediante la particin en subredes de tamao ms reducido.
El funcionamiento o gestin de la informacin suele corresponderle a uno de los
autmatas programables que se instalan en la red. A este equipo se le denomina
maestro, y al resto se les denomina esclavos, a los que hay que identificar
(normalmente mediante la asignacin de un nmero identificativo). El PLC maestro
es el que gestiona el trfico de datos de la red, mediante el envo de peticiones a
cada esclavo, o la parametrizacin simultnea de todos ellos (por ejemplo para
establecer la hora del sistema), en modo broadcast. Normalmente lo
ordenadores que participen en el bus suelen utilizarse como elementos de
almacenamiento de datos y/o representacin de eventos.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Es muy clsico utilizar un PC donde se tenga instalado y ejecutado un programa
de supervisin y control, del tipo SCADA [6]. Algunas aplicaciones, poco usuales,
solo se comunican un variador de frecuencia y un ordenador personal. En estos
casos el ordenador tiene, o puede tener, la funcin de parametrizacin del variador
y representacin de las caractersticas de funcionamiento, tales como curvas de
carga, rampas de aceleracin, control de parada, etc.
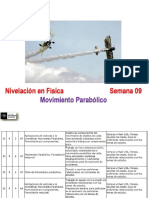
Aplicaciones con participacin de varios buses con diferentes niveles.
Hay aplicaciones donde se necesita de modo simultneo una alta velocidad de
transferencia de datos, y adems un gran volumen de datos. Para estos casos,
que cada da son ms frecuentes se tiene que recurrir a lo que se conoce como
estructuras de comunicacin piramidal, donde participan buses con todos los
tipos de niveles de comunicacin comentados. En el determinado nivel alto de la
comunicacin se instalan los ordenadores y al menos un equipo de control
(convencionalmente un autmata programable), que se encarga de gestionar la
comunicacin entre los diferentes niveles de comunicacin. En la figura, se
representa un esquema con los diferentes tipos de comunicaciones actuales. Hay
una amplia bibliografa referida a cualquier nivel de comunicacin ya comentado
incluso de relacin entre los diferentes niveles.
UNIVERSIDAD TECNOLGICA DE CAMPECHE
IngenieraenMecatrnica
Figura 7 Pirmide de comunicacin industrial
Você também pode gostar
- Semaforo CanteDocumento57 páginasSemaforo CanteEdgar Prz K-ntAinda não há avaliações
- Tarea Nueva de WilberthDocumento33 páginasTarea Nueva de WilberthEdgar Prz K-ntAinda não há avaliações
- Examen CanteDocumento5 páginasExamen CanteEdgar Prz K-ntAinda não há avaliações
- Semaforo Con HMIDocumento12 páginasSemaforo Con HMIEdgar Prz K-ntAinda não há avaliações
- Tarea de Wilberth 3 UnidadDocumento39 páginasTarea de Wilberth 3 UnidadEdgar Prz K-ntAinda não há avaliações
- Libro 3Documento26 páginasLibro 3Edgar Prz K-ntAinda não há avaliações
- ModbusDocumento103 páginasModbusEdgar Prz K-ntAinda não há avaliações
- Po Ten Cio MetroDocumento12 páginasPo Ten Cio MetroEdgar Prz K-ntAinda não há avaliações
- Integradora Ramos, Cocon, Perez, Cante 10b 10aDocumento44 páginasIntegradora Ramos, Cocon, Perez, Cante 10b 10aEdgar Prz K-ntAinda não há avaliações
- Libro 2Documento49 páginasLibro 2Edgar Prz K-ntAinda não há avaliações
- Unidad 1Documento65 páginasUnidad 1Edgar Prz K-ntAinda não há avaliações
- ReporteDocumento11 páginasReporteEdgar Prz K-ntAinda não há avaliações
- Unidad 2Documento32 páginasUnidad 2Edgar Prz K-ntAinda não há avaliações
- Libro 4Documento7 páginasLibro 4Edgar Prz K-ntAinda não há avaliações
- Perez Cante Edgar 9aDocumento23 páginasPerez Cante Edgar 9aEdgar Prz K-ntAinda não há avaliações
- Perez Cante Edgar - FuzzyDocumento21 páginasPerez Cante Edgar - FuzzyEdgar Prz K-ntAinda não há avaliações
- Tarea 13 MarioDocumento14 páginasTarea 13 MarioEdgar Prz K-ntAinda não há avaliações
- Sistema de ControlDocumento15 páginasSistema de ControlEdgar Prz K-ntAinda não há avaliações
- Tarea 13. 3Documento13 páginasTarea 13. 3Edgar Prz K-ntAinda não há avaliações
- Tarea 12 MarioDocumento9 páginasTarea 12 MarioEdgar Prz K-ntAinda não há avaliações
- Tarea de Wilberth 4 UnidadDocumento32 páginasTarea de Wilberth 4 UnidadEdgar Prz K-ntAinda não há avaliações
- Tarea 13. 4Documento16 páginasTarea 13. 4Edgar Prz K-ntAinda não há avaliações
- Tarea 10 MarioDocumento6 páginasTarea 10 MarioEdgar Prz K-ntAinda não há avaliações
- Tarea 9Documento10 páginasTarea 9Edgar Prz K-ntAinda não há avaliações
- Tarea 6 MarioDocumento14 páginasTarea 6 MarioEdgar Prz K-ntAinda não há avaliações
- ReporteDocumento11 páginasReporteEdgar Prz K-ntAinda não há avaliações
- Guia ProcessingDocumento26 páginasGuia ProcessingEdgar Prz K-ntAinda não há avaliações
- Sistema de ControlDocumento15 páginasSistema de ControlEdgar Prz K-ntAinda não há avaliações
- Control de PresionDocumento16 páginasControl de PresionEdgar Prz K-ntAinda não há avaliações
- 1-Plano Electrico Sistema de BombasDocumento30 páginas1-Plano Electrico Sistema de Bombasomar zaquinaulaAinda não há avaliações
- S13 - PPT - Ecuación de La RectaDocumento39 páginasS13 - PPT - Ecuación de La RectaJosue CordovaAinda não há avaliações
- Sentimientos ContradictoriosDocumento3 páginasSentimientos ContradictoriosIvan Ortiz LopezAinda não há avaliações
- Co-Ht - Sika WaterbarDocumento4 páginasCo-Ht - Sika WaterbarEmmanuel GomezAinda não há avaliações
- Deformaciones ProgramadasDocumento5 páginasDeformaciones Programadasmanolin969100% (1)
- Guion para El VideoDocumento3 páginasGuion para El Videono manches we :vAinda não há avaliações
- IEI Tema 2Documento59 páginasIEI Tema 2BorjaAinda não há avaliações
- Capítulo 00 GD Introducción 2021-IIDocumento47 páginasCapítulo 00 GD Introducción 2021-IIGianella GuerraAinda não há avaliações
- Inversion de GrashofDocumento5 páginasInversion de GrashofLuis Angel Ortega MárquezAinda não há avaliações
- ConectorAmpathinoEspecificaciónDocumento3 páginasConectorAmpathinoEspecificaciónVallejos FranzAinda não há avaliações
- Guia MagnetismoIDocumento4 páginasGuia MagnetismoIPiruloSanchezAinda não há avaliações
- Resistencia al corte en suelos: criterio de Mohr-CoulombDocumento76 páginasResistencia al corte en suelos: criterio de Mohr-CoulombWilliam Hernandez VargasAinda não há avaliações
- Presentación CfeDocumento33 páginasPresentación CfeEncuestas CalidadAinda não há avaliações
- La Creación de Los Océanos AzulesDocumento20 páginasLa Creación de Los Océanos AzuleserikaAinda não há avaliações
- Instructivos de mantenimiento eléctrico, mecánico y lubricaciónDocumento5 páginasInstructivos de mantenimiento eléctrico, mecánico y lubricaciónSebastian Tovar100% (3)
- Operating Manual Rotary Tissue Processor (ESP)Documento23 páginasOperating Manual Rotary Tissue Processor (ESP)andreapasitos8340Ainda não há avaliações
- Previo 7 Circuitos Eléctricos IDocumento7 páginasPrevio 7 Circuitos Eléctricos IFranz Lozano Torres100% (1)
- Ondas de RayleighDocumento36 páginasOndas de RayleighNick Ramos ChavezAinda não há avaliações
- Informe de ProyectosDocumento30 páginasInforme de ProyectosJeff PGAinda não há avaliações
- Evaluación Fisica 1o 3-2 y 3-3Documento6 páginasEvaluación Fisica 1o 3-2 y 3-3Santiago ReyesAinda não há avaliações
- Fisica Semana 9Documento38 páginasFisica Semana 9racoAinda não há avaliações
- Noria NuevaDocumento9 páginasNoria NuevaElias JimenezAinda não há avaliações
- Radiologia SedieDocumento102 páginasRadiologia Sedielookingfor1deaAinda não há avaliações
- Informe Tension Toque y PasoDocumento24 páginasInforme Tension Toque y PasoAlex PAAinda não há avaliações
- Añacua Vs Itati-ItacoraDocumento8 páginasAñacua Vs Itati-ItacoraGuillermo Lopez-FloresAinda não há avaliações
- Las Funciones y Sus VariablesDocumento8 páginasLas Funciones y Sus VariablesAna Victoria Fonseca Soto100% (1)
- Guia de Ejercicios Con La Ecuacion de DARCY PDFDocumento3 páginasGuia de Ejercicios Con La Ecuacion de DARCY PDFCarlos IgnacioAinda não há avaliações
- 1.manual Usuarios Creación Bodegas SByEDocumento32 páginas1.manual Usuarios Creación Bodegas SByEFernando SánchezAinda não há avaliações
- Quimica Inorganica Descriptiva - Rayner-ComprimidoDocumento10 páginasQuimica Inorganica Descriptiva - Rayner-ComprimidoJhon PinedaAinda não há avaliações
- Problemas de Funciones LinealesDocumento2 páginasProblemas de Funciones LinealesAlicia Cucalòn100% (1)