Você também pode gostar
- Doub Int 3Documento1 páginaDoub Int 3Mehran ButtAinda não há avaliações
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Ainda não há avaliações
- Piv Ann1Documento4 páginasPiv Ann1pipul36Ainda não há avaliações
- Tables of Weber Functions: Mathematical Tables, Vol. 1No EverandTables of Weber Functions: Mathematical Tables, Vol. 1Ainda não há avaliações
- Fluid Mechanics Equations ExplainedDocumento37 páginasFluid Mechanics Equations ExplainedAHMED EL HAMRIAinda não há avaliações
- 3.4 Linearization of Nonlinear State Space Models: 1 F X Op 1 F X Op 2 F U Op 1 F U Op 2Documento3 páginas3.4 Linearization of Nonlinear State Space Models: 1 F X Op 1 F X Op 2 F U Op 1 F U Op 2Ilija TomicAinda não há avaliações
- MATH 443: Differential Geometry: Local Properties of SurfacesDocumento69 páginasMATH 443: Differential Geometry: Local Properties of SurfacesDerrick Akwasi AmankwahAinda não há avaliações
- Solution Manual For Continuum Mechanics For En3e R.N. Mase, B. Smelser, M. RossmannDocumento234 páginasSolution Manual For Continuum Mechanics For En3e R.N. Mase, B. Smelser, M. RossmannEduardo Mendoza96% (52)
- 3.2 Viscous Flow at High Reynolds NumbersDocumento3 páginas3.2 Viscous Flow at High Reynolds NumbersRatovoarisoaAinda não há avaliações
- Class Notes For Modern Physics Part 3Documento91 páginasClass Notes For Modern Physics Part 3api-26870484Ainda não há avaliações
- Mathematics 1b: Sheet 1 (Will Not Be Marked)Documento1 páginaMathematics 1b: Sheet 1 (Will Not Be Marked)PETERAinda não há avaliações
- Differential Conservation Equations - Part 1Documento6 páginasDifferential Conservation Equations - Part 1احمد الدلالAinda não há avaliações
- 1 Description: 2.1 General FormDocumento6 páginas1 Description: 2.1 General FormLeo LuisAinda não há avaliações
- Cachy IntegralDocumento3 páginasCachy Integralmujtaba21Ainda não há avaliações
- Local Theory of Surfaces: Reading: Millman and Parker CH 4: Sections 4.1 - 4.5Documento28 páginasLocal Theory of Surfaces: Reading: Millman and Parker CH 4: Sections 4.1 - 4.5Derrick Akwasi AmankwahAinda não há avaliações
- Surface Curves and Fundamental Forms: 1 The First Fundamental FormDocumento8 páginasSurface Curves and Fundamental Forms: 1 The First Fundamental FormVasi UtaAinda não há avaliações
- MA2741: Divergence theorem exercisesDocumento15 páginasMA2741: Divergence theorem exercisescannan meAinda não há avaliações
- Change of Variables for Improper Double IntegralsDocumento22 páginasChange of Variables for Improper Double IntegralsAliAinda não há avaliações
- 2015 HW 4 SolutionDocumento6 páginas2015 HW 4 Solutione_ghadirianAinda não há avaliações
- Triple Int16 8Documento7 páginasTriple Int16 8Nikoli MajorAinda não há avaliações
- Exercices Repetition 4Documento40 páginasExercices Repetition 4amine.haidaoui2000Ainda não há avaliações
- Assingment 2 Differential CalculusDocumento1 páginaAssingment 2 Differential CalculusGaurav VermaAinda não há avaliações
- zeta2Documento13 páginaszeta2focusssmodeAinda não há avaliações
- Examen FinalDocumento4 páginasExamen Finaloliver lopezAinda não há avaliações
- Calculo Integral Unidad 2Documento6 páginasCalculo Integral Unidad 2julio cesarAinda não há avaliações
- University College London: Curla Nds A DRDocumento3 páginasUniversity College London: Curla Nds A DRRoy VeseyAinda não há avaliações
- Exam MSC Atm09 SolnsDocumento7 páginasExam MSC Atm09 SolnswhateverAinda não há avaliações
- Three-Dimensional Analysis of Anisotropic Elastic Plates: Yoshitaka SuetakeDocumento9 páginasThree-Dimensional Analysis of Anisotropic Elastic Plates: Yoshitaka SuetakeHarsha HarAinda não há avaliações
- F18CD1 Tutorial 8 Solutions: U V U VDocumento5 páginasF18CD1 Tutorial 8 Solutions: U V U VNicholas ThamAinda não há avaliações
- Continuum Mechanics For Engineers Third (3rd) & 4th Edition Thomas Mase Solution Manual PDFDocumento10 páginasContinuum Mechanics For Engineers Third (3rd) & 4th Edition Thomas Mase Solution Manual PDFLuong NguyenAinda não há avaliações
- Lecture On MatricesDocumento5 páginasLecture On MatricesKhabab NazirAinda não há avaliações
- dx dy = r dθ dr.: ExampleDocumento7 páginasdx dy = r dθ dr.: Exampleemoh1Ainda não há avaliações
- Afd Lecture09Documento4 páginasAfd Lecture09zcap excelAinda não há avaliações
- Assignment 2 BLT AE19B102Documento34 páginasAssignment 2 BLT AE19B102Anuj NigamAinda não há avaliações
- Mat 613 Assignment 3Documento14 páginasMat 613 Assignment 3Taffohouo Nwaffeu Yves ValdezAinda não há avaliações
- Solution - Tutorial 4 (24 Feb 2021)Documento3 páginasSolution - Tutorial 4 (24 Feb 2021)shubhamAinda não há avaliações
- Problem 5.5Documento2 páginasProblem 5.5rahulkumar7250883289Ainda não há avaliações
- The Gauss CurvatureDocumento8 páginasThe Gauss Curvatureshek sonsonAinda não há avaliações
- Hand 24Documento14 páginasHand 24smartwb.bihAinda não há avaliações
- Differentiation of Vectors: Solutions: Example 4.1Documento6 páginasDifferentiation of Vectors: Solutions: Example 4.1Dimas GunturAinda não há avaliações
- Mixed Crack PropagateDocumento13 páginasMixed Crack PropagateMohammad Suriyaidulman RianseAinda não há avaliações
- Quantum Physics Operators Spherical CoordinatesDocumento12 páginasQuantum Physics Operators Spherical CoordinatesMutiara DierAinda não há avaliações
- Sma 2371 Pde DanDocumento58 páginasSma 2371 Pde DanArnoldAinda não há avaliações
- Assignment 2 - Solutions: 2 2 2 R X R yDocumento5 páginasAssignment 2 - Solutions: 2 2 2 R X R yDavidon JaniAinda não há avaliações
- Solution To Homework #6: Math220/Cme303: Pdes of Applied MathematicsDocumento8 páginasSolution To Homework #6: Math220/Cme303: Pdes of Applied MathematicsKashAinda não há avaliações
- Actas de Matematicas de La Universidad FenieceaeDocumento7 páginasActas de Matematicas de La Universidad FenieceaeChecozAinda não há avaliações
- Answers1 (1) Fluid MechanicsDocumento5 páginasAnswers1 (1) Fluid Mechanicsjoe valAinda não há avaliações
- MAT1322-3X Solution to Midterm 1(A) Summer 2014Documento3 páginasMAT1322-3X Solution to Midterm 1(A) Summer 2014Kokipro KokiproAinda não há avaliações
- PDEs of Partial Differential EquationsDocumento82 páginasPDEs of Partial Differential EquationsSayemin Naheen50% (4)
- Turbulent FlowDocumento2 páginasTurbulent FlowPatrick Joseph RoblesAinda não há avaliações
- Integrales Indefinidas EjerciciosDocumento11 páginasIntegrales Indefinidas Ejerciciosgian marcosAinda não há avaliações
- Supg NS 2DDocumento15 páginasSupg NS 2DruAinda não há avaliações
- 0 A R A R A R: Physics 505: Classical Electrodynamics Homework 2 3Documento2 páginas0 A R A R A R: Physics 505: Classical Electrodynamics Homework 2 3Heber AndradaAinda não há avaliações
- Vector CalculusDocumento15 páginasVector CalculusJEYADURGAAinda não há avaliações
- F19MV1 Final Exam SolutionsDocumento5 páginasF19MV1 Final Exam SolutionsZaki NiaziAinda não há avaliações
- Random Variables, Distributions, Multidimensional Random VariablesDocumento9 páginasRandom Variables, Distributions, Multidimensional Random VariableswillAinda não há avaliações
- Integral CalculusDocumento15 páginasIntegral CalculusShielaMaeRomeroPrestadoAinda não há avaliações
- MATB23+2021 08 17 - SolDocumento4 páginasMATB23+2021 08 17 - SolDiego GonzálezAinda não há avaliações
- Exercises 9.9: Independence of PathDocumento45 páginasExercises 9.9: Independence of PathGabriel OkaAinda não há avaliações
- SUNDEEP KUMAR M - Do Projected Changes in Climate Vary From Region To RegionDocumento2 páginasSUNDEEP KUMAR M - Do Projected Changes in Climate Vary From Region To RegionsreedharAinda não há avaliações
- Revised First Round MedicalDocumento1 páginaRevised First Round MedicalsreedharAinda não há avaliações
- Femalinete PDFDocumento1 páginaFemalinete PDFsreedharAinda não há avaliações
- Assfdljf PDFDocumento1 páginaAssfdljf PDFsreedharAinda não há avaliações
- Irctcs E-Ticketing Service Electronic Reservation Slip (Personal User)Documento1 páginaIrctcs E-Ticketing Service Electronic Reservation Slip (Personal User)sreedharAinda não há avaliações
- Timetable for UG1, UG2, UG3/UG4/MS/PhD CSE/ECE StudentsDocumento1 páginaTimetable for UG1, UG2, UG3/UG4/MS/PhD CSE/ECE StudentssreedharAinda não há avaliações
- S PH Polar Coords Jacobi AnsDocumento2 páginasS PH Polar Coords Jacobi AnssreedharAinda não há avaliações
- Profiling and Mitigating Brute Force Attack in Home Wireless LANDocumento6 páginasProfiling and Mitigating Brute Force Attack in Home Wireless LANAnonymous vw5rfXpAinda não há avaliações
- Covariant, Contravariant Vectors and Tensors: 2 N N N K KDocumento22 páginasCovariant, Contravariant Vectors and Tensors: 2 N N N K KsreedharAinda não há avaliações
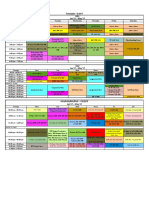
- Time Table Spring 2017 V5.1Documento1 páginaTime Table Spring 2017 V5.1sreedharAinda não há avaliações
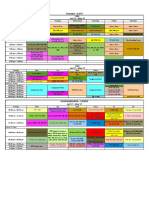
- Time Table Spring 2017 V4Documento1 páginaTime Table Spring 2017 V4sreedharAinda não há avaliações
- Profiling and Mitigating Brute Force Attack in Home Wireless LANDocumento6 páginasProfiling and Mitigating Brute Force Attack in Home Wireless LANAnonymous vw5rfXpAinda não há avaliações
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormNo EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormNota: 5 de 5 estrelas5/5 (5)
- Psychology Behind Mathematics - The Comprehensive GuideNo EverandPsychology Behind Mathematics - The Comprehensive GuideAinda não há avaliações
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingNo EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingNota: 4.5 de 5 estrelas4.5/5 (21)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Ainda não há avaliações
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsNo EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsNota: 5 de 5 estrelas5/5 (2)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeNo EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeNota: 4 de 5 estrelas4/5 (2)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusNo EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusNota: 4.5 de 5 estrelas4.5/5 (2)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenAinda não há avaliações
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.No EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Nota: 5 de 5 estrelas5/5 (1)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathNo EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathNota: 5 de 5 estrelas5/5 (1)
- A-level Maths Revision: Cheeky Revision ShortcutsNo EverandA-level Maths Revision: Cheeky Revision ShortcutsNota: 3.5 de 5 estrelas3.5/5 (8)
- Math Magic: How To Master Everyday Math ProblemsNo EverandMath Magic: How To Master Everyday Math ProblemsNota: 3.5 de 5 estrelas3.5/5 (15)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormNo EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormNota: 4.5 de 5 estrelas4.5/5 (20)
- Mental Math Secrets - How To Be a Human CalculatorNo EverandMental Math Secrets - How To Be a Human CalculatorNota: 5 de 5 estrelas5/5 (3)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsNo EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsNota: 3.5 de 5 estrelas3.5/5 (9)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceAinda não há avaliações
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldNo EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldNota: 3 de 5 estrelas3/5 (79)