Você também pode gostar
- Peripheral DevicesDocumento14 páginasPeripheral DevicesManoj Reddy GudaAinda não há avaliações
- Input-Output OrganizationDocumento15 páginasInput-Output OrganizationGAURISH GARGAinda não há avaliações
- I O OrganizationDocumento26 páginasI O Organization08-Avinash SAinda não há avaliações
- Cod Unit 4Documento50 páginasCod Unit 4anilAinda não há avaliações
- Input-Output OrganizationDocumento39 páginasInput-Output OrganizationTamanna SharmaAinda não há avaliações
- The Computer System Computer Function and Interconnection o Computer Functions o Interconnection Structures o Bus InterconnectionDocumento71 páginasThe Computer System Computer Function and Interconnection o Computer Functions o Interconnection Structures o Bus Interconnectiongaurav99rocksAinda não há avaliações
- Unit 4Documento48 páginasUnit 4Anmol D. PradhanAinda não há avaliações
- A394982016 16523 11 2019 Chapter8.00Documento39 páginasA394982016 16523 11 2019 Chapter8.00yogesh kumarAinda não há avaliações
- 5273.CS1012 CH11 IooDocumento20 páginas5273.CS1012 CH11 IooJaideep ChoudharyAinda não há avaliações
- Unit 4Documento53 páginasUnit 4Brajesh KumarAinda não há avaliações
- IntroductionDocumento32 páginasIntroductionKaseya TakahashiAinda não há avaliações
- Coa Unit-4 NotesDocumento44 páginasCoa Unit-4 NotesKavya ReddyAinda não há avaliações
- 88ee7bc9 1635737924675Documento54 páginas88ee7bc9 1635737924675roopshree udaiwalAinda não há avaliações
- Computer Organization & Architecture Unit - 5Documento24 páginasComputer Organization & Architecture Unit - 5Ajay KumarAinda não há avaliações
- Microprocessors and Programming: Bus Architecture and CPU OperationDocumento50 páginasMicroprocessors and Programming: Bus Architecture and CPU OperationEmirhan AlmaAinda não há avaliações
- 28-5-I O Fundamentals Handshaking, Buffering-20!10!2021 (20-Oct-2021) Material I 20-10-2021 Unit-5-Lecture1Documento15 páginas28-5-I O Fundamentals Handshaking, Buffering-20!10!2021 (20-Oct-2021) Material I 20-10-2021 Unit-5-Lecture1Mudit Jain100% (1)
- CO - Lecture 10Documento11 páginasCO - Lecture 10Daddy YouAinda não há avaliações
- Computer Buses: What Is A Bus?Documento14 páginasComputer Buses: What Is A Bus?masumiAinda não há avaliações
- Chapter 6 (Input-Output Organization)Documento31 páginasChapter 6 (Input-Output Organization)Tahjib Ahmed SiddiqueAinda não há avaliações
- Computer IO Buses and InterfacesDocumento28 páginasComputer IO Buses and InterfacesRS Panneer SelvanAinda não há avaliações
- EE2354 Unit 1 PDFDocumento4 páginasEE2354 Unit 1 PDFa durgadeviAinda não há avaliações
- Structure and Function of The Expansion BusDocumento13 páginasStructure and Function of The Expansion BusHassan MohamedAinda não há avaliações
- COA UNIT-IV PPTS Dr.G.Bhaskar ECEDocumento39 páginasCOA UNIT-IV PPTS Dr.G.Bhaskar ECECharan Sai ReddyAinda não há avaliações
- Bus Systems: What Is A Bus?Documento18 páginasBus Systems: What Is A Bus?ShwiftyAinda não há avaliações
- Input Output OrganizationDocumento30 páginasInput Output OrganizationGiri Saranu100% (22)
- Input/Output: The Computer's Response Time Is No Match For OursDocumento108 páginasInput/Output: The Computer's Response Time Is No Match For OursPrashantJoshiAinda não há avaliações
- Introduction To MicroprocessorDocumento21 páginasIntroduction To MicroprocessorLai Yon PengAinda não há avaliações
- Interconnection StructuresDocumento43 páginasInterconnection Structuresaryans1489% (36)
- Chapter 6Documento36 páginasChapter 6prince bistAinda não há avaliações
- Microprocessor & Computer Architecture (Μpca) : I/O And Bus ArchitectureDocumento28 páginasMicroprocessor & Computer Architecture (Μpca) : I/O And Bus ArchitecturePranathi PraveenAinda não há avaliações
- Ch11 1Documento19 páginasCh11 1Shubham ChaurasiaAinda não há avaliações
- Asynchronous Data TransferDocumento26 páginasAsynchronous Data TransferVYOM GUPTA 20BCE2099Ainda não há avaliações
- CHAPTER 6. Buses & Interfacing: Ec303 - Computer Architecture & OrganizationDocumento17 páginasCHAPTER 6. Buses & Interfacing: Ec303 - Computer Architecture & OrganizationPrevenaManiamAinda não há avaliações
- WINSEM2023-24_BCSE205L_TH_VL2023240500897_2024-03-16_Reference-Material-IDocumento20 páginasWINSEM2023-24_BCSE205L_TH_VL2023240500897_2024-03-16_Reference-Material-Iprathampalgandhi10Ainda não há avaliações
- Von Neumann Computer Bus ArchitectureDocumento19 páginasVon Neumann Computer Bus ArchitectureJoshua AyoolaAinda não há avaliações
- MP ND MCDocumento58 páginasMP ND MCPraveen SinghAinda não há avaliações
- L-4 Peripheral Interfac by Arpita MamDocumento32 páginasL-4 Peripheral Interfac by Arpita MamAbul Hasan 2Ainda não há avaliações
- CPU Architecture: Control Unit (CU)Documento10 páginasCPU Architecture: Control Unit (CU)i study100% (1)
- 1.4 Describe Input Output Data Transfer - UpdateDocumento43 páginas1.4 Describe Input Output Data Transfer - Update00.wonderer.00Ainda não há avaliações
- Parallel I/O Interface FundamentalsDocumento14 páginasParallel I/O Interface Fundamentalsestraj1954Ainda não há avaliações
- 1.basic Organization of Computer & ArchitectureDocumento17 páginas1.basic Organization of Computer & ArchitectureProsperAinda não há avaliações
- WINSEM2023-24_BCSE205L_TH_VL2023240500897_2024-03-18_Reference-Material-IDocumento40 páginasWINSEM2023-24_BCSE205L_TH_VL2023240500897_2024-03-18_Reference-Material-Iprathampalgandhi10Ainda não há avaliações
- Architecture IIDocumento158 páginasArchitecture IIGafeer FableAinda não há avaliações
- LECTURE1 INTROv2Documento22 páginasLECTURE1 INTROv2AmriAinda não há avaliações
- Introduction to Computer Systems: Structure and ProcessesDocumento27 páginasIntroduction to Computer Systems: Structure and ProcessesTharshukutty BabypriyaAinda não há avaliações
- CH 8 Input-OutputDocumento34 páginasCH 8 Input-OutputHiywot yesufAinda não há avaliações
- Lecture1 IntroDocumento20 páginasLecture1 IntroathomeAinda não há avaliações
- William Stallings Computer Organization and Architecture 7 EditionDocumento41 páginasWilliam Stallings Computer Organization and Architecture 7 EditionINDIAN SQUATCHERAinda não há avaliações
- Input-Output OrganizationDocumento12 páginasInput-Output OrganizationRam GaneshAinda não há avaliações
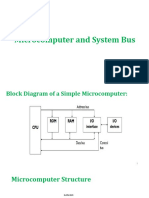
- Microcomputer and System BUSDocumento25 páginasMicrocomputer and System BUSRocky SamratAinda não há avaliações
- Computer Organization: Lec # 9: Bus System Bnar MustafaDocumento29 páginasComputer Organization: Lec # 9: Bus System Bnar Mustafazara qojo (زارا)Ainda não há avaliações
- 3-Interconnection of Components - Overview of IAS Computer Function-06-01-2024Documento12 páginas3-Interconnection of Components - Overview of IAS Computer Function-06-01-2024vanchagargAinda não há avaliações
- Week 1 - Introduction to 8085Documento27 páginasWeek 1 - Introduction to 8085Nur AimanAinda não há avaliações
- Input-Output9-6-2021Documento53 páginasInput-Output9-6-2021zkd9n8f6kfAinda não há avaliações
- STM32F3 UsartDocumento67 páginasSTM32F3 UsartZarija Aleksoski100% (1)
- Interrupt Initiated I/O and DMA in Computer OrganizationDocumento67 páginasInterrupt Initiated I/O and DMA in Computer Organizationjinto0007Ainda não há avaliações
- Lecture 17 IO InterfaceDocumento8 páginasLecture 17 IO InterfaceAkshat KeshariAinda não há avaliações
- Practical Data Acquisition for Instrumentation and Control SystemsNo EverandPractical Data Acquisition for Instrumentation and Control SystemsAinda não há avaliações
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Ainda não há avaliações
- Small DC Motor Control by PWM Method Using Atmega8Documento4 páginasSmall DC Motor Control by PWM Method Using Atmega8Emin KültürelAinda não há avaliações
- 4x4 Matrix Key-Board Interfacing With ATmega32Documento6 páginas4x4 Matrix Key-Board Interfacing With ATmega32Emin Kültürel100% (1)
- Circuit Schematic LiPo Battery Charger Using LM324 ICDocumento3 páginasCircuit Schematic LiPo Battery Charger Using LM324 ICEmin Kültürel0% (1)
- Digital Hardware 2 - Good-Avr-TutorialDocumento14 páginasDigital Hardware 2 - Good-Avr-TutorialEmin KültürelAinda não há avaliações
- EE 109 Unit 18 - Noise Margins, Interfacing, and Tri-StatesDocumento22 páginasEE 109 Unit 18 - Noise Margins, Interfacing, and Tri-StatesEmin KültürelAinda não há avaliações
- Lecture5 Data Stuctures AlgorithmsDocumento53 páginasLecture5 Data Stuctures AlgorithmsEmin KültürelAinda não há avaliações
- Microcontroller Tutorial Ii Timers: What Is A Timer?Documento13 páginasMicrocontroller Tutorial Ii Timers: What Is A Timer?Ting Chee SiongAinda não há avaliações
- Accessing AVR EEPROM Memory in AVRGCCDocumento9 páginasAccessing AVR EEPROM Memory in AVRGCCEmin KültürelAinda não há avaliações
- Users Guide (Ac PG Usbasp Ug v2.0)Documento24 páginasUsers Guide (Ac PG Usbasp Ug v2.0)mendimanoAinda não há avaliações
- Newbies Guide To Avr Timers-10Documento18 páginasNewbies Guide To Avr Timers-10Emin KültürelAinda não há avaliações
- C Programming in Avr StudioDocumento12 páginasC Programming in Avr StudioMallika BhatAinda não há avaliações
- EE 109 Unit 20: IEEE 754 Floating Point Representation Floating Point ArithmeticDocumento31 páginasEE 109 Unit 20: IEEE 754 Floating Point Representation Floating Point ArithmeticEmin KültürelAinda não há avaliações
- Makalah Hematologi AnalyzerDocumento15 páginasMakalah Hematologi AnalyzerRizky WaldianAinda não há avaliações
- Microcontroller Tutorials 1: What Is An Embedded System?Documento12 páginasMicrocontroller Tutorials 1: What Is An Embedded System?KBSMANITAinda não há avaliações
- EE 109 Unit 10 - Pulse Width ModulationDocumento16 páginasEE 109 Unit 10 - Pulse Width ModulationEmin KültürelAinda não há avaliações
- Introduction To Computer Science-1Documento46 páginasIntroduction To Computer Science-1Emin KültürelAinda não há avaliações
- Unit 8 - RecursionDocumento16 páginasUnit 8 - RecursionEmin KültürelAinda não há avaliações
- Introduction To Computer Science-1Documento46 páginasIntroduction To Computer Science-1Emin KültürelAinda não há avaliações
- Real-time microcontroller timer using ATME8535Documento4 páginasReal-time microcontroller timer using ATME8535Emin KültürelAinda não há avaliações
- EE109Unit18 NoiseMarginCMOS NotesDocumento7 páginasEE109Unit18 NoiseMarginCMOS NotesEmin KültürelAinda não há avaliações
- EMC Design ConsiderationsDocumento12 páginasEMC Design ConsiderationsEmin KültürelAinda não há avaliações
- Lecture5 Data Stuctures AlgorithmsDocumento53 páginasLecture5 Data Stuctures AlgorithmsEmin KültürelAinda não há avaliações
- Using The AVR Hardware MultiplierDocumento10 páginasUsing The AVR Hardware MultiplierEmin KültürelAinda não há avaliações
- Intro to Abstract Machines and TheoryDocumento40 páginasIntro to Abstract Machines and TheoryEmin KültürelAinda não há avaliações
- C Code For Interfacing AVR® To AT17CXX FPGA Configuration MemoryDocumento19 páginasC Code For Interfacing AVR® To AT17CXX FPGA Configuration MemoryEmin KültürelAinda não há avaliações
- Writing - Code For MicrocontrollersDocumento17 páginasWriting - Code For Microcontrollersmoorthy100% (1)
- TL7705 Voltage SupervisorDocumento19 páginasTL7705 Voltage SupervisorEmin KültürelAinda não há avaliações
- Watchdog Timer ATMEL 8 BitsDocumento17 páginasWatchdog Timer ATMEL 8 BitsvichecursedAinda não há avaliações
- Basic - Hardware - AVR Hardware TipsDocumento17 páginasBasic - Hardware - AVR Hardware TipsEmin KültürelAinda não há avaliações
- AVR335 - Digital Sound RecorderDocumento20 páginasAVR335 - Digital Sound RecorderChevalier De BalibariAinda não há avaliações
- Sim800h PDFDocumento1 páginaSim800h PDFAnonymous BkmsKXzwyKAinda não há avaliações
- IE-612 HA17393 Comparador Dual PDFDocumento8 páginasIE-612 HA17393 Comparador Dual PDFnadie nadaAinda não há avaliações
- Chisel BookDocumento34 páginasChisel BookGuoli LvAinda não há avaliações
- COE 758 - Xilinx ISE 13.4 Tutorial 2 ChipScope Pro OverviewDocumento36 páginasCOE 758 - Xilinx ISE 13.4 Tutorial 2 ChipScope Pro Overviewudara11Ainda não há avaliações
- Pan 3401Documento15 páginasPan 3401Sanz Flrntin SkottAinda não há avaliações
- Nissan Connect Digital Audio PDI ReprogramDocumento9 páginasNissan Connect Digital Audio PDI ReprogramCristian DobreAinda não há avaliações
- Ipchfw5231ep Z12eDocumento3 páginasIpchfw5231ep Z12edanielsan740% (1)
- Brochure Automotive EN - Web PDFDocumento88 páginasBrochure Automotive EN - Web PDFCelso Quevedo MonteiroAinda não há avaliações
- World's First Collaborative SCARA Robot PF400Documento2 páginasWorld's First Collaborative SCARA Robot PF400claudiu feierAinda não há avaliações
- Ext - FHD v3 - 20101230Documento24 páginasExt - FHD v3 - 20101230Ralph ClarkAinda não há avaliações
- DSP Exam AidDocumento7 páginasDSP Exam AidAnonymous cYhhyVAinda não há avaliações
- Datasheet RJP30H1 PDFDocumento7 páginasDatasheet RJP30H1 PDFMartín SayagoAinda não há avaliações
- SIP 06 Restoration PDFDocumento70 páginasSIP 06 Restoration PDFsanju subramaniAinda não há avaliações
- 2011 Ph.D. - Technologies For Wearable and Portable Physiological Measurement DevicesDocumento143 páginas2011 Ph.D. - Technologies For Wearable and Portable Physiological Measurement DevicesCostas MoraitisAinda não há avaliações
- Analyze 900 Coverage Reduction from High RTWP InterferenceDocumento4 páginasAnalyze 900 Coverage Reduction from High RTWP InterferenceAdil MuradAinda não há avaliações
- DVRDocumento18 páginasDVRbsnl_cellone47100% (1)
- Free Plugin Tool Box - Edition 1 - Creative Sound LabDocumento14 páginasFree Plugin Tool Box - Edition 1 - Creative Sound LabRodrigo FerreiraAinda não há avaliações
- Aristofeed 30 4 Aristofeed 48 4: Service ManualDocumento30 páginasAristofeed 30 4 Aristofeed 48 4: Service Manualatual manutencaoAinda não há avaliações
- 20 Watts Output Power With An Intercom Function: ModelDocumento2 páginas20 Watts Output Power With An Intercom Function: ModelbjornutAinda não há avaliações
- Instructions: PG Speed Control Card Pg-X2Documento19 páginasInstructions: PG Speed Control Card Pg-X2Mehedi HasanAinda não há avaliações
- ARM7TDMIDocumento268 páginasARM7TDMICatalin Constantin PopaAinda não há avaliações
- Chapter 5Documento66 páginasChapter 5Cheng Ching HaoAinda não há avaliações
- Spyder Family HONEYWELLDocumento1 páginaSpyder Family HONEYWELLRaphael LopesAinda não há avaliações
- Need For Earthing and Double Insulation PDFDocumento2 páginasNeed For Earthing and Double Insulation PDFMeAinda não há avaliações
- Reque 6.1Documento132 páginasReque 6.1WILSON ALEXANDER CHIRAN ALPALAAinda não há avaliações
- Hfview Software: "Hfview Software" Instruction Manual Rev. #0 of 23/05/2011 File:Hfview - GB - Rev0Documento58 páginasHfview Software: "Hfview Software" Instruction Manual Rev. #0 of 23/05/2011 File:Hfview - GB - Rev0Eriflona100% (1)
- Daewoo DP42SMLV Service ManualDocumento62 páginasDaewoo DP42SMLV Service ManualReginald SosaAinda não há avaliações
- 7 Segment DisplayDocumento4 páginas7 Segment DisplayElectronic spicesAinda não há avaliações
- NTE2971 Mosfet N-Channel, Enhancement Mode High Speed SwitchDocumento2 páginasNTE2971 Mosfet N-Channel, Enhancement Mode High Speed Switchjulio797Ainda não há avaliações
- Megger PricelistDocumento2 páginasMegger PricelistNagendraAinda não há avaliações