Você também pode gostar
- Voltage Mode ControllerDocumento84 páginasVoltage Mode ControllerPATEL SWAPNEELAinda não há avaliações
- Ba FireprojectDocumento5 páginasBa FireprojectPATEL SWAPNEELAinda não há avaliações
- 23D AdvanceDocumento8 páginas23D AdvancePATEL SWAPNEELAinda não há avaliações
- Real DharmaDocumento2 páginasReal DharmaPATEL SWAPNEELAinda não há avaliações
- PRACTICAL DP TransmitterDocumento5 páginasPRACTICAL DP TransmitterPATEL SWAPNEELAinda não há avaliações
- Pid5030 PDFDocumento22 páginasPid5030 PDFPATEL SWAPNEEL100% (1)
- Bhakti Shastri Student HandbookDocumento111 páginasBhakti Shastri Student Handbookabhaydeol100% (7)
- SI LAB User ManualDocumento18 páginasSI LAB User ManualPATEL SWAPNEELAinda não há avaliações
- Syllabi GATE2017 PDFDocumento73 páginasSyllabi GATE2017 PDFAnkit Kumar AJAinda não há avaliações
- Si Lab Buffer CardDocumento4 páginasSi Lab Buffer CardPATEL SWAPNEELAinda não há avaliações
- 8 0 5 1 C o R E: 100MIPS, 128K Flash, 12-Bit ADC, 100-Pin MCUDocumento2 páginas8 0 5 1 C o R E: 100MIPS, 128K Flash, 12-Bit ADC, 100-Pin MCUPATEL SWAPNEELAinda não há avaliações
- Quiz - L T PDFDocumento4 páginasQuiz - L T PDFPATEL SWAPNEELAinda não há avaliações
- C 8051 F 12 XDocumento314 páginasC 8051 F 12 XPATEL SWAPNEELAinda não há avaliações
- New IdcDocumento12 páginasNew IdcPATEL SWAPNEELAinda não há avaliações
- Career Choic SurveyDocumento1 páginaCareer Choic SurveyPATEL SWAPNEELAinda não há avaliações
- C8051F12x DKDocumento12 páginasC8051F12x DKPATEL SWAPNEELAinda não há avaliações
- Preaching Is The Essence PDFDocumento4 páginasPreaching Is The Essence PDFPATEL SWAPNEELAinda não há avaliações
- Digital Filters - Implementation and Design: Basic Filtering OperationsDocumento19 páginasDigital Filters - Implementation and Design: Basic Filtering OperationsPATEL SWAPNEELAinda não há avaliações
- Homeschooling PDFDocumento2 páginasHomeschooling PDFPATEL SWAPNEELAinda não há avaliações
- Deity Worship For ChildrenDocumento2 páginasDeity Worship For ChildrenvdaAinda não há avaliações
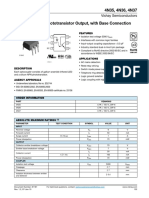
- Vishay Semiconductors: FeaturesDocumento7 páginasVishay Semiconductors: FeaturesbhathiyaengAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Child Centered CurriculumDocumento11 páginasChild Centered Curriculumira_sanyalAinda não há avaliações
- Hwy Beg Exit Test ADocumento3 páginasHwy Beg Exit Test AAdriana ChaconAinda não há avaliações
- Tutorial - Creating Forms PDFDocumento9 páginasTutorial - Creating Forms PDFBlashko GjorgjievAinda não há avaliações
- Ekphrasis and Its Multifaceted Nature: Ways of Its Usage in Literature and CinematographyDocumento12 páginasEkphrasis and Its Multifaceted Nature: Ways of Its Usage in Literature and CinematographyFernando GarciaAinda não há avaliações
- SNB KshudrarogaDocumento12 páginasSNB KshudrarogaImran Patel50% (2)
- 1-1 Review - Four Types of Sentences - SMRT EnglishDocumento8 páginas1-1 Review - Four Types of Sentences - SMRT EnglishAlejandra CruzAinda não há avaliações
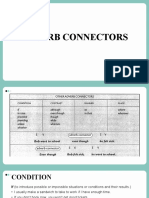
- Adverb ConnectorDocumento11 páginasAdverb ConnectorAges TiaraAinda não há avaliações
- SubnettingDocumento6 páginasSubnettingMadan Chaudhary100% (1)
- Wireless & Cellular Communication-18EC81: Prof - Priyanka L JCET Hubli ECEDocumento49 páginasWireless & Cellular Communication-18EC81: Prof - Priyanka L JCET Hubli ECEBasavaraj Raj100% (1)
- Computer Grade 2Documento3 páginasComputer Grade 2Lorna Herilla100% (1)
- Travel Agents From Delhi NCRDocumento847 páginasTravel Agents From Delhi NCRindusexposium33% (3)
- ETL Tools: Basic Details About InformaticaDocumento121 páginasETL Tools: Basic Details About InformaticaL JanardanaAinda não há avaliações
- January 2019 (IAL) QP - C34 EdexcelDocumento14 páginasJanuary 2019 (IAL) QP - C34 EdexcelВася МищенкоAinda não há avaliações
- Macbeth Thesis GuiltDocumento4 páginasMacbeth Thesis Guiltfc47b206100% (1)
- A Short Story of AkuDocumento6 páginasA Short Story of AkuJue Lei100% (1)
- Tomcat Performance TuningDocumento16 páginasTomcat Performance TuningFernandoMagalhãesAinda não há avaliações
- Knowledge of The Unseen (Khalis Itiqad)Documento3 páginasKnowledge of The Unseen (Khalis Itiqad)haqq92Ainda não há avaliações
- How Do We Make The Simple Present Tense?Documento24 páginasHow Do We Make The Simple Present Tense?Noelia Nancy PonceAinda não há avaliações
- Senior High School Student Permanent Record: Republic of The Philippines Department of EducationDocumento3 páginasSenior High School Student Permanent Record: Republic of The Philippines Department of EducationJennisRollenAranetaMaagadAinda não há avaliações
- 6475c919ebcbc 208Documento3 páginas6475c919ebcbc 208Saleem AbbasAinda não há avaliações
- Offensive Security Evasion Techniques Pt.1Documento42 páginasOffensive Security Evasion Techniques Pt.1Felipe RodriguesAinda não há avaliações
- Vedic MythologyDocumento4 páginasVedic MythologyDaniel MonteiroAinda não há avaliações
- ESL GmesDocumento10 páginasESL GmesSascha AegerterAinda não há avaliações
- The YAP Prolog SystemDocumento30 páginasThe YAP Prolog SystemTom WestAinda não há avaliações
- Assembly Language ProgrammingDocumento25 páginasAssembly Language ProgrammingAdithya R AnandAinda não há avaliações
- Worship: For The Leadership Podcast With Pastor Steve MurrellDocumento1 páginaWorship: For The Leadership Podcast With Pastor Steve MurrellRhegie SamonteAinda não há avaliações
- Akkordsymbole EDocumento15 páginasAkkordsymbole Ehope72Ainda não há avaliações
- Compiler Design DagDocumento7 páginasCompiler Design DagAman RajAinda não há avaliações
- Winitzki - No Distributional Limit For Delta Function of Complex ArgumentsDocumento2 páginasWinitzki - No Distributional Limit For Delta Function of Complex ArgumentswinitzkiAinda não há avaliações
- How To Paraphrase in The IELTS TestDocumento6 páginasHow To Paraphrase in The IELTS TestNgọc Quân TrươngAinda não há avaliações