Você também pode gostar
- Control Isócrono vs ReguladoDocumento5 páginasControl Isócrono vs ReguladoMijail David Felix Narvaez100% (1)
- ZT18-90 Aif048 124Documento50 páginasZT18-90 Aif048 124Mijail David Felix NarvaezAinda não há avaliações
- Curso Basico Conocimientos Hardware PDFDocumento57 páginasCurso Basico Conocimientos Hardware PDFMijail David Felix NarvaezAinda não há avaliações
- Reaccion Del Combustible en Turbinas de Gas 182Documento12 páginasReaccion Del Combustible en Turbinas de Gas 182motonetaeraAinda não há avaliações
- Manual de Entrenamiento FactoryTalk Español COLORDocumento32 páginasManual de Entrenamiento FactoryTalk Español COLORMijail David Felix Narvaez71% (7)
- ENTRENAMIENTO OIL & GAS Sep13 (Seguridad Funcional) Updatedmayo14Documento81 páginasENTRENAMIENTO OIL & GAS Sep13 (Seguridad Funcional) Updatedmayo14Mijail David Felix NarvaezAinda não há avaliações
- Manual de Entrenamiento FactoryTalk Español COLORDocumento32 páginasManual de Entrenamiento FactoryTalk Español COLORMijail David Felix Narvaez71% (7)
- Óxidos de Nitrógeno NOx - EPADocumento62 páginasÓxidos de Nitrógeno NOx - EPAAlex GabrielAinda não há avaliações
- Dle Resumen de ControlDocumento38 páginasDle Resumen de ControlMijail David Felix NarvaezAinda não há avaliações
- Los Contaminantes AtmosféricosDocumento2 páginasLos Contaminantes AtmosféricosMijail David Felix NarvaezAinda não há avaliações
- Temperatura RosemourtDocumento34 páginasTemperatura RosemourtMijail David Felix NarvaezAinda não há avaliações
- Trasnmisores InteligentesDocumento32 páginasTrasnmisores InteligentesMijail David Felix NarvaezAinda não há avaliações
- Configuración de OPC LinkDocumento16 páginasConfiguración de OPC LinkMijail David Felix NarvaezAinda não há avaliações
- Configuración OPC Server TMR TrustedDocumento10 páginasConfiguración OPC Server TMR TrustedMijail David Felix NarvaezAinda não há avaliações
- Manual de Entrenamiento Del Sistema PDFDocumento303 páginasManual de Entrenamiento Del Sistema PDFMijail David Felix Narvaez100% (1)
- Sensores de VelocidadDocumento28 páginasSensores de VelocidadMijail David Felix NarvaezAinda não há avaliações
- Configuración de OPC LinkDocumento16 páginasConfiguración de OPC LinkMijail David Felix NarvaezAinda não há avaliações
- PD-8013 Paquete de Software de SOE e Historiador - 02!27!04Documento14 páginasPD-8013 Paquete de Software de SOE e Historiador - 02!27!04Mijail David Felix NarvaezAinda não há avaliações
- Cables TiposDocumento2 páginasCables TiposMijail David Felix NarvaezAinda não há avaliações
- PD-8082B Paquete de Software Trusted Toolset Suitte - 02!27!04Documento150 páginasPD-8082B Paquete de Software Trusted Toolset Suitte - 02!27!04Mijail David Felix Narvaez100% (1)
- Instruccion Add OnDocumento56 páginasInstruccion Add OnErwin GarciaAinda não há avaliações
- PD-8030 Paquete de Software Trusted Servidor OPCDocumento20 páginasPD-8030 Paquete de Software Trusted Servidor OPCMijail David Felix NarvaezAinda não há avaliações
- 1747 Manual RSLogix 500 Es PDocumento727 páginas1747 Manual RSLogix 500 Es PJorge William Bermudez Gaviria95% (21)
- Procedimiento de Bypass A NormalDocumento10 páginasProcedimiento de Bypass A NormalMijail David Felix NarvaezAinda não há avaliações
- PhaseManager PDFDocumento5 páginasPhaseManager PDFMijail David Felix NarvaezAinda não há avaliações
- Sensores de VelocidadDocumento28 páginasSensores de VelocidadMijail David Felix NarvaezAinda não há avaliações
- Programar PLC Allen Bradley RSLogix 5000Documento8 páginasProgramar PLC Allen Bradley RSLogix 5000Julián Aquiles TabordaAinda não há avaliações
- Filtro Activo para La Corrección de ArmónicosDocumento5 páginasFiltro Activo para La Corrección de ArmónicosMijail David Felix NarvaezAinda não há avaliações
- 05 SD Capitulo Iii Aritmetica Binaria BasicaDocumento8 páginas05 SD Capitulo Iii Aritmetica Binaria BasicaGerman ZarzaAinda não há avaliações
- APO objetivos gestiónDocumento2 páginasAPO objetivos gestiónhenry_pop_2Ainda não há avaliações
- Introducción a la logística internacionalDocumento150 páginasIntroducción a la logística internacionalJ Pablo Mendoza Crespo100% (2)
- Copiadecopiadetsbvsaves 0520210148 Vibsgfullfi 1631540125646Documento7 páginasCopiadecopiadetsbvsaves 0520210148 Vibsgfullfi 1631540125646Javier RamosAinda não há avaliações
- Buenas Practicas NCh03241-2017-043Documento68 páginasBuenas Practicas NCh03241-2017-043luis quesadaAinda não há avaliações
- Protocolo de Rio de JaneiroDocumento6 páginasProtocolo de Rio de JaneiroandyAinda não há avaliações
- Word HidrostaticaDocumento28 páginasWord HidrostaticaKENIA HERRERA JIMÉNEZAinda não há avaliações
- Unidad4 Operacion y Mantenibilidad PDFDocumento29 páginasUnidad4 Operacion y Mantenibilidad PDFmarthaalcala92Ainda não há avaliações
- Listado Productos KatunDocumento55 páginasListado Productos KatunragachilmexAinda não há avaliações
- Experiencia de JouleDocumento5 páginasExperiencia de JouleaaguinagaAinda não há avaliações
- Art Polanyi Estudio Del HombreDocumento13 páginasArt Polanyi Estudio Del HombreERika100% (1)
- Plan de Estudios de Educación ComercialDocumento4 páginasPlan de Estudios de Educación ComercialMelvin OrdoñezAinda não há avaliações
- API 650 Traduccion Apendice SDocumento12 páginasAPI 650 Traduccion Apendice SvctraulAinda não há avaliações
- DIAGNOSTICO EMPRESARIAL 3 EntrgaDocumento82 páginasDIAGNOSTICO EMPRESARIAL 3 EntrgaKaroll Jaineth Zambrano Caballero100% (1)
- Estudio BatimetriaDocumento13 páginasEstudio BatimetriaVeronica Andrea Urrutia EscobarAinda não há avaliações
- Ejercicio de Subneteo Con VLSM de Una Red Clase ADocumento9 páginasEjercicio de Subneteo Con VLSM de Una Red Clase ADanteballenaAinda não há avaliações
- ¿Qué Es La Sinonimia?: Se Llama A La Relación Entre Palabras Diversas Que Comparten Un Mismo SignificadoDocumento4 páginas¿Qué Es La Sinonimia?: Se Llama A La Relación Entre Palabras Diversas Que Comparten Un Mismo SignificadoJael BohorquezAinda não há avaliações
- Desarrollo Emprendedor Diagrama de Flujo Act #6Documento10 páginasDesarrollo Emprendedor Diagrama de Flujo Act #6MARIA DEL CARMEN0% (1)
- AeH2 Informe FinalDocumento228 páginasAeH2 Informe FinalCarlos Augusto VieiraAinda não há avaliações
- PHP y Firebird - Primera ParteDocumento54 páginasPHP y Firebird - Primera ParteHenry Leonardo Diaz GutierrezAinda não há avaliações
- Micro Aprendizaje Resumen Congreso IEI 2018-138Documento1 páginaMicro Aprendizaje Resumen Congreso IEI 2018-138Aracely Clemente TristánAinda não há avaliações
- Saci Esp - 2-ContadoresDocumento22 páginasSaci Esp - 2-ContadoresVEMATELAinda não há avaliações
- Reporte de HidraulicaDocumento16 páginasReporte de Hidraulicarosa maria100% (1)
- 12.tablas DinamicasDocumento9 páginas12.tablas DinamicasFELIPE SEPULVEDADAinda não há avaliações
- Secadora UNIMACDocumento26 páginasSecadora UNIMACingenieria seguimietos100% (1)
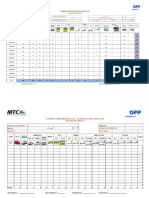
- Conteo Vehicular BorradorDocumento6 páginasConteo Vehicular BorradorCarlos NavarreteAinda não há avaliações
- Solidos Cristalinos y Amorfos-IntroduccionDocumento12 páginasSolidos Cristalinos y Amorfos-IntroduccionJoshuaShinne0% (1)
- Entorno de Desarrollo de Visual BasicDocumento5 páginasEntorno de Desarrollo de Visual BasicYahith Gutierrez GomezAinda não há avaliações
- Metodología FiaDocumento6 páginasMetodología FiaVictor EspejoAinda não há avaliações
- Calidad en El Desarrollo Del Software. Semana 1Documento2 páginasCalidad en El Desarrollo Del Software. Semana 1sergio1Ainda não há avaliações