Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Holidays List DpsDocumento2 páginasHolidays List DpsorionAinda não há avaliações
- MEE2004 Mechanics-Of-Machines ETH 1.1 AC40Documento3 páginasMEE2004 Mechanics-Of-Machines ETH 1.1 AC40orionAinda não há avaliações
- SexualharassmentDocumento1 páginaSexualharassmentorionAinda não há avaliações
- Science Class X Chapter 1 Chemical Reactions and EquationsDocumento6 páginasScience Class X Chapter 1 Chemical Reactions and EquationsorionAinda não há avaliações
- Chemical Reaction and EquationDocumento6 páginasChemical Reaction and EquationorionAinda não há avaliações
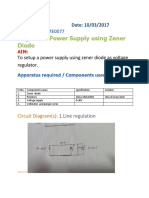
- Regulated Power Supply Using Zener Diode: Ex. No. 5 Reg. No.: 16BME0077Documento5 páginasRegulated Power Supply Using Zener Diode: Ex. No. 5 Reg. No.: 16BME0077orionAinda não há avaliações
- Circular On Changes in Attendance RulesDocumento21 páginasCircular On Changes in Attendance RulesorionAinda não há avaliações
- Somnath MahalayDocumento409 páginasSomnath MahalayorionAinda não há avaliações
- The Great Iron: PillarDocumento14 páginasThe Great Iron: PillarorionAinda não há avaliações
- World's First Water Treatment Techniques Using Apple and Tomato Peels - ScienceDailyDocumento4 páginasWorld's First Water Treatment Techniques Using Apple and Tomato Peels - ScienceDailyorionAinda não há avaliações
- Mr. Chandramauli Dwivedi: The Great Inventor of 2017Documento1 páginaMr. Chandramauli Dwivedi: The Great Inventor of 2017orionAinda não há avaliações
- Short Note On Given GraphDocumento2 páginasShort Note On Given GraphorionAinda não há avaliações
- Chandramauli Dwivedi 16bme0077 MIND MapsDocumento2 páginasChandramauli Dwivedi 16bme0077 MIND MapsorionAinda não há avaliações
- Hind PharmaDocumento5 páginasHind PharmaorionAinda não há avaliações
- Assignmen 6. Chandramauli Dwivedi 16bme0077Documento1 páginaAssignmen 6. Chandramauli Dwivedi 16bme0077orionAinda não há avaliações
- Chandramauli Dwivedi16BME0077 Mind Map For Remembering ContentDocumento1 páginaChandramauli Dwivedi16BME0077 Mind Map For Remembering ContentorionAinda não há avaliações
- 1 - Mesh Current AnalysisDocumento2 páginas1 - Mesh Current AnalysisorionAinda não há avaliações
- Assignment 1Documento19 páginasAssignment 1orionAinda não há avaliações
- Drill Bit: Thursday, January 19, 2017 11:20 AMDocumento1 páginaDrill Bit: Thursday, January 19, 2017 11:20 AMorionAinda não há avaliações
- FM Experiment 9Documento4 páginasFM Experiment 9orionAinda não há avaliações
- Winsem2016-17 Mee1004 Eth 4844 Rm004 Unit Iib-Buoyancy & FloatationDocumento9 páginasWinsem2016-17 Mee1004 Eth 4844 Rm004 Unit Iib-Buoyancy & FloatationorionAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Problem Set 1 PDFDocumento3 páginasProblem Set 1 PDFMrinal TripathiAinda não há avaliações
- Eaton Low Voltage MCC Design Guide Dg043001en 1Documento50 páginasEaton Low Voltage MCC Design Guide Dg043001en 1diegoAinda não há avaliações
- The Great Eggscape: Corey Kelvin Group 73 Nizam Umayr PatriciaDocumento7 páginasThe Great Eggscape: Corey Kelvin Group 73 Nizam Umayr PatriciaLegendaryNAinda não há avaliações
- Jacketing Techniques For Retrofitting of RC Column and BeamDocumento28 páginasJacketing Techniques For Retrofitting of RC Column and BeamJai Keerthi100% (4)
- Process-Flow Analysis: Mcgraw-Hill/IrwinDocumento26 páginasProcess-Flow Analysis: Mcgraw-Hill/IrwinVanessa Aulia PutriAinda não há avaliações
- Manufacturing of Milk PowderDocumento4 páginasManufacturing of Milk PowderShikha SinghAinda não há avaliações
- RETS Developer Start GuideDocumento10 páginasRETS Developer Start GuideKlemAinda não há avaliações
- ANITS College ProfileDocumento5 páginasANITS College ProfilemurthygvrAinda não há avaliações
- Property Manager Lease Approval Workflow SetupDocumento18 páginasProperty Manager Lease Approval Workflow SetupMuntazir Qamar100% (2)
- Content - EJ 2014 Galvanised GratesDocumento32 páginasContent - EJ 2014 Galvanised GratesFilip StojkovskiAinda não há avaliações
- Crafting and Executing Strategy The Quest For Competitive Advantage Concepts 21st Edition Thompson Test BankDocumento26 páginasCrafting and Executing Strategy The Quest For Competitive Advantage Concepts 21st Edition Thompson Test BankWilliamDavisbzotg100% (51)
- Motor Vehicle Traffic Fatalities & Fatality Rate: 1899 - 2003Documento2 páginasMotor Vehicle Traffic Fatalities & Fatality Rate: 1899 - 2003Yoni ReinónAinda não há avaliações
- Iec 60287-3-1-2017Documento54 páginasIec 60287-3-1-2017markos carrasco100% (2)
- Experiment No - 5: Objectives: Components RequiredDocumento16 páginasExperiment No - 5: Objectives: Components RequiredDeepak SaiAinda não há avaliações
- IPTV CodesDocumento27 páginasIPTV CodesAbdul Aziz0% (1)
- SK100XHW-E24 AbmessungenDocumento1 páginaSK100XHW-E24 AbmessungenKavabaAinda não há avaliações
- Shop Manual PC78MR-6-SEBM030601 PDFDocumento592 páginasShop Manual PC78MR-6-SEBM030601 PDFBudi Waskito95% (20)
- TIA Workshop ITBDocumento48 páginasTIA Workshop ITBFirman Suhendra100% (1)
- Lab Report - Copy EditedDocumento24 páginasLab Report - Copy EditedSaksham ShekhawatAinda não há avaliações
- 2071 1062 Installation and Use of Gas Detection Equipment Rev5.9 PDFDocumento30 páginas2071 1062 Installation and Use of Gas Detection Equipment Rev5.9 PDFSurendar VeerarajAinda não há avaliações
- Clel083e138 MVSWG Exe WDG 601Documento40 páginasClel083e138 MVSWG Exe WDG 601arielaparicioAinda não há avaliações
- jEDI Programmers GuideDocumento78 páginasjEDI Programmers Guidewhisky8750% (2)
- Technical Data: 1. DescriptionDocumento6 páginasTechnical Data: 1. DescriptionAnthonyAinda não há avaliações
- Philips dvp3000 3005 3007 3010 3500Documento36 páginasPhilips dvp3000 3005 3007 3010 3500Dobrica IlicAinda não há avaliações
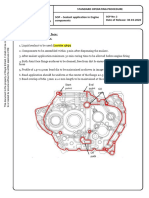
- SOP 2 - SOP For Sealant Application-1Documento3 páginasSOP 2 - SOP For Sealant Application-1ꯗꯤꯛꯕꯤꯖꯣꯏ ꯂꯨꯋꯥꯡ ꯁꯣꯔꯥꯝAinda não há avaliações
- Cisco LetterDocumento1 páginaCisco LetterAlexandru DrăganAinda não há avaliações
- Bank Branches JehanabadDocumento3 páginasBank Branches JehanabadRatnakar PatilAinda não há avaliações
- Who We Are: Together To Make A DifferenceDocumento4 páginasWho We Are: Together To Make A Differencelala6565Ainda não há avaliações
- Hydraulic Turbines and PumpsDocumento15 páginasHydraulic Turbines and PumpsSachin Chaturvedi100% (1)
- Injector DC CalculatorDocumento14 páginasInjector DC CalculatorFirdaus AbdullahAinda não há avaliações