Você também pode gostar
- United States Securities and Exchange Commission FORM 10-Q: Washington, D.C. 20549Documento40 páginasUnited States Securities and Exchange Commission FORM 10-Q: Washington, D.C. 20549Yalçın SabihaAinda não há avaliações
- 923514Documento13 páginas923514Yalçın SabihaAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Theiniversity of Illinois at Chicago: Department of Mechanical EngineeringDocumento47 páginasTheiniversity of Illinois at Chicago: Department of Mechanical EngineeringYalçın SabihaAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Design and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingDocumento16 páginasDesign and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingYalçın SabihaAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- At CommandsDocumento4 páginasAt CommandsAmra SpahićAinda não há avaliações
- 923514Documento13 páginas923514Yalçın SabihaAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- At CommandsDocumento4 páginasAt CommandsAmra SpahićAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
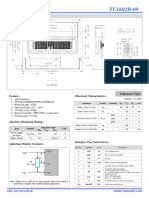
- TC1602B 08Documento1 páginaTC1602B 08Yalçın SabihaAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- 5741Documento72 páginas5741Yalçın SabihaAinda não há avaliações
- Functional Molecular Engineering Hierarchical Pore-Interface Based On TD-Kinetic Synergy Strategy For Efficient CO2 Capture and SeparationDocumento10 páginasFunctional Molecular Engineering Hierarchical Pore-Interface Based On TD-Kinetic Synergy Strategy For Efficient CO2 Capture and SeparationAnanthakishnanAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Advantages and Disadvantages of Social MediaDocumento2 páginasAdvantages and Disadvantages of Social MediaCeleste GalvanAinda não há avaliações
- Industrial Visit Report - 08 09 2018Documento11 páginasIndustrial Visit Report - 08 09 2018HARIKRISHNA MAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A 18-Page Statistics & Data Science Cheat SheetsDocumento18 páginasA 18-Page Statistics & Data Science Cheat SheetsAniket AggarwalAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- What Happens To Load at YieldingDocumento14 páginasWhat Happens To Load at YieldingWaqas Anjum100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Laptop Power SequenceDocumento16 páginasLaptop Power SequenceDelwar Hossain90% (10)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Stress Relief PrescriptionDocumento8 páginasThe Stress Relief PrescriptionRajesh KumarAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Duplichecker Plagiarism Report 3Documento3 páginasDuplichecker Plagiarism Report 3Mushfiqur RahmanAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- MECHANICAL ENGINEERING DEPARTMENT - Copy (Repaired)Documento10 páginasMECHANICAL ENGINEERING DEPARTMENT - Copy (Repaired)Wan Mohd AfnanAinda não há avaliações
- KTO12 Curriculum ExplainedDocumento24 páginasKTO12 Curriculum ExplainedErnesto ViilavertAinda não há avaliações
- ECU Designing and Testing Using NI ProductsDocumento6 páginasECU Designing and Testing Using NI ProductsOmar Eladel MahmoudAinda não há avaliações
- Customer Satisfaction: Measuring and Ensuring Customer LoyaltyDocumento16 páginasCustomer Satisfaction: Measuring and Ensuring Customer Loyaltyomermirza2009Ainda não há avaliações
- Introspective Hypnosis Class - 052017 - Antonio Sangio (2745)Documento62 páginasIntrospective Hypnosis Class - 052017 - Antonio Sangio (2745)sandra100% (4)
- RAN KPI MonitorDocumento8 páginasRAN KPI MonitorOmer WaqarAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- 5.2 Flanged Bolt CouplingDocumento11 páginas5.2 Flanged Bolt CouplingShayneBumatay0% (1)
- Numerical Simulations of Piano StringsDocumento7 páginasNumerical Simulations of Piano StringsMihai DincaAinda não há avaliações
- Positive Leadership and Adding Value - A Lifelong Journey: June 2017Documento7 páginasPositive Leadership and Adding Value - A Lifelong Journey: June 2017CescSalinasAinda não há avaliações
- Problem set 1 covers energy, heat, gases, and thermodynamicsDocumento15 páginasProblem set 1 covers energy, heat, gases, and thermodynamicsFikret BazAinda não há avaliações
- Baumann Forklift Dx50!14!40 S N 5361 Spare Parts CatalogueDocumento22 páginasBaumann Forklift Dx50!14!40 S N 5361 Spare Parts Catalogueanneclark120297mgz100% (108)
- Sae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarDocumento12 páginasSae Technical Paper Series 2015-36-0353: Static and Dynamic Analysis of A Chassis of A Prototype CarGanesh KCAinda não há avaliações
- ĐỀ CƯƠNG ÔN TẬP HỌC KÌ 1-LỚP 12Documento15 páginasĐỀ CƯƠNG ÔN TẬP HỌC KÌ 1-LỚP 12Anh Duc VuAinda não há avaliações
- Suggested For You: 15188 5 Years Ago 20:50Documento1 páginaSuggested For You: 15188 5 Years Ago 20:50DeevenAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- List of British StandardsDocumento6 páginasList of British StandardsPankajAinda não há avaliações
- Document E202 - 2008: Building Information Modeling Protocol ExhibitDocumento9 páginasDocument E202 - 2008: Building Information Modeling Protocol ExhibitAndres Cedeno TutivenAinda não há avaliações
- LD Lab ManualDocumento92 páginasLD Lab ManualSunil BegumpurAinda não há avaliações
- As 1463-1988 Polyethylene Pipe Extrusion CompoundsDocumento6 páginasAs 1463-1988 Polyethylene Pipe Extrusion CompoundsSAI Global - APACAinda não há avaliações
- Practical File Class XDocumento5 páginasPractical File Class XJaiAinda não há avaliações
- Middle Range TheoriesDocumento134 páginasMiddle Range TheoriesMary Joyce MejiaAinda não há avaliações
- New Membership Application GemsDocumento5 páginasNew Membership Application Gemslaguila18Ainda não há avaliações
- Air CasterDocumento25 páginasAir CasterPrabir Kumar Pati100% (1)