Você também pode gostar
- Active Harmonic Filtering Using Current-Controlled, Grid-Connected DG Units With Closed-Loop Power ControlDocumento12 páginasActive Harmonic Filtering Using Current-Controlled, Grid-Connected DG Units With Closed-Loop Power Controlfranchisca9999Ainda não há avaliações
- A Method For Power Conditioning With Harmonic Reduction in MicrogridsDocumento6 páginasA Method For Power Conditioning With Harmonic Reduction in MicrogridsINder DǝǝpAinda não há avaliações
- Technique For Voltage Control in Distribution SystemDocumento4 páginasTechnique For Voltage Control in Distribution Systema_mohid17Ainda não há avaliações
- Mitigation of Lower Order Harmonics in A Grid-Connected Single-Phase PV InverterDocumento14 páginasMitigation of Lower Order Harmonics in A Grid-Connected Single-Phase PV Invertersandeepbabu28Ainda não há avaliações
- A Review On Ripple Current Reduction Technique With Active Power FilterDocumento8 páginasA Review On Ripple Current Reduction Technique With Active Power FilterAneeq AshiqAinda não há avaliações
- Power Quality Improvement by Using Synchronous Virtual Grid Flux Oriented Control of Grid Side ConverterDocumento24 páginasPower Quality Improvement by Using Synchronous Virtual Grid Flux Oriented Control of Grid Side ConverterVasanth ReddyAinda não há avaliações
- A Benchmark System For Digital Time-Domain Simulation of An Active Power FilterDocumento8 páginasA Benchmark System For Digital Time-Domain Simulation of An Active Power FilterAndreeaAinda não há avaliações
- Energies: Voltage-Sensorless Control Scheme For A Grid Connected Inverter Using Disturbance ObserverDocumento19 páginasEnergies: Voltage-Sensorless Control Scheme For A Grid Connected Inverter Using Disturbance ObserverEngr ImmiAinda não há avaliações
- A Model Predictive Control Method For Grid-Connected Power Converter Without AC Voltage SensorsDocumento12 páginasA Model Predictive Control Method For Grid-Connected Power Converter Without AC Voltage SensorsnamngoclhuAinda não há avaliações
- Power Quality Improvement of Unified Power Quality Conditioner Using Reference Signal Generation MethodDocumento5 páginasPower Quality Improvement of Unified Power Quality Conditioner Using Reference Signal Generation MethodSurya Ch VenkataAinda não há avaliações
- Wideband Current Transducer For Measuring Ac Signals With Limited DC OffsetDocumento13 páginasWideband Current Transducer For Measuring Ac Signals With Limited DC OffsetCARROUCHO62Ainda não há avaliações
- 04115885Documento8 páginas04115885Huy HoangAinda não há avaliações
- 1 s2.0 S0142061523004568 MainDocumento10 páginas1 s2.0 S0142061523004568 MainMinh Tạ ĐứcAinda não há avaliações
- Voltage Controllable Power Factor CorrectorDocumento56 páginasVoltage Controllable Power Factor CorrectorMummadi Sai SandeepAinda não há avaliações
- Adaptive Voltage Control With Distributed Energy Resources: Algorithm, Theoretical Analysis, Simulation, and Field Test VerificationDocumento10 páginasAdaptive Voltage Control With Distributed Energy Resources: Algorithm, Theoretical Analysis, Simulation, and Field Test VerificationE.m. SoorajAinda não há avaliações
- DSTATCOM Control Algorithms: A Review: International Journal of Power Electronics and Drive System (IJPEDS)Documento12 páginasDSTATCOM Control Algorithms: A Review: International Journal of Power Electronics and Drive System (IJPEDS)AmmuRaAinda não há avaliações
- Grid Interconnection of Renewable Energy Sources at The Distribution Level With Power-Quality Improvement FeaturesDocumento10 páginasGrid Interconnection of Renewable Energy Sources at The Distribution Level With Power-Quality Improvement FeaturestheijesAinda não há avaliações
- Design of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemDocumento9 páginasDesign of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemAmberMeerabAinda não há avaliações
- Thu KaramDocumento11 páginasThu KaramSumit VermaAinda não há avaliações
- Reducing Source Current Harmonics Due To Balanced and Un-Balanced Voltage Variation With Fuzzy Controlled D-StatcomDocumento14 páginasReducing Source Current Harmonics Due To Balanced and Un-Balanced Voltage Variation With Fuzzy Controlled D-StatcomJames MorenoAinda não há avaliações
- Fault Current Contribution From Synchronous Machine and Inverter Based DGDocumento8 páginasFault Current Contribution From Synchronous Machine and Inverter Based DGabs1989Ainda não há avaliações
- Ijert Ijert: Fuzzy Controller Based Grid Connected Res at Distribution Level With Power Quality ImprovementDocumento7 páginasIjert Ijert: Fuzzy Controller Based Grid Connected Res at Distribution Level With Power Quality ImprovementBerhanu ZelalemAinda não há avaliações
- Universal Digital Controller For Boost CCM Power Factor Correction Stages Based On Current Rebuilding ConceptDocumento12 páginasUniversal Digital Controller For Boost CCM Power Factor Correction Stages Based On Current Rebuilding ConceptsindhukamitkarAinda não há avaliações
- A Novel Hybrid Control Method For Single-Phase-Input Variable Frequency Speed CoDocumento17 páginasA Novel Hybrid Control Method For Single-Phase-Input Variable Frequency Speed Cou2005044Ainda não há avaliações
- Anki A Unified Control Strategy For Three-Phase Inverter PDFDocumento16 páginasAnki A Unified Control Strategy For Three-Phase Inverter PDFRavi KumarAinda não há avaliações
- IgbtDocumento7 páginasIgbtelvergonzalez1Ainda não há avaliações
- 48 An Improved Maximum Power Point Tracking For PDFDocumento10 páginas48 An Improved Maximum Power Point Tracking For PDFSouhaib LoudaAinda não há avaliações
- 16248-Article Text PDF-92440-2-10-20210209Documento9 páginas16248-Article Text PDF-92440-2-10-20210209waael abdulhassanAinda não há avaliações
- ThesisDocumento76 páginasThesisSayantan Sinha100% (1)
- Elimination of Harmonics Using Active Power Filter Based On DQ Reference Frame TheoryDocumento5 páginasElimination of Harmonics Using Active Power Filter Based On DQ Reference Frame TheoryseventhsensegroupAinda não há avaliações
- Power Factor ThesisDocumento5 páginasPower Factor Thesisjessicatannershreveport100% (1)
- A 3-kW Unity-Power-Factor Rectifier Based PDFDocumento9 páginasA 3-kW Unity-Power-Factor Rectifier Based PDFRacielMCAinda não há avaliações
- Both Turkish Journal TemplateDocumento9 páginasBoth Turkish Journal TemplateSiva ForeviewAinda não há avaliações
- Parallel Operation of Ups 1Documento7 páginasParallel Operation of Ups 1ZIPDASHAinda não há avaliações
- Control of A Single-Stage Three-Phase Boost Power Factor Correction RectifierDocumento6 páginasControl of A Single-Stage Three-Phase Boost Power Factor Correction RectifierGoriparthi SambasievaraavAinda não há avaliações
- Sensorless Current Mode Control-An Observer-Based Technique For DC-DC ConvertersDocumento5 páginasSensorless Current Mode Control-An Observer-Based Technique For DC-DC ConvertersDipanjan DasAinda não há avaliações
- Utility Interface Issues For Line Connected PWM Voltage Source Converters: Comparative StudyDocumento8 páginasUtility Interface Issues For Line Connected PWM Voltage Source Converters: Comparative StudyLava KumarAinda não há avaliações
- Direct Power Control Strategies For Multilevel Inverter Based Custom Power DevicesDocumento9 páginasDirect Power Control Strategies For Multilevel Inverter Based Custom Power DevicestrrplacementAinda não há avaliações
- One-Cycle-Controlled Single-Phase Inverter For Grid Connected PV SystemDocumento8 páginasOne-Cycle-Controlled Single-Phase Inverter For Grid Connected PV SystemVIJAYPUTRAAinda não há avaliações
- Fuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Documento6 páginasFuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Dhammunodu MlaAinda não há avaliações
- Controllable Network Transformers: Deepak Divan and Jyoti SastryDocumento6 páginasControllable Network Transformers: Deepak Divan and Jyoti SastryimdadamuAinda não há avaliações
- Reduction of Current Harmonic Distortion in Three-Phase Grid-Connected Photovoltaic Inverters Via Resonant Current ControlDocumento9 páginasReduction of Current Harmonic Distortion in Three-Phase Grid-Connected Photovoltaic Inverters Via Resonant Current ControlRam KumarAinda não há avaliações
- A Hybrid Control Scheme ForDocumento12 páginasA Hybrid Control Scheme Forgerson gomesAinda não há avaliações
- Energies 14 02208 v3Documento17 páginasEnergies 14 02208 v3Bouchaib EssoussiAinda não há avaliações
- Block Diagram Base Paper PDFDocumento10 páginasBlock Diagram Base Paper PDFsony tejaswiAinda não há avaliações
- A Spectral Correlative Approach To Power Quality Improvement in Upfc AppliDocumento6 páginasA Spectral Correlative Approach To Power Quality Improvement in Upfc AppliIJERDAinda não há avaliações
- Ieee Transactions On Smart Grid, Vol. 8, No. 2, March 2017Documento6 páginasIeee Transactions On Smart Grid, Vol. 8, No. 2, March 2017yugeswarAinda não há avaliações
- Boost Power Factor CorectionDocumento6 páginasBoost Power Factor CorectionVlad LazărAinda não há avaliações
- Ijaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)Documento8 páginasIjaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)IAEME PublicationAinda não há avaliações
- Transient Response of The PI & Fuzzy Logic Controller Based DSTATCOMDocumento10 páginasTransient Response of The PI & Fuzzy Logic Controller Based DSTATCOMKarthik Karthu GowdaAinda não há avaliações
- An Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageDocumento10 páginasAn Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageChristian EmenikeAinda não há avaliações
- Icbdm 29 PDFDocumento6 páginasIcbdm 29 PDFPudhur Kannan ManiAinda não há avaliações
- 948-955 IJER - 2016 - 1201 Mona CDocumento7 páginas948-955 IJER - 2016 - 1201 Mona CInnovative Research PublicationsAinda não há avaliações
- Sandeep 2014Documento6 páginasSandeep 2014Gourab SahaAinda não há avaliações
- EPSR Classification LiriasDocumento26 páginasEPSR Classification Liriasrevi91398Ainda não há avaliações
- Thesis Power Factor CorrectionDocumento5 páginasThesis Power Factor CorrectionYolanda Ivey100% (2)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsNo EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsNota: 3.5 de 5 estrelas3.5/5 (3)
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesAinda não há avaliações
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringAinda não há avaliações
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesAinda não há avaliações
- Journal of Loss Prevention in The Process Industries: Min-Soo Kim, Sang-Kwon LeeDocumento5 páginasJournal of Loss Prevention in The Process Industries: Min-Soo Kim, Sang-Kwon LeeSrinivas GowdaAinda não há avaliações
- Analisa Harga: Pekerjaan: ElektrikalDocumento2 páginasAnalisa Harga: Pekerjaan: ElektrikalMuhammad AndreAinda não há avaliações
- HP Catalog 1992Documento732 páginasHP Catalog 1992moocomAinda não há avaliações
- The BeiDou Navigation Satellite System (BDS)Documento16 páginasThe BeiDou Navigation Satellite System (BDS)Shabbir AhmadAinda não há avaliações
- Practical Excercises For Learning To Construct NMRMRI Probe CircuitsDocumento13 páginasPractical Excercises For Learning To Construct NMRMRI Probe CircuitsParkguenheeAinda não há avaliações
- Uaf 42Documento13 páginasUaf 42Rinson Jawer Rivera GonzalezAinda não há avaliações
- LAB Experiement 2Documento5 páginasLAB Experiement 2lillyAinda não há avaliações
- Assign Hysteresis Parameter For Ericsson BTS PowerDocumento7 páginasAssign Hysteresis Parameter For Ericsson BTS Powermola argawAinda não há avaliações
- Compliance Evaluation of BTS ICNIRP Guidelines.: As PerDocumento27 páginasCompliance Evaluation of BTS ICNIRP Guidelines.: As Persyrish2622Ainda não há avaliações
- Applsci 08 01689 v3Documento46 páginasApplsci 08 01689 v3Éric MeiraAinda não há avaliações
- Serial Interface RS-449Documento17 páginasSerial Interface RS-449Loryliza M DeiparineAinda não há avaliações
- Satellite SubstationDocumento37 páginasSatellite SubstationjagadishAinda não há avaliações
- Db224, 6 or 9 DBD Gain: Exposed Dipole Quasi-Omni AntennaDocumento1 páginaDb224, 6 or 9 DBD Gain: Exposed Dipole Quasi-Omni AntennaThanh Kieu TienAinda não há avaliações
- LTE KPI Test Procedure (STC) v01 LABTestDocumento13 páginasLTE KPI Test Procedure (STC) v01 LABTestnitin_vf100% (1)
- 3G TechnologyDocumento13 páginas3G TechnologyRaj KumarAinda não há avaliações
- Handoff in Cellular Systems: Submitted By: Sireesha Vempati. Venkata Uppuluri. Vijaya PetlaDocumento6 páginasHandoff in Cellular Systems: Submitted By: Sireesha Vempati. Venkata Uppuluri. Vijaya Petlaanc62Ainda não há avaliações
- 2CPX208R V1Documento3 páginas2CPX208R V1Bhupendra JhaAinda não há avaliações
- 1900Mhz Digital Band Selective Repeater: Mbda-1933Documento2 páginas1900Mhz Digital Band Selective Repeater: Mbda-1933thunderAinda não há avaliações
- MIPSheet3 - 1solution2Documento6 páginasMIPSheet3 - 1solution2Sara UsamaAinda não há avaliações
- ADU4521R3v06-3762 DatasheetDocumento3 páginasADU4521R3v06-3762 DatasheetSandra Patricia Montero OrtaAinda não há avaliações
- 2.7. LBB - 1990Documento3 páginas2.7. LBB - 1990design mepAinda não há avaliações
- Electrical Machine Drives LabDocumento8 páginasElectrical Machine Drives Labblessedgeraldie78Ainda não há avaliações
- Microwave Filters For Communication Systems - 2018 - Cameron - Impedance and Admittance InvertersDocumento10 páginasMicrowave Filters For Communication Systems - 2018 - Cameron - Impedance and Admittance InvertersTanko SuleAinda não há avaliações
- Yamaha mg82cx mg102c SM PDFDocumento92 páginasYamaha mg82cx mg102c SM PDFManuel100% (1)
- Eq ChecklistDocumento4 páginasEq ChecklistAlex Popescu100% (1)
- IQ Theory of SignalDocumento3 páginasIQ Theory of SignalMuhammad RizkiAinda não há avaliações
- Light Fidelity Based Indoor Car ParkingDocumento4 páginasLight Fidelity Based Indoor Car ParkingIJARTETAinda não há avaliações
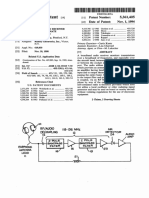
- United States Patent (19) : Q K Rf/Audio 8-36 MHZ AmDocumento5 páginasUnited States Patent (19) : Q K Rf/Audio 8-36 MHZ Amjohn ramseyAinda não há avaliações
- User Manual: RCW-2000 SpecificationsDocumento10 páginasUser Manual: RCW-2000 SpecificationsJahn MarcosAinda não há avaliações
- Curso ETL 600 EnelvenDocumento129 páginasCurso ETL 600 EnelvenfrbuenoAinda não há avaliações