Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Pco Cooke KB Shading 0603 SDocumento8 páginasPco Cooke KB Shading 0603 Ssamik4uAinda não há avaliações
- 2170 FullDocumento12 páginas2170 Fullsamik4uAinda não há avaliações
- SdsdsDocumento36 páginasSdsdssamik4uAinda não há avaliações
- Rsta 1915 0001Documento26 páginasRsta 1915 0001samik4uAinda não há avaliações
- Cantilever 1977Documento16 páginasCantilever 1977samik4uAinda não há avaliações
- Axisymmetric Rim Instability of Water Droplet Impact On A Super-Hydrophobic SurfaceDocumento8 páginasAxisymmetric Rim Instability of Water Droplet Impact On A Super-Hydrophobic Surfacesamik4uAinda não há avaliações
- Omega MHS1Documento1 páginaOmega MHS1samik4uAinda não há avaliações
- Fluid Mechanics of Vascular Systems, Diseases, and ThrombosisDocumento33 páginasFluid Mechanics of Vascular Systems, Diseases, and Thrombosissamik4uAinda não há avaliações
- Anthony 1997Documento14 páginasAnthony 1997samik4uAinda não há avaliações
- Soft Matter: CommunicationDocumento6 páginasSoft Matter: Communicationsamik4uAinda não há avaliações
- Analytical Model For Predicting Maximum Spread of Droplet Impinging On Solid SurfacesDocumento8 páginasAnalytical Model For Predicting Maximum Spread of Droplet Impinging On Solid Surfacessamik4uAinda não há avaliações
- PhysRevLett 112 134501Documento5 páginasPhysRevLett 112 134501samik4uAinda não há avaliações
- PhysRevFluids 4 123605Documento9 páginasPhysRevFluids 4 123605samik4uAinda não há avaliações
- Tuesday, November 8, 2022 5:29 PM: Lectures Page 1Documento1 páginaTuesday, November 8, 2022 5:29 PM: Lectures Page 1samik4uAinda não há avaliações
- Quantization ErrorDocumento3 páginasQuantization Errorsamik4uAinda não há avaliações
- WO2018075145A1Documento49 páginasWO2018075145A1samik4uAinda não há avaliações
- Wootton2001 Article AMechanisticModelOfAcutePlatelDocumento9 páginasWootton2001 Article AMechanisticModelOfAcutePlatelsamik4uAinda não há avaliações
- NPTEL Mechanical Engineering - Introduction To TurbulenceDocumento2 páginasNPTEL Mechanical Engineering - Introduction To Turbulencesamik4uAinda não há avaliações
- AirfoilTapsv3 PDFDocumento1 páginaAirfoilTapsv3 PDFsamik4uAinda não há avaliações
- Wong2013 1Documento13 páginasWong2013 1samik4uAinda não há avaliações
- ARatioDocumento11 páginasARatiosamik4uAinda não há avaliações
- Lab 5: Turbine Engine Demonstration Experiment: Group Report Due On 04/11/18Documento1 páginaLab 5: Turbine Engine Demonstration Experiment: Group Report Due On 04/11/18samik4uAinda não há avaliações
- Critical Points in A Turbulent Near Wake: by Zhou R. A. AntoniaDocumento23 páginasCritical Points in A Turbulent Near Wake: by Zhou R. A. Antoniasamik4uAinda não há avaliações
- Contagious Fear: Escape Behavior Increases With Flock Size in European Gregarious BirdsDocumento9 páginasContagious Fear: Escape Behavior Increases With Flock Size in European Gregarious Birdssamik4uAinda não há avaliações
- Commentary Biomechanics of Bird Flight: Bret W. TobalskeDocumento12 páginasCommentary Biomechanics of Bird Flight: Bret W. Tobalskesamik4uAinda não há avaliações
- Onset NumberDocumento26 páginasOnset Numbersamik4uAinda não há avaliações
- Discrete-Vortex Method With Novel Shedding Criterion For Unsteady Aerofoil Flows With Intermittent Leading-Edge Vortex SheddingDocumento39 páginasDiscrete-Vortex Method With Novel Shedding Criterion For Unsteady Aerofoil Flows With Intermittent Leading-Edge Vortex Sheddingsamik4uAinda não há avaliações
- Absolute and Convective Instabilities of Two-Dimensional Bluff Body Wakes in Ground EffectDocumento13 páginasAbsolute and Convective Instabilities of Two-Dimensional Bluff Body Wakes in Ground Effectsamik4uAinda não há avaliações
- Journal of Fluids and Structures: C.M. Hoke, J. Young, J.C.S. LaiDocumento25 páginasJournal of Fluids and Structures: C.M. Hoke, J. Young, J.C.S. Laisamik4uAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Book of Abstracts FINALDocumento130 páginasBook of Abstracts FINALzooinfoAinda não há avaliações
- 2013 H2 Physics Tut18 Quantum Physics Part1 (Solutions)Documento14 páginas2013 H2 Physics Tut18 Quantum Physics Part1 (Solutions)Wee Chee LimAinda não há avaliações
- ZeemanDocumento4 páginasZeemanBhabeshSarangiAinda não há avaliações
- Atomic Physics Solved Examples - AskIITiansDocumento3 páginasAtomic Physics Solved Examples - AskIITiansthiripura sundariAinda não há avaliações
- Defraction of LightDocumento21 páginasDefraction of LightPrakhar94% (18)
- Guelph Physics 1070 Fall 2011 OutlineDocumento11 páginasGuelph Physics 1070 Fall 2011 OutlineJoe FindlayAinda não há avaliações
- Mortara ELI 150c, 250c ECG - User ManualDocumento80 páginasMortara ELI 150c, 250c ECG - User ManualabeklAinda não há avaliações
- ELE492 - Lecture 8 - 14-03-2023Documento130 páginasELE492 - Lecture 8 - 14-03-2023ozllmtknAinda não há avaliações
- Physics Review Test - Optics - Grade 10Documento11 páginasPhysics Review Test - Optics - Grade 10Arhant KarthikeyanAinda não há avaliações
- Mind Control PatentsDocumento41 páginasMind Control PatentsPeter T. Santilli100% (1)
- Ch-08 Electromagnetic Wave: Daily Practice Problem 02Documento2 páginasCh-08 Electromagnetic Wave: Daily Practice Problem 02Chandrima Dola MukherjeeAinda não há avaliações
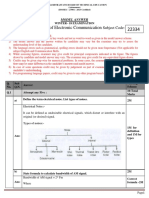
- 2018 Winter Model Answer PaperDocumento16 páginas2018 Winter Model Answer PaperEr Amarsinh RAinda não há avaliações
- What Is Dynamic Range in Photography - Exposure EssentialsDocumento6 páginasWhat Is Dynamic Range in Photography - Exposure EssentialsDragan StanisavljevicAinda não há avaliações
- Microscope-Distributor Price List V20220809 (2023)Documento17 páginasMicroscope-Distributor Price List V20220809 (2023)Maycol GarciaAinda não há avaliações
- Lambert's Cosine LawDocumento4 páginasLambert's Cosine LawfierywinAinda não há avaliações
- Modeling The Radiation Pattern of LEDsDocumento12 páginasModeling The Radiation Pattern of LEDsMichael PearsonAinda não há avaliações
- Chapter-1 About BELDocumento22 páginasChapter-1 About BELSHANKAR PRINTINGAinda não há avaliações
- Temporal Pulse Broadening Due To Dispersion and Weak Turbulence in FSO CommunicationDocumento6 páginasTemporal Pulse Broadening Due To Dispersion and Weak Turbulence in FSO CommunicationMohamed BouhaddaAinda não há avaliações
- How Night Vision WorksDocumento25 páginasHow Night Vision WorksLokesh TanwarAinda não há avaliações
- Using Diva For Assessing Climate-Based Leed Daylight Credit: July 2014Documento7 páginasUsing Diva For Assessing Climate-Based Leed Daylight Credit: July 2014Ritica BhasinAinda não há avaliações
- Effect of EM WavesDocumento6 páginasEffect of EM WavesNOVEY CONSTANTINOAinda não há avaliações
- Best Practise S For Super RamanDocumento13 páginasBest Practise S For Super RamanAnh Ba LâmAinda não há avaliações
- Fo-Nt 6Kw Reference Parts List: HS-98 SensorDocumento1 páginaFo-Nt 6Kw Reference Parts List: HS-98 SensorChris KelbaughAinda não há avaliações
- Spectrum and Energy Level ExerciseDocumento6 páginasSpectrum and Energy Level ExerciseJjrlAinda não há avaliações
- Theremino Spectrometer Construction ENGDocumento25 páginasTheremino Spectrometer Construction ENGSmoof FoomsAinda não há avaliações
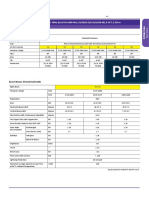
- Antenna Spec SheetDocumento4 páginasAntenna Spec SheetBrianAinda não há avaliações
- LKDocumento64 páginasLKargaAinda não há avaliações
- 4C plc8 Lens 14Documento3 páginas4C plc8 Lens 14Soji AdimulaAinda não há avaliações
- Non Visible ImagingDocumento1 páginaNon Visible Imagingsaireddy8810% (1)
- 06 VEX Spot CDocumento4 páginas06 VEX Spot CTemam AdemAinda não há avaliações