Você também pode gostar
- Siemens Simoreg KDocumento12 páginasSiemens Simoreg Knafeesdelta175% (4)
- IoT Based Circuit Breaker ARDUINO BasedDocumento18 páginasIoT Based Circuit Breaker ARDUINO BasedShubnaya MS100% (2)
- Analog Circuit Design Volume Three: Design Note CollectionNo EverandAnalog Circuit Design Volume Three: Design Note CollectionNota: 3 de 5 estrelas3/5 (2)
- Manual Welch Allyn 62000Documento186 páginasManual Welch Allyn 62000mczerpa76010% (1)
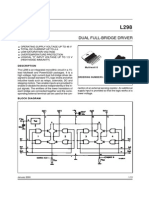
- L298 Dual Full-Bridge Driver IC for Motors and RelaysDocumento12 páginasL298 Dual Full-Bridge Driver IC for Motors and RelaysBastian RamadhanAinda não há avaliações
- Motor Controller Data SheetDocumento13 páginasMotor Controller Data Sheetapi-284769767Ainda não há avaliações
- Datasheet l298Documento27 páginasDatasheet l298TikaaDantSAinda não há avaliações
- Datasheet l298bDocumento14 páginasDatasheet l298bgioganAinda não há avaliações
- Dual Full-Bridge Driver: DescriptionDocumento13 páginasDual Full-Bridge Driver: DescriptionBaher Bassem MorkosAinda não há avaliações
- Two-Phase Stepper Motor Driver: DescriptionDocumento19 páginasTwo-Phase Stepper Motor Driver: DescriptionDan EsentherAinda não há avaliações
- LMD18201 3A, 55V H-Bridge: General DescriptionDocumento8 páginasLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoAinda não há avaliações
- 19 Current ControlDocumento5 páginas19 Current ControlZeshan LatifAinda não há avaliações
- UC3842 current mode controller application noteDocumento7 páginasUC3842 current mode controller application noteCui BapAinda não há avaliações
- Voltage Comperator3 LM397Documento10 páginasVoltage Comperator3 LM397ΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣAinda não há avaliações
- UC2842 Philips AN1272 PDFDocumento7 páginasUC2842 Philips AN1272 PDFupali01Ainda não há avaliações
- LM397MF Comparador 6 Pines PDFDocumento8 páginasLM397MF Comparador 6 Pines PDFAndres AlegriaAinda não há avaliações
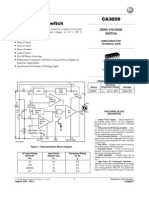
- CA3059Documento9 páginasCA3059chinametalAinda não há avaliações
- Principles Applications ICL7660Documento10 páginasPrinciples Applications ICL7660Juan F. RamosAinda não há avaliações
- Semiconductor Technical Data Zero Voltage SwitchDocumento6 páginasSemiconductor Technical Data Zero Voltage SwitchMuresan SanduAinda não há avaliações
- ME 455/555 - Lab 2 - 555 TimersDocumento10 páginasME 455/555 - Lab 2 - 555 TimersGustavo KernAinda não há avaliações
- Transition-Mode PFC Controller: 1 FeaturesDocumento17 páginasTransition-Mode PFC Controller: 1 Featuresadriancho66Ainda não há avaliações
- Data Sheet: TDA8380ADocumento21 páginasData Sheet: TDA8380Ajvazquez501Ainda não há avaliações
- Low Cost Current Feedback Phase Control Circuit: DescriptionDocumento11 páginasLow Cost Current Feedback Phase Control Circuit: Descriptiongruja57Ainda não há avaliações
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDocumento14 páginasLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiAinda não há avaliações
- Mach Cong Suat Cau H - Lmd18200Documento14 páginasMach Cong Suat Cau H - Lmd18200hieuhuech1Ainda não há avaliações
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocumento26 páginasVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksAinda não há avaliações
- LM311Documento23 páginasLM311Brzata PticaAinda não há avaliações
- Electronics Lab ManualDocumento92 páginasElectronics Lab ManualVolodya SmolyakAinda não há avaliações
- Blazer 400-800 Service ManualDocumento34 páginasBlazer 400-800 Service ManualdaossaAinda não há avaliações
- Ic Applications Lab NewDocumento12 páginasIc Applications Lab NewSandy RonaldoAinda não há avaliações
- LTC1073fa DatasheetDocumento16 páginasLTC1073fa DatasheetKushal KshirsagarAinda não há avaliações
- Application Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BDocumento22 páginasApplication Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BRicardo VieiraAinda não há avaliações
- 2.5A Power Switching Regulator: DescriptionDocumento16 páginas2.5A Power Switching Regulator: Descriptionbikram9830Ainda não há avaliações
- LB1845 DDocumento9 páginasLB1845 DFernando LizarragaAinda não há avaliações
- 555 Timer Waveform Generator Circuit GuideDocumento40 páginas555 Timer Waveform Generator Circuit GuidesaravananAinda não há avaliações
- Open Loop Phase Control Circuit: DescriptionDocumento7 páginasOpen Loop Phase Control Circuit: DescriptionMuhammad NajibAinda não há avaliações
- Simple automatic-shutoff circuit uses few componentsDocumento5 páginasSimple automatic-shutoff circuit uses few componentsJuan Manuel Han MacAinda não há avaliações
- High Efficiency 2A Step Down ConverterDocumento9 páginasHigh Efficiency 2A Step Down Converterbob75Ainda não há avaliações
- Adjustable Voltage and Current Regulator: DescriptionDocumento12 páginasAdjustable Voltage and Current Regulator: DescriptionAnghelescu CristinaAinda não há avaliações
- LM392Documento6 páginasLM392Brzata PticaAinda não há avaliações
- Mini Project DocumentationDocumento34 páginasMini Project DocumentationSri Krishna RakeshAinda não há avaliações
- Smart Voltage Stabilizer Using PIC16F877ADocumento8 páginasSmart Voltage Stabilizer Using PIC16F877AAswathy CjAinda não há avaliações
- 1.5A Power Switching Regulator: DescriptionDocumento16 páginas1.5A Power Switching Regulator: DescriptionPravin MevadaAinda não há avaliações
- Lica ManualDocumento99 páginasLica Manualspeak2dasAinda não há avaliações
- Experiment No: DateDocumento24 páginasExperiment No: DateChaitanya ShahAinda não há avaliações
- Toshiba Bipolar IC Drives DC MotorsDocumento14 páginasToshiba Bipolar IC Drives DC MotorsrikyAinda não há avaliações
- Stepper Motor Controllers: DescriptionDocumento12 páginasStepper Motor Controllers: DescriptionGigi TyireanAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsNo EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsNota: 3 de 5 estrelas3/5 (2)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1No EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Nota: 4.5 de 5 estrelas4.5/5 (3)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsAinda não há avaliações
- Congratulations & Farewell Messages for GraduatesDocumento3 páginasCongratulations & Farewell Messages for Graduatesbaymax love spideyAinda não há avaliações
- L298 Dual H-Bridge Motor Driver User's Guide and SchematicDocumento11 páginasL298 Dual H-Bridge Motor Driver User's Guide and Schematicbaymax love spideyAinda não há avaliações
- Panel Lantai 1Documento1 páginaPanel Lantai 1baymax love spideyAinda não há avaliações
- Perbedaan Hill Climbing Dan P&ODocumento13 páginasPerbedaan Hill Climbing Dan P&Obaymax love spideyAinda não há avaliações
- Silicon Photo DiodeDocumento5 páginasSilicon Photo DiodeAtanasius Agung NovianAinda não há avaliações
- Ir 2104Documento14 páginasIr 2104Néstor BernalAinda não há avaliações
- Datasheet Module Mma7361 PDFDocumento4 páginasDatasheet Module Mma7361 PDFbaymax love spideyAinda não há avaliações
- Data Sheet PD Bpw21, OsramDocumento8 páginasData Sheet PD Bpw21, Osrambaymax love spideyAinda não há avaliações
- DS3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description Benefits and FeaturesDocumento20 páginasDS3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description Benefits and FeaturesnovitaanggraheniAinda não há avaliações
- Oled TV: Service ManualDocumento62 páginasOled TV: Service Manualcarlos padilhaAinda não há avaliações
- Review: What Are The Values of The Following Resistors?Documento19 páginasReview: What Are The Values of The Following Resistors?Ahmed Abdelaziz AtallahAinda não há avaliações
- 100 000 10 CONTROLLINO MINI PinoutDocumento1 página100 000 10 CONTROLLINO MINI PinoutDISEÑO ALFAAinda não há avaliações
- TTF 103 ResistorDocumento5 páginasTTF 103 Resistorjackanddiane1Ainda não há avaliações
- Bite 3: Instruction ManualDocumento44 páginasBite 3: Instruction ManualAndré Luiz Fraga de OliveiraAinda não há avaliações
- (TOSHIBA 14VL36C Service Manual) .Documento29 páginas(TOSHIBA 14VL36C Service Manual) .rattman1Ainda não há avaliações
- Altistart 48 ManualDocumento84 páginasAltistart 48 ManualSohaib Khalid100% (1)
- A LOW COST RESISITIVITY METER FROM CHINAshorterDocumento3 páginasA LOW COST RESISITIVITY METER FROM CHINAshorterCharles Young100% (1)
- Daewoo dtd-14d3, d4, d6, d7, U6,20d3,21d3 Chassis cm-905s, cm-905sf SMDocumento56 páginasDaewoo dtd-14d3, d4, d6, d7, U6,20d3,21d3 Chassis cm-905s, cm-905sf SMnartea_narcisAinda não há avaliações
- Data Sheet Series MMP MMQ 02 PDFDocumento3 páginasData Sheet Series MMP MMQ 02 PDFgccontraAinda não há avaliações
- Service Manual: Mini Hi-Fi Component SystemDocumento86 páginasService Manual: Mini Hi-Fi Component SystemClaudio FernandesAinda não há avaliações
- Top 20 Electronic Component Manufacturers in IndiaDocumento18 páginasTop 20 Electronic Component Manufacturers in IndiafinvistaAinda não há avaliações
- Product Guide Solahd SDN C Compact Din Rail Series Power Supplies en Us 163906Documento8 páginasProduct Guide Solahd SDN C Compact Din Rail Series Power Supplies en Us 163906Anonymous xuEZu5KyAinda não há avaliações
- Contrast Music Production Center ManualDocumento54 páginasContrast Music Production Center ManualFrancisco Rodriguez MartinezAinda não há avaliações
- Module 3 (Series, Parallel and Series-Parallel Circuit)Documento11 páginasModule 3 (Series, Parallel and Series-Parallel Circuit)Xavier Vincent VisayaAinda não há avaliações
- 614 CodeDocumento20 páginas614 CodeAdamAinda não há avaliações
- NT538 Instruction ManualDocumento15 páginasNT538 Instruction ManualHubert Maraza JaliriAinda não há avaliações
- DATA CONVERTER AND CONTROL SYSTEM LAB MANUAL EXPERIMENTSDocumento45 páginasDATA CONVERTER AND CONTROL SYSTEM LAB MANUAL EXPERIMENTSSavita Kiran BAinda não há avaliações
- Home Made Circuit LayoutDocumento39 páginasHome Made Circuit LayoutKuyaMemayKyutAinda não há avaliações
- Resistor Color CodingDocumento2 páginasResistor Color CodingJT GeronaAinda não há avaliações
- STD 10TH Science Question BankDocumento4 páginasSTD 10TH Science Question Banktasneemgheewala6Ainda não há avaliações
- Yang-Circuit Systems With MATLAB and PSpice-2007Documento538 páginasYang-Circuit Systems With MATLAB and PSpice-2007nelsonAinda não há avaliações
- Build a Simple Light Sensing Circuit Using an LDRDocumento5 páginasBuild a Simple Light Sensing Circuit Using an LDRPiyush PatelAinda não há avaliações
- LC 90le760xDocumento77 páginasLC 90le760xبوند بوندAinda não há avaliações
- 5980 Brochure Printed Electronics Inks and CoatingsDocumento24 páginas5980 Brochure Printed Electronics Inks and CoatingsPRATIKPATELAinda não há avaliações
- Circuit SymbolsDocumento6 páginasCircuit SymbolsFarhan SaadatAinda não há avaliações
- Floating ResistorDocumento6 páginasFloating Resistorrahul shiv shankarAinda não há avaliações
- Installation Instructions Models Htri-S / Htri-D / Htri-R: Addressable Switch Interface ModulesDocumento4 páginasInstallation Instructions Models Htri-S / Htri-D / Htri-R: Addressable Switch Interface ModulesEng M ElseaidyAinda não há avaliações