Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Catalog Celule Siemens 8DJHDocumento80 páginasCatalog Celule Siemens 8DJHAlexandru HalauAinda não há avaliações
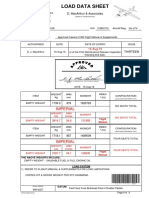
- Load Data Sheet: ImperialDocumento3 páginasLoad Data Sheet: ImperialLaurean Cub BlankAinda não há avaliações
- FIRE FIGHTING ROBOT (Mini Project)Documento21 páginasFIRE FIGHTING ROBOT (Mini Project)Hisham Kunjumuhammed100% (2)
- Tivoli Performance ViewerDocumento4 páginasTivoli Performance ViewernaveedshakurAinda não há avaliações
- GR L-38338Documento3 páginasGR L-38338James PerezAinda não há avaliações
- Star Link SafetyDocumento2 páginasStar Link SafetyJeronimo FernandezAinda não há avaliações
- Basic DfwmacDocumento6 páginasBasic DfwmacDinesh Kumar PAinda não há avaliações
- Unit-5 Shell ProgrammingDocumento11 páginasUnit-5 Shell ProgrammingLinda BrownAinda não há avaliações
- PCDocumento4 páginasPCHrithik AryaAinda não há avaliações
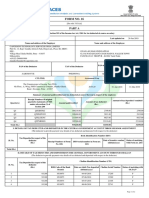
- Form16 2018 2019Documento10 páginasForm16 2018 2019LogeshwaranAinda não há avaliações
- Aluminum 3003-H112: Metal Nonferrous Metal Aluminum Alloy 3000 Series Aluminum AlloyDocumento2 páginasAluminum 3003-H112: Metal Nonferrous Metal Aluminum Alloy 3000 Series Aluminum AlloyJoachim MausolfAinda não há avaliações
- SBL - The Event - QuestionDocumento9 páginasSBL - The Event - QuestionLucio Indiana WalazaAinda não há avaliações
- 1400 Service Manual2Documento40 páginas1400 Service Manual2Gabriel Catanescu100% (1)
- Anaphylaxis Wallchart 2022Documento1 páginaAnaphylaxis Wallchart 2022Aymane El KandoussiAinda não há avaliações
- Uppsc Ae GSDocumento18 páginasUppsc Ae GSFUN TUBEAinda não há avaliações
- Labstan 1Documento2 páginasLabstan 1Samuel WalshAinda não há avaliações
- Information Security Chapter 1Documento44 páginasInformation Security Chapter 1bscitsemvAinda não há avaliações
- Difference Between Mountain Bike and BMXDocumento3 páginasDifference Between Mountain Bike and BMXShakirAinda não há avaliações
- Doterra Enrollment Kits 2016 NewDocumento3 páginasDoterra Enrollment Kits 2016 Newapi-261515449Ainda não há avaliações
- The Electricity Act - 2003Documento84 páginasThe Electricity Act - 2003Anshul PandeyAinda não há avaliações
- CA Inter Group 1 Book November 2021Documento251 páginasCA Inter Group 1 Book November 2021VISHAL100% (2)
- Missouri Courts Appellate PracticeDocumento27 páginasMissouri Courts Appellate PracticeGeneAinda não há avaliações
- LOG-2-8-FLEETWAREHOUSE-TEMPLATE-Waybill-Delivery Note-IFRCDocumento1 páginaLOG-2-8-FLEETWAREHOUSE-TEMPLATE-Waybill-Delivery Note-IFRCMAinda não há avaliações
- TLE - IA - Carpentry Grades 7-10 CG 04.06.2014Documento14 páginasTLE - IA - Carpentry Grades 7-10 CG 04.06.2014RickyJeciel100% (2)
- Dissertation On Indian Constitutional LawDocumento6 páginasDissertation On Indian Constitutional LawCustomPaperWritingAnnArbor100% (1)
- Oem Functional Specifications For DVAS-2810 (810MB) 2.5-Inch Hard Disk Drive With SCSI Interface Rev. (1.0)Documento43 páginasOem Functional Specifications For DVAS-2810 (810MB) 2.5-Inch Hard Disk Drive With SCSI Interface Rev. (1.0)Farhad FarajyanAinda não há avaliações
- MRT Mrte MRTFDocumento24 páginasMRT Mrte MRTFJonathan MoraAinda não há avaliações
- NOP PortalDocumento87 páginasNOP PortalCarlos RicoAinda não há avaliações
- Lab Session 7: Load Flow Analysis Ofa Power System Using Gauss Seidel Method in MatlabDocumento7 páginasLab Session 7: Load Flow Analysis Ofa Power System Using Gauss Seidel Method in MatlabHayat AnsariAinda não há avaliações
- LMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesDocumento2 páginasLMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesRobert MateoAinda não há avaliações