Você também pode gostar
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Operational Amplifier Circuits: Analysis and DesignNo EverandOperational Amplifier Circuits: Analysis and DesignNota: 4.5 de 5 estrelas4.5/5 (2)
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Ainda não há avaliações
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsNo EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsNota: 3.5 de 5 estrelas3.5/5 (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDocumento10 páginasLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasAinda não há avaliações
- Single Phase To Three Phase ConverterDocumento5 páginasSingle Phase To Three Phase ConverterGabriel MejiaAinda não há avaliações
- Design and Implementation of Multiple Output Switch Mode Power SupplyDocumento6 páginasDesign and Implementation of Multiple Output Switch Mode Power SupplyseventhsensegroupAinda não há avaliações
- Earthing Systems in Electrical Supply - Peter Witt - TESLA INSTITUTEDocumento30 páginasEarthing Systems in Electrical Supply - Peter Witt - TESLA INSTITUTEAmine Etude100% (2)
- PWMDocumento16 páginasPWMRICHIHOTS2100% (2)
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocumento14 páginasPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeAinda não há avaliações
- Induction Cooker Circuit DesignDocumento39 páginasInduction Cooker Circuit DesignMr. Pushparaj Ghodke75% (32)
- Business Process MappingDocumento14 páginasBusiness Process MappinghanxinAinda não há avaliações
- Voltage To Frequency Converter Folosind Ci 555 TimerDocumento11 páginasVoltage To Frequency Converter Folosind Ci 555 TimerAl ZanoagaAinda não há avaliações
- TechRef RectifierDocumento28 páginasTechRef RectifierАлишер ГалиевAinda não há avaliações
- ANSI-IEEE 1010-1987 Guide For Control of Hydroe PDFDocumento106 páginasANSI-IEEE 1010-1987 Guide For Control of Hydroe PDFDave ChaudhuryAinda não há avaliações
- Analog IC Design With Low-Dropout RegulatorsDocumento374 páginasAnalog IC Design With Low-Dropout Regulatorsberbou100% (2)
- Regulated DC Power Supply Lab AssignmentDocumento17 páginasRegulated DC Power Supply Lab AssignmentSebastien Paul100% (1)
- Teleprotection Over IP MPLS Network White PaperDocumento23 páginasTeleprotection Over IP MPLS Network White PaperLakshmi Kiran100% (1)
- Ergonomic DesignDocumento132 páginasErgonomic DesignErin WalkerAinda não há avaliações
- Digital Current Limiting Techniques For Switching Power Supplies PDFDocumento9 páginasDigital Current Limiting Techniques For Switching Power Supplies PDFAdolfo A HerreraAinda não há avaliações
- Flyback ConverterDocumento19 páginasFlyback Convertergpalencia_1Ainda não há avaliações
- DC Ripple Current Reduction On A Single-Phase PWM Voltage-Source RectifierDocumento11 páginasDC Ripple Current Reduction On A Single-Phase PWM Voltage-Source RectifierRajni YadavAinda não há avaliações
- A Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM StrategyDocumento2 páginasA Novel Soft-Switching Single-Phase AC-DC-AC Converter Using New ZVS-PWM Strategyskumar_61719Ainda não há avaliações
- Microchip CLC DescriptionDocumento12 páginasMicrochip CLC DescriptionKamlesh YadavAinda não há avaliações
- EI5007W2Documento17 páginasEI5007W2PyiAungAinda não há avaliações
- How To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - A High Power On-Board Charger DesignDocumento5 páginasHow To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - A High Power On-Board Charger DesignThien DinhAinda não há avaliações
- Ieee Current ModeDocumento7 páginasIeee Current ModepqqpAinda não há avaliações
- Paper Modulacion PWM With AN-42026Documento16 páginasPaper Modulacion PWM With AN-42026DuckTronixAinda não há avaliações
- Very Wide Input Voltage Range-Flyback (90V To 600V AC)Documento12 páginasVery Wide Input Voltage Range-Flyback (90V To 600V AC)senkum812002Ainda não há avaliações
- Internal and External Op-Amp Compensation - A Control-Centric TutorialDocumento15 páginasInternal and External Op-Amp Compensation - A Control-Centric TutorialengsysAinda não há avaliações
- Dual Current-Sense Amplifi Ers Simplify H-Bridge Load MonitoringDocumento2 páginasDual Current-Sense Amplifi Ers Simplify H-Bridge Load MonitoringJorge GuerreroAinda não há avaliações
- Wide Range Soft Switching PWM Three-Level DC-DC Converters Suitable For Industrial ApplicationsDocumento14 páginasWide Range Soft Switching PWM Three-Level DC-DC Converters Suitable For Industrial Applicationsstrngr06Ainda não há avaliações
- Resonant DC Link in PWM AC ChopperDocumento5 páginasResonant DC Link in PWM AC ChopperMukesh SharmaAinda não há avaliações
- v42 63Documento5 páginasv42 63Bala KumarAinda não há avaliações
- Novel Sngle Phase ZCSDocumento7 páginasNovel Sngle Phase ZCSAntonio Hadade NetoAinda não há avaliações
- Application of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemDocumento5 páginasApplication of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemRaghava KatreepalliAinda não há avaliações
- Simplified Short-Circuit CalculationsDocumento18 páginasSimplified Short-Circuit CalculationsWallie BillingsleyAinda não há avaliações
- Sliding Mode Control of SMPS: Ms. A. Jonisha, Mrs. V. Devi MaheswaranDocumento11 páginasSliding Mode Control of SMPS: Ms. A. Jonisha, Mrs. V. Devi MaheswaranInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- Improved DSP-controlled Online UPS System With High Real Output PowerDocumento7 páginasImproved DSP-controlled Online UPS System With High Real Output Powerajit_ghodkeAinda não há avaliações
- UPS SystemDocumento4 páginasUPS Systemमृत्युंजय झाAinda não há avaliações
- Compensation Method Peak Current Mode Control Buck AN028 enDocumento13 páginasCompensation Method Peak Current Mode Control Buck AN028 ensadqazwsxAinda não há avaliações
- ZVS Boost Converter With A Flyback Snubber CircuitDocumento8 páginasZVS Boost Converter With A Flyback Snubber Circuitmishranamit2211Ainda não há avaliações
- AC AC ConverterDocumento11 páginasAC AC ConverterBui DaiAinda não há avaliações
- Art3 - (S1), Florian Ion, 17-22Documento6 páginasArt3 - (S1), Florian Ion, 17-22camiloAinda não há avaliações
- New Techniques For Measuring Feedback Loop Transfer Functions in Current Mode ConvertersDocumento15 páginasNew Techniques For Measuring Feedback Loop Transfer Functions in Current Mode Convertersvikaspawar2012Ainda não há avaliações
- A High Efficiency Boost Converter For TFT-LCD Bias SupplyDocumento4 páginasA High Efficiency Boost Converter For TFT-LCD Bias SupplyHamid BoualiAinda não há avaliações
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocumento6 páginasCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalAinda não há avaliações
- Current Mode Voltage Mode ?: by Dr. Ray RidleyDocumento3 páginasCurrent Mode Voltage Mode ?: by Dr. Ray RidleyPhạm Văn TưởngAinda não há avaliações
- E 270 ContentDocumento18 páginasE 270 ContentRodel PelimianoAinda não há avaliações
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDocumento6 páginasImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupAinda não há avaliações
- How To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - Power Factor CorrectionDocumento2 páginasHow To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - Power Factor CorrectionThien DinhAinda não há avaliações
- DC-DC Converter Tutorial: Application Note 2031Documento10 páginasDC-DC Converter Tutorial: Application Note 2031Mou LaliAinda não há avaliações
- Sine Wave Inverter With PICDocumento50 páginasSine Wave Inverter With PICmtrapkAinda não há avaliações
- A Buck-or-Boost Converter Module With Embedded Inductor and Fast Current LimitDocumento10 páginasA Buck-or-Boost Converter Module With Embedded Inductor and Fast Current LimitVeeraiah BodduAinda não há avaliações
- INFORME N2elt2580 JHASDocumento18 páginasINFORME N2elt2580 JHASSantiago UsseglioAinda não há avaliações
- Family Controller PFCDocumento8 páginasFamily Controller PFCWesley de PaulaAinda não há avaliações
- High Efficiency DC-to-AC Power Inverter With Special DC InterfaceDocumento6 páginasHigh Efficiency DC-to-AC Power Inverter With Special DC InterfacestrahinjaAinda não há avaliações
- Techniques UPS: DigitalDocumento6 páginasTechniques UPS: DigitalFabian Rodriguez NietoAinda não há avaliações
- Adaptive Constant On-Time (D-CAP™) Control Study inNotebookApps - Slva281bDocumento9 páginasAdaptive Constant On-Time (D-CAP™) Control Study inNotebookApps - Slva281bMalli ArjunAinda não há avaliações
- Conv DC-DC Paper ENglishDocumento5 páginasConv DC-DC Paper ENglishpepe890305Ainda não há avaliações
- Single-Inductor Multiple-Output DC-DC ConvertersDocumento22 páginasSingle-Inductor Multiple-Output DC-DC Convertersvietanh_askAinda não há avaliações
- Devendra Singh Kushwaha: Topic-A Novel Approach To Designing of Low Power Operational AmplifierDocumento31 páginasDevendra Singh Kushwaha: Topic-A Novel Approach To Designing of Low Power Operational AmplifierHarish KumarAinda não há avaliações
- Power Systems-On-Chip: Practical Aspects of DesignNo EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardAinda não há avaliações
- Org Stu Nov 2020Documento4 páginasOrg Stu Nov 2020Arumugam RajendranAinda não há avaliações
- Tender No-01 Sayan SDN Tender NoticeDocumento2 páginasTender No-01 Sayan SDN Tender NoticeArumugam RajendranAinda não há avaliações
- Aaru - SCADA Operator Console PDFDocumento3 páginasAaru - SCADA Operator Console PDFArumugam RajendranAinda não há avaliações
- Aaru - SCADA Operator Console PDFDocumento3 páginasAaru - SCADA Operator Console PDFArumugam RajendranAinda não há avaliações
- Role of Pumped Storage Power PlantsDocumento5 páginasRole of Pumped Storage Power PlantsArumugam RajendranAinda não há avaliações
- 8 6 12 Horizontal Hydraulic Pole Assembly and Installation For Base Plate Mounted Utility PolesDocumento6 páginas8 6 12 Horizontal Hydraulic Pole Assembly and Installation For Base Plate Mounted Utility PolesArumugam RajendranAinda não há avaliações
- Circular (Resuming SS & Line Works)Documento2 páginasCircular (Resuming SS & Line Works)Arumugam RajendranAinda não há avaliações
- LAC English PDFDocumento30 páginasLAC English PDFArumugam RajendranAinda não há avaliações
- Automation and Electronics Technician Course enDocumento6 páginasAutomation and Electronics Technician Course enArumugam RajendranAinda não há avaliações
- Corono Virus (COVID 19) Instruction - CompressedDocumento21 páginasCorono Virus (COVID 19) Instruction - CompressedArumugam RajendranAinda não há avaliações
- Openscape Business: Openscape Business Provides A Uni-Form Solution ArchitectureDocumento12 páginasOpenscape Business: Openscape Business Provides A Uni-Form Solution ArchitectureArumugam RajendranAinda não há avaliações
- Engineering Application of Labeling System in Power Plant: Chunming Wei, Zichan Zhang, Xinghai Zhao Guoxu WangDocumento4 páginasEngineering Application of Labeling System in Power Plant: Chunming Wei, Zichan Zhang, Xinghai Zhao Guoxu WangArumugam RajendranAinda não há avaliações
- Fluid Flow A First Course in Fluid Mechanics: EngineeringDocumento1 páginaFluid Flow A First Course in Fluid Mechanics: EngineeringArumugam RajendranAinda não há avaliações
- 2020 ARP Planner 20 12 2019Documento2 páginas2020 ARP Planner 20 12 2019Sowkarthiga BaluAinda não há avaliações
- Fluid Power SystemsDocumento3 páginasFluid Power SystemsArumugam RajendranAinda não há avaliações
- AMR Indent To CE MMDocumento1 páginaAMR Indent To CE MMArumugam RajendranAinda não há avaliações
- Budget ManualDocumento84 páginasBudget ManualArumugam RajendranAinda não há avaliações
- Computing BasicDocumento55 páginasComputing BasicCandyAinda não há avaliações
- Arumugam-3e Zw0YZWRqY73YdxcUtZg PDFDocumento6 páginasArumugam-3e Zw0YZWRqY73YdxcUtZg PDFArumugam RajendranAinda não há avaliações
- Data Sheet For Insulating Mat: Premier Polyfilm LTDDocumento1 páginaData Sheet For Insulating Mat: Premier Polyfilm LTDArumugam RajendranAinda não há avaliações
- Specification EPABX - Rev.-A PDFDocumento3 páginasSpecification EPABX - Rev.-A PDFArumugam RajendranAinda não há avaliações
- Msme e CC 2018 19Documento50 páginasMsme e CC 2018 19Arumugam RajendranAinda não há avaliações
- Budget Estimates 2019-2020 PDFDocumento268 páginasBudget Estimates 2019-2020 PDFArumugam RajendranAinda não há avaliações
- Notification TANGEDCO Gangman Trainee PostsDocumento14 páginasNotification TANGEDCO Gangman Trainee PostsbulbtommyAinda não há avaliações
- Service Manual: Induction Plate HD4918Documento2 páginasService Manual: Induction Plate HD4918Arumugam Rajendran100% (2)
- Chief Engineer/ PersonnelDocumento1 páginaChief Engineer/ PersonnelArumugam RajendranAinda não há avaliações
- Service Manual: Induction Plate HD4918Documento2 páginasService Manual: Induction Plate HD4918Arumugam Rajendran100% (2)
- 1SFC132367M0201 PSE Internal Modbus RTUDocumento22 páginas1SFC132367M0201 PSE Internal Modbus RTUAhmed OsmanAinda não há avaliações
- A Simulation-Based Process Model For Managing Complex Design ProcessDocumento13 páginasA Simulation-Based Process Model For Managing Complex Design ProcessMetehan AgacaAinda não há avaliações
- Lab1: Access Control: Posix AclDocumento7 páginasLab1: Access Control: Posix AclAla JebnounAinda não há avaliações
- Number System Questions PDFDocumento20 páginasNumber System Questions PDFMynur RahmanAinda não há avaliações
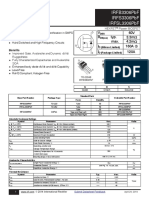
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocumento12 páginasIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligAinda não há avaliações
- Narayana Xii Pass Ir Iit (2023 24) PDFDocumento16 páginasNarayana Xii Pass Ir Iit (2023 24) PDFRaghav ChaudharyAinda não há avaliações
- Sympoly Toolbox IssuesDocumento7 páginasSympoly Toolbox IssuesAli FahemAinda não há avaliações
- Audio Evolution Mobile User Manual For AndroidDocumento336 páginasAudio Evolution Mobile User Manual For AndroidkbalazsAinda não há avaliações
- Data Structures and Other Objects Using C++, Third Edition, by Michael Main and Walter SavitchDocumento6 páginasData Structures and Other Objects Using C++, Third Edition, by Michael Main and Walter SavitchMd Rubaiyat BhuiyanAinda não há avaliações
- Unit Exam 5Documento3 páginasUnit Exam 5Rose AstoAinda não há avaliações
- F3 Chapter 1 (SOALAN) - RespirationDocumento2 páginasF3 Chapter 1 (SOALAN) - Respirationleong cheng liyAinda não há avaliações
- Chapter 3 Selections - WhiteBackgroundDocumento67 páginasChapter 3 Selections - WhiteBackgroundyowzaAinda não há avaliações
- Which Is The Best Solid Modelling - Dhyan AcademyDocumento3 páginasWhich Is The Best Solid Modelling - Dhyan Academydhyanacademy engineersAinda não há avaliações
- Como Desarmar Sony Vaio VGN-FE PDFDocumento14 páginasComo Desarmar Sony Vaio VGN-FE PDFPeruInalambrico Redes InalambricasAinda não há avaliações
- CSC:361-Software Engineering: Semester: Fall2020Documento39 páginasCSC:361-Software Engineering: Semester: Fall2020hamsfayyazAinda não há avaliações
- 003pcu3001 Baja California - JMH - v4 PDFDocumento15 páginas003pcu3001 Baja California - JMH - v4 PDFEmir RubliovAinda não há avaliações
- Chapter One PDFDocumento74 páginasChapter One PDFAdelu BelleteAinda não há avaliações
- T 096Documento3 páginasT 096abelAinda não há avaliações
- Gen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Documento13 páginasGen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Angeline TumananAinda não há avaliações
- Cheng-Yi Cheng - Yi: KBU 10A/15A/25A/35A SERIESDocumento2 páginasCheng-Yi Cheng - Yi: KBU 10A/15A/25A/35A SERIESThomas ThomasAinda não há avaliações
- From Assessment To Purchase - A Three-Stage ModelDocumento15 páginasFrom Assessment To Purchase - A Three-Stage ModelRONAL EMERSON NOA ORTEGAAinda não há avaliações
- Chap005 3Documento26 páginasChap005 3Anass BAinda não há avaliações
- Body Deassembly 9 Interior TrimDocumento7 páginasBody Deassembly 9 Interior TrimCarlos TecnicAinda não há avaliações
- ProjectDocumento6 páginasProjecthazimsyakir69Ainda não há avaliações
- Limitations of Learning by Discovery - Ausubel PDFDocumento14 páginasLimitations of Learning by Discovery - Ausubel PDFOpazo SebastianAinda não há avaliações
- CHM170L Exp3 Surface TensionDocumento5 páginasCHM170L Exp3 Surface TensionKaiser SaltoAinda não há avaliações
- Slip Rings: SRI085 V100 - XX - XX - Xxx1XxDocumento3 páginasSlip Rings: SRI085 V100 - XX - XX - Xxx1XxMatheus Henrique MattiaAinda não há avaliações