Você também pode gostar
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Svyatoslav Covanov Rapport de Stage Recherche 2014Documento25 páginasSvyatoslav Covanov Rapport de Stage Recherche 2014BoppidiSrikanthAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Revealing Potential Performance Improvements by Utilizing Hybrid Work Sharing For Resource Intensive Seismic Applications PDFDocumento5 páginasRevealing Potential Performance Improvements by Utilizing Hybrid Work Sharing For Resource Intensive Seismic Applications PDFBoppidiSrikanthAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- PeterSutor HonorsThesis PDFDocumento77 páginasPeterSutor HonorsThesis PDFBoppidiSrikanthAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- 1407 3360 PDFDocumento28 páginas1407 3360 PDFBoppidiSrikanthAinda não há avaliações
- (Oxford Series in Electrical and Computer Engineering) Allen, Phillip E. - Holberg, Douglas R-CMOS Analog Circuit Design-Oxford University Press, USA (2011)Documento783 páginas(Oxford Series in Electrical and Computer Engineering) Allen, Phillip E. - Holberg, Douglas R-CMOS Analog Circuit Design-Oxford University Press, USA (2011)ASDFER100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Furer PDFDocumento9 páginasFurer PDFBoppidiSrikanthAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Performance-Energy Optimizations For Shared Vector Accelerators in Multicores PDFDocumento13 páginasPerformance-Energy Optimizations For Shared Vector Accelerators in Multicores PDFBoppidiSrikanthAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Reducing FPGA Algorithm Area by Avoiding Redundant Computation PDFDocumento6 páginasReducing FPGA Algorithm Area by Avoiding Redundant Computation PDFBoppidiSrikanthAinda não há avaliações
- Rapid Heterogeneous Prototyping From Simulink PDFDocumento6 páginasRapid Heterogeneous Prototyping From Simulink PDFBoppidiSrikanthAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Population-Based MCMC On Multi-Core CPUs, GPUs and FPGAs PDFDocumento14 páginasPopulation-Based MCMC On Multi-Core CPUs, GPUs and FPGAs PDFBoppidiSrikanthAinda não há avaliações
- NoC Centric Partitioning and Reconfiguration Technologies For The Efficient Sharing of Multi Core Programmable Accelerators PDFDocumento3 páginasNoC Centric Partitioning and Reconfiguration Technologies For The Efficient Sharing of Multi Core Programmable Accelerators PDFBoppidiSrikanthAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Pipelined Decision Tree Classification Accelerator Implementation in FPGA (DT-CAIF) PDFDocumento6 páginasPipelined Decision Tree Classification Accelerator Implementation in FPGA (DT-CAIF) PDFBoppidiSrikanthAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Hardware-Acceleration of Short-Read Alignment Based On The Burrows-Wheeler Transform PDFDocumento14 páginasHardware-Acceleration of Short-Read Alignment Based On The Burrows-Wheeler Transform PDFBoppidiSrikanthAinda não há avaliações
- MACRON The NoC Based Many Core Parallel Processign Platform and Its Applicatons in 4G Communication Systems PDFDocumento8 páginasMACRON The NoC Based Many Core Parallel Processign Platform and Its Applicatons in 4G Communication Systems PDFBoppidiSrikanthAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- PXIe-Based LLRF Architecture and Versatile Test Bench For Heavy Ion Linear Acceleration PDFDocumento9 páginasPXIe-Based LLRF Architecture and Versatile Test Bench For Heavy Ion Linear Acceleration PDFBoppidiSrikanthAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Optimised Multiplication Architectures For Accelerating Fully Homomorphic Encryption PDFDocumento13 páginasOptimised Multiplication Architectures For Accelerating Fully Homomorphic Encryption PDFBoppidiSrikanthAinda não há avaliações
- Mitigating Memory-Induced Dark Silicon in Many-Accelerator Architectures PDFDocumento4 páginasMitigating Memory-Induced Dark Silicon in Many-Accelerator Architectures PDFBoppidiSrikanthAinda não há avaliações
- HMFPCC Hybrid Mode Floating Point Conversion Co Processor PDFDocumento6 páginasHMFPCC Hybrid Mode Floating Point Conversion Co Processor PDFBoppidiSrikanthAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- FPGA Based Accelerator For Visual Features Detection PDFDocumento6 páginasFPGA Based Accelerator For Visual Features Detection PDFBoppidiSrikanthAinda não há avaliações
- Hardware Implementation On FPGA For Tasklevel Parallel Dataflow Execution Engine PDFDocumento14 páginasHardware Implementation On FPGA For Tasklevel Parallel Dataflow Execution Engine PDFBoppidiSrikanthAinda não há avaliações
- Loop Coarsening in C Based High Level Synthesis PDFDocumento8 páginasLoop Coarsening in C Based High Level Synthesis PDFBoppidiSrikanthAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- High Performance Sparse LU Solver FPGA Accelerator Using A Static Synchronous Data Flow Model PDFDocumento1 páginaHigh Performance Sparse LU Solver FPGA Accelerator Using A Static Synchronous Data Flow Model PDFBoppidiSrikanthAinda não há avaliações
- Heterogeneous Cloud Framework For Big Data Genome Sequencing PDFDocumento13 páginasHeterogeneous Cloud Framework For Big Data Genome Sequencing PDFBoppidiSrikanthAinda não há avaliações
- Hardware Accelerators For Informnation Retrieval and Data Mining PDFDocumento4 páginasHardware Accelerators For Informnation Retrieval and Data Mining PDFBoppidiSrikanthAinda não há avaliações
- FPGA Based Accelerating Platform For Big Data Matrix Processing PDFDocumento4 páginasFPGA Based Accelerating Platform For Big Data Matrix Processing PDFBoppidiSrikanthAinda não há avaliações
- FPGA Implementation of Low-Power 3D Ultrasound Beamformer PDFDocumento4 páginasFPGA Implementation of Low-Power 3D Ultrasound Beamformer PDFBoppidiSrikanthAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Hardware Accelerator For Similarity Bassed Data Dedupe PDFDocumento9 páginasHardware Accelerator For Similarity Bassed Data Dedupe PDFBoppidiSrikanthAinda não há avaliações
- Framework For A Selection of Custom Instructions For Ht-MPSoC in Area-Performance Aware Manner PDFDocumento4 páginasFramework For A Selection of Custom Instructions For Ht-MPSoC in Area-Performance Aware Manner PDFBoppidiSrikanthAinda não há avaliações
- Lolita Enrico Vs Heirs of Spouses Eulogio Medinaceli and Trinidad MedinaceliDocumento3 páginasLolita Enrico Vs Heirs of Spouses Eulogio Medinaceli and Trinidad Medinacelichatmche-06Ainda não há avaliações
- Computer Literacy Skills and Self-Efficacy Among Grade-12 - Computer System Servicing (CSS) StudentsDocumento25 páginasComputer Literacy Skills and Self-Efficacy Among Grade-12 - Computer System Servicing (CSS) StudentsNiwre Gumangan AguiwasAinda não há avaliações
- Contents:: Project ProgressDocumento22 páginasContents:: Project ProgressJosé VicenteAinda não há avaliações
- SD OverviewDocumento85 páginasSD OverviewSamatha GantaAinda não há avaliações
- Use of ICT in School AdministartionDocumento32 páginasUse of ICT in School AdministartionSyed Ali Haider100% (1)
- People V Galano, Caubang v. PeopleDocumento2 páginasPeople V Galano, Caubang v. PeopleHermay Banario50% (2)
- What Is Innovation A ReviewDocumento33 páginasWhat Is Innovation A ReviewAnonymous EnIdJOAinda não há avaliações
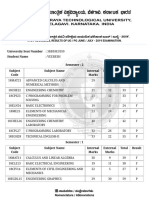
- VTU Result PDFDocumento2 páginasVTU Result PDFVaibhavAinda não há avaliações
- 208 C - Algebras: Marc Rieffel Notes by Qiaochu Yuan Spring 2013Documento55 páginas208 C - Algebras: Marc Rieffel Notes by Qiaochu Yuan Spring 2013Nikos AthanasiouAinda não há avaliações
- D78846GC20 sg2Documento356 páginasD78846GC20 sg2hilordAinda não há avaliações
- Module 4 Business EthicsDocumento4 páginasModule 4 Business EthicsddddddaaaaeeeeAinda não há avaliações
- Kepimpinan BerwawasanDocumento18 páginasKepimpinan BerwawasanandrewanumAinda não há avaliações
- Accounting TheoryDocumento192 páginasAccounting TheoryABDULLAH MOHAMMEDAinda não há avaliações
- Canine HyperlipidaemiaDocumento11 páginasCanine Hyperlipidaemiaheidy acostaAinda não há avaliações
- Iml601 Week 4 AbsDocumento69 páginasIml601 Week 4 AbsNur Nazurah NordinAinda não há avaliações
- NHÓM ĐỘNG TỪ BẤT QUY TẮCDocumento4 páginasNHÓM ĐỘNG TỪ BẤT QUY TẮCNhựt HàoAinda não há avaliações
- Chapter 1Documento6 páginasChapter 1Alyssa DuranoAinda não há avaliações
- Roman Catholic Bishop of Jaro v. Dela PenaDocumento2 páginasRoman Catholic Bishop of Jaro v. Dela PenaBeltran KathAinda não há avaliações
- Position Paper Guns Dont Kill People Final DraftDocumento6 páginasPosition Paper Guns Dont Kill People Final Draftapi-273319954Ainda não há avaliações
- Child Labour: Summary: Is The Imposition of Sanctions On States The Best Way To End ChildDocumento3 páginasChild Labour: Summary: Is The Imposition of Sanctions On States The Best Way To End ChildPrinting PandaAinda não há avaliações
- What Is Art?Documento14 páginasWhat Is Art?Sarvenaaz QaffariAinda não há avaliações
- Lesson 4 Present Simple and Present Continuous Part 2Documento2 páginasLesson 4 Present Simple and Present Continuous Part 2DeniseVuoto100% (1)
- 11 Chemistry NcertSolutions Chapter 2 ExercisesDocumento54 páginas11 Chemistry NcertSolutions Chapter 2 ExercisesGeeteshGuptaAinda não há avaliações
- SuratiDocumento2 páginasSuratiTariq Mehmood TariqAinda não há avaliações
- Transportation Research Part F: Andreas Lieberoth, Niels Holm Jensen, Thomas BredahlDocumento16 páginasTransportation Research Part F: Andreas Lieberoth, Niels Holm Jensen, Thomas BredahlSayani MandalAinda não há avaliações
- Social Contract Theory - Internet Encyclopedia of PhilosophyDocumento28 páginasSocial Contract Theory - Internet Encyclopedia of Philosophywolf1804100% (1)
- Form Aplikasi CCAI GTP 2011Documento5 páginasForm Aplikasi CCAI GTP 2011Tomo SiagianAinda não há avaliações
- Diplomatic Quarter New Marriott Hotel & Executive ApartmentsDocumento1 páginaDiplomatic Quarter New Marriott Hotel & Executive Apartmentsconsultnadeem70Ainda não há avaliações
- Adjective Clauses: Relative Pronouns & Relative ClausesDocumento4 páginasAdjective Clauses: Relative Pronouns & Relative ClausesJaypee MelendezAinda não há avaliações
- List of Festivals in India - WikipediaDocumento13 páginasList of Festivals in India - WikipediaRashmi RaviAinda não há avaliações
- Chip War: The Fight for the World's Most Critical TechnologyNo EverandChip War: The Fight for the World's Most Critical TechnologyNota: 4.5 de 5 estrelas4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyNo EverandChip War: The Quest to Dominate the World's Most Critical TechnologyNota: 4.5 de 5 estrelas4.5/5 (228)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsNo EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsNota: 5 de 5 estrelas5/5 (3)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)No EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Nota: 5 de 5 estrelas5/5 (2)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]No EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Nota: 5 de 5 estrelas5/5 (2)