Você também pode gostar
- Program Comments Network Title Network CommentDocumento3 páginasProgram Comments Network Title Network CommentUsep SiregarAinda não há avaliações
- Slide 7 SFB 1Documento14 páginasSlide 7 SFB 1Usep SiregarAinda não há avaliações
- Manual - Solutions-Electrical Machines, Drives and Power Systems 6th Ed. by WildiDocumento109 páginasManual - Solutions-Electrical Machines, Drives and Power Systems 6th Ed. by WildiLeonardo Lira100% (3)
- Control Systems PID Review State Space ApproachDocumento6 páginasControl Systems PID Review State Space ApproachUsep SiregarAinda não há avaliações
- Control Systems PID Review State Space ApproachDocumento6 páginasControl Systems PID Review State Space ApproachUsep SiregarAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Plato Aristotle Virtue Theory HappinessDocumento17 páginasPlato Aristotle Virtue Theory HappinessMohd SyakirAinda não há avaliações
- RAGHAV Sound DesignDocumento16 páginasRAGHAV Sound DesignRaghav ChaudhariAinda não há avaliações
- Manual For The MCPL Programming LanguageDocumento74 páginasManual For The MCPL Programming Languagechri1753Ainda não há avaliações
- Livros Vet LinksDocumento12 páginasLivros Vet LinksÉrica RebeloAinda não há avaliações
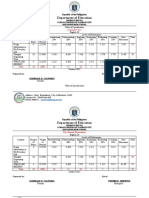
- Table of Specification ENGLISHDocumento2 páginasTable of Specification ENGLISHDonn Abel Aguilar IsturisAinda não há avaliações
- Fiber Optic Communication PDFDocumento2 páginasFiber Optic Communication PDFluisperikoAinda não há avaliações
- Modal Analysis of Honeycomb Structure With Variation of Cell SizeDocumento3 páginasModal Analysis of Honeycomb Structure With Variation of Cell Sizeprateekg92Ainda não há avaliações
- Roland Barthes and Struggle With AngelDocumento8 páginasRoland Barthes and Struggle With AngelAbdullah Bektas0% (1)
- Radical Candor: Fully Revised and Updated Edition: How To Get What You Want by Saying What You Mean - Kim ScottDocumento5 páginasRadical Candor: Fully Revised and Updated Edition: How To Get What You Want by Saying What You Mean - Kim Scottzafytuwa17% (12)
- CV Raman's Discovery of the Raman EffectDocumento10 páginasCV Raman's Discovery of the Raman EffectjaarthiAinda não há avaliações
- Key Note Units 3-4Documento4 páginasKey Note Units 3-4Javier BahenaAinda não há avaliações
- Worksheet 9-2 - Math 7Documento2 páginasWorksheet 9-2 - Math 7bfbrfvlfrerAinda não há avaliações
- Moment Baseplate DesignDocumento10 páginasMoment Baseplate DesignNeil JonesAinda não há avaliações
- Laxmi Thakur (17BIT0384) Anamika Guha (18BIT0483) : Submitted byDocumento6 páginasLaxmi Thakur (17BIT0384) Anamika Guha (18BIT0483) : Submitted byLaxmi ThakurAinda não há avaliações
- BUDDlab Volume2, BUDDcamp 2011: The City of Euphemia, Brescia / ItalyDocumento34 páginasBUDDlab Volume2, BUDDcamp 2011: The City of Euphemia, Brescia / ItalyThe Bartlett Development Planning Unit - UCLAinda não há avaliações
- Past Papers - A Levels - Geography (9696) - 2018 - GCE GuideDocumento9 páginasPast Papers - A Levels - Geography (9696) - 2018 - GCE GuideLee AsaAinda não há avaliações
- Circle Midpoint Algorithm - Modified As Cartesian CoordinatesDocumento10 páginasCircle Midpoint Algorithm - Modified As Cartesian Coordinateskamar100% (1)
- 10 1016@j Ultras 2016 09 002Documento11 páginas10 1016@j Ultras 2016 09 002Ismahene SmahenoAinda não há avaliações
- NIT JRF OpportunityDocumento4 páginasNIT JRF Opportunitybalaguru78Ainda não há avaliações
- Mosek UserguideDocumento81 páginasMosek UserguideadethroAinda não há avaliações
- MBA Study On Organisational Culture and Its Impact On Employees Behaviour - 237652089Documento64 páginasMBA Study On Organisational Culture and Its Impact On Employees Behaviour - 237652089sunitha kada55% (20)
- Design Theory: Boo Virk Simon Andrews Boo - Virk@babraham - Ac.uk Simon - Andrews@babraham - Ac.ukDocumento33 páginasDesign Theory: Boo Virk Simon Andrews Boo - Virk@babraham - Ac.uk Simon - Andrews@babraham - Ac.ukuzma munirAinda não há avaliações
- Lasers OpDocumento6 páginasLasers OpAndrian PrimadyaAinda não há avaliações
- IS BIOCLIMATIC ARCHITECTURE A NEW STYLE OF DESIGNDocumento5 páginasIS BIOCLIMATIC ARCHITECTURE A NEW STYLE OF DESIGNJorge DávilaAinda não há avaliações
- Physical Properties of Sea WaterDocumento45 páginasPhysical Properties of Sea WaterjisuAinda não há avaliações
- L16 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiDocumento25 páginasL16 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiMehul VarshneyAinda não há avaliações
- Relay Testing Management SoftwareDocumento10 páginasRelay Testing Management Softwarechichid2008Ainda não há avaliações
- Clinic Management System (24 PGS)Documento24 páginasClinic Management System (24 PGS)pranithAinda não há avaliações
- Rhythm Music and Education - Dalcroze PDFDocumento409 páginasRhythm Music and Education - Dalcroze PDFJhonatas Carmo100% (3)