Você também pode gostar
- Volvo Ecu d12dDocumento14 páginasVolvo Ecu d12dRonald Gareca Rueda95% (63)
- GDI 3.5 6G74 ManualDocumento263 páginasGDI 3.5 6G74 ManualOlga Plohotnichenko84% (37)
- Subaru Mod. 406 Fuel Injection & Engine ManagementDocumento55 páginasSubaru Mod. 406 Fuel Injection & Engine ManagementDavid VelazquezAinda não há avaliações
- Istqb NotesDocumento11 páginasIstqb Notesmadhumohan100% (2)
- Selinium NotesDocumento64 páginasSelinium NotesSanjana GoudaAinda não há avaliações
- Comprehensive Guide To Operational Technology CybersecurityDocumento68 páginasComprehensive Guide To Operational Technology CybersecurityDea Josh FarroAinda não há avaliações
- Information Security NotesDocumento217 páginasInformation Security NotesAbhinav Dixit100% (6)
- PPR VerdeDocumento96 páginasPPR VerdeIonut SomneaAinda não há avaliações
- Vdocuments - MX EchometerDocumento35 páginasVdocuments - MX EchometerGTO Golfo Tundra OptmizacionAinda não há avaliações
- Areas clasificadas-IECDocumento1 páginaAreas clasificadas-IECChristian ChdAinda não há avaliações
- IEC 62491-2008 Labelling of Cables and CoresDocumento64 páginasIEC 62491-2008 Labelling of Cables and CoresTu Nguyen TraiAinda não há avaliações
- 2.1.2 Ayala - Cybersecurity StandardsDocumento49 páginas2.1.2 Ayala - Cybersecurity Standardsmika cabelloAinda não há avaliações
- GAVC 1200 Functional Description - 1518165531 - 687c34ad PDFDocumento21 páginasGAVC 1200 Functional Description - 1518165531 - 687c34ad PDFAhsan SiddiquiAinda não há avaliações
- Volkswagen Service Training Engine Management SystemsDocumento10 páginasVolkswagen Service Training Engine Management Systemsrichard100% (50)
- Advantech - Catalogo Geral - Oil & GasDocumento8 páginasAdvantech - Catalogo Geral - Oil & GasMarcelo MarceloAinda não há avaliações
- 9968specification For Elasomeric Cables - 1Documento14 páginas9968specification For Elasomeric Cables - 1aashish_rajj100% (1)
- (509869149) Leak DetectionDocumento12 páginas(509869149) Leak Detectionsathish_iyengarAinda não há avaliações
- National Grid Blue Book 2009Documento232 páginasNational Grid Blue Book 2009KiddAinda não há avaliações
- Arunangshu Bhattacharjee ResumeDocumento3 páginasArunangshu Bhattacharjee ResumeArunangshu BhattacharjeeAinda não há avaliações
- Stator RTD Sensor 300Documento4 páginasStator RTD Sensor 300Cristian GarcíaAinda não há avaliações
- IPC2022 87194 Enhancing MFL A Ultra UtilizingFEM JSpille FinalDocumento5 páginasIPC2022 87194 Enhancing MFL A Ultra UtilizingFEM JSpille FinalOswaldo MontenegroAinda não há avaliações
- Ge Ifix - Opc A and e Server For Proficy Ifix Ifix 5.8 Sp2Documento41 páginasGe Ifix - Opc A and e Server For Proficy Ifix Ifix 5.8 Sp2Omar Alfredo Del Castillo100% (1)
- NETACTDocumento12 páginasNETACTCHIRAG NAGPAL100% (1)
- Introduction To PID ControlDocumento6 páginasIntroduction To PID ControlIonescu ViorelAinda não há avaliações
- Ge Ifix - Lan Redundancy Ifix 5.8 Sp2Documento39 páginasGe Ifix - Lan Redundancy Ifix 5.8 Sp2Omar Alfredo Del Castillo100% (1)
- IFIX With FIX DesktopDocumento1.134 páginasIFIX With FIX Desktopchris75726Ainda não há avaliações
- FocalSpec Online Coil Edge Quality Measurement - 8 2012Documento24 páginasFocalSpec Online Coil Edge Quality Measurement - 8 2012Pradeep Beldar100% (1)
- Electrical Measurement & Instrumentation Course Outline: Text Book / Essential ReadingDocumento3 páginasElectrical Measurement & Instrumentation Course Outline: Text Book / Essential Readingzaman_munooAinda não há avaliações
- E Rack and Pinion SystemsDocumento32 páginasE Rack and Pinion Systemsngirish1990Ainda não há avaliações
- ConveyorDocumento42 páginasConveyorPratap ValekarAinda não há avaliações
- Orifice FlowMeterDocumento12 páginasOrifice FlowMetersanggul elli noraAinda não há avaliações
- Det-Tronics - 92-1037-06Documento4 páginasDet-Tronics - 92-1037-06Javierfox98Ainda não há avaliações
- Clamps, Utility, Laboratory, and Holders, Buret and Clamp: Standard Specification ForDocumento6 páginasClamps, Utility, Laboratory, and Holders, Buret and Clamp: Standard Specification ForAhmed AlzubaidiAinda não há avaliações
- Coil World Vol 21 Issue 6 - Nov-Dec 2016Documento36 páginasCoil World Vol 21 Issue 6 - Nov-Dec 2016cuongdcAinda não há avaliações
- Everything You Need To Know About Flatteners and Levelers For Coil Processing - Part IVDocumento7 páginasEverything You Need To Know About Flatteners and Levelers For Coil Processing - Part IVertuokumusAinda não há avaliações
- Smart Meter Verification & ProvingDocumento7 páginasSmart Meter Verification & ProvingdianyvgnAinda não há avaliações
- HAZOP Study Report TemplateDocumento1 páginaHAZOP Study Report TemplateSatria Antariksa RamadhanAinda não há avaliações
- Magnescann Pipetronics Trap DimensionsDocumento20 páginasMagnescann Pipetronics Trap DimensionsChike NwachukwuAinda não há avaliações
- Elster-Instromet M2000 FCDocumento0 páginaElster-Instromet M2000 FCsaid_rahmansyah4750Ainda não há avaliações
- Isolating Spark GapsDocumento1 páginaIsolating Spark GapstyaskartikaAinda não há avaliações
- E545-99 Neutron Image QualityDocumento4 páginasE545-99 Neutron Image QualityaboutdestinyAinda não há avaliações
- PD6662 2010 ComplianceDocumento5 páginasPD6662 2010 Complianceniko67Ainda não há avaliações
- City & Guilds 2392-10Documento1 páginaCity & Guilds 2392-10lautsuAinda não há avaliações
- Ind-X Industrial Dry Chemical SystemsDocumento4 páginasInd-X Industrial Dry Chemical Systemsjorge121071Ainda não há avaliações
- Procedure For Safety Certification and Technical Clearance of Metro Systems (With CS No Upto 3) PDFDocumento58 páginasProcedure For Safety Certification and Technical Clearance of Metro Systems (With CS No Upto 3) PDFMayank SharmaAinda não há avaliações
- 33 Control Relay Protection PhilosophyDocumento3 páginas33 Control Relay Protection PhilosophysashikumarAinda não há avaliações
- Mecon Industries Coil Handling Aug 2020Documento32 páginasMecon Industries Coil Handling Aug 2020tomjordan12321100% (1)
- Egp ReportDocumento109 páginasEgp ReportvyshnapramodAinda não há avaliações
- AccuLoad III-D Operator Reference ManualDocumento120 páginasAccuLoad III-D Operator Reference Manualpablobs100% (1)
- IFIX Database ReferenceDocumento474 páginasIFIX Database Referencechris75726Ainda não há avaliações
- Vpisv3 - Nrjtds17764en-082019Documento4 páginasVpisv3 - Nrjtds17764en-082019XUÂN LONG ĐỖAinda não há avaliações
- 16" MFL-DMR Vers.15.15: ILI Tool Data SheetDocumento3 páginas16" MFL-DMR Vers.15.15: ILI Tool Data SheetJudo HardiantoAinda não há avaliações
- Aws WJ 201804Documento141 páginasAws WJ 201804Jorge perezAinda não há avaliações
- TDW PIGG SpecificationsDocumento157 páginasTDW PIGG SpecificationsKhwanas LuqmanAinda não há avaliações
- Sitras RSC: FeaturesDocumento4 páginasSitras RSC: FeaturesAnonymous m1cSnEavoAinda não há avaliações
- Flame Detector X3301 PDFDocumento2 páginasFlame Detector X3301 PDFbeqsAinda não há avaliações
- Electromagnetic Flowmeter FSM4000: Data SheetDocumento58 páginasElectromagnetic Flowmeter FSM4000: Data SheetCapacitacion TodocatAinda não há avaliações
- NRF 204 Pemex 2012.englishDocumento36 páginasNRF 204 Pemex 2012.englishAlexa HarperAinda não há avaliações
- En 13458 1 2002Documento11 páginasEn 13458 1 2002joaoferreiraprfAinda não há avaliações
- Theory of DislocationsDocumento10 páginasTheory of DislocationsNaveenDarwinAinda não há avaliações
- JCGM - 106 - 2012 (M C 7)Documento14 páginasJCGM - 106 - 2012 (M C 7)Quốc Tuấn ĐặngAinda não há avaliações
- Getting Started With IFIXDocumento146 páginasGetting Started With IFIXFred RackowAinda não há avaliações
- Fire Extinguishing AgentsDocumento43 páginasFire Extinguishing AgentsPratyush PandeyAinda não há avaliações
- Tracerase: Operating and Instruction ManualDocumento16 páginasTracerase: Operating and Instruction ManualKrishnaAinda não há avaliações
- DO8P Datasheet PDFDocumento10 páginasDO8P Datasheet PDFRio YuwandiAinda não há avaliações
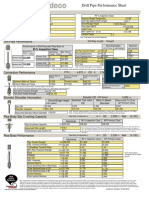
- DrillPipe, 80%, 4.000 OD, 0.330 Wall, IU, G-105.. XT39 (4.875 X 2.563)Documento3 páginasDrillPipe, 80%, 4.000 OD, 0.330 Wall, IU, G-105.. XT39 (4.875 X 2.563)Johann ZabaletaAinda não há avaliações
- Servo Axis Position Resolution Setting On G&L Pic90 Analog Motion Controller of A Rack and Pinion MechanismDocumento9 páginasServo Axis Position Resolution Setting On G&L Pic90 Analog Motion Controller of A Rack and Pinion MechanismeacondeAinda não há avaliações
- Belt Conveyor Sizing ToolDocumento4 páginasBelt Conveyor Sizing ToolBaris YeltekinAinda não há avaliações
- Ch08 - 5Documento49 páginasCh08 - 5abdallah ghannamAinda não há avaliações
- Hydraulic Motors & Pumps, Fixed Displacement, Series F11 - F12 - USDocumento72 páginasHydraulic Motors & Pumps, Fixed Displacement, Series F11 - F12 - USstuart smythAinda não há avaliações
- Caluculation Required For Accelertn TimeDocumento2 páginasCaluculation Required For Accelertn Timech prabuAinda não há avaliações
- System Architecture - Fosber Master Cut Off Esursa EcuadorDocumento1 páginaSystem Architecture - Fosber Master Cut Off Esursa EcuadoreacondeAinda não há avaliações
- System Architecture - Fosber Compact Slitter Scorer Retrofit - Esursa EcuadorDocumento1 páginaSystem Architecture - Fosber Compact Slitter Scorer Retrofit - Esursa EcuadoreacondeAinda não há avaliações
- Champion Envelope Machine Retrofit Project Foroni - BrazilDocumento3 páginasChampion Envelope Machine Retrofit Project Foroni - BrazileacondeAinda não há avaliações
- Servo Axis Position Resolution Setting On G&L Pic90 Analog Motion Controller of A Rack and Pinion MechanismDocumento9 páginasServo Axis Position Resolution Setting On G&L Pic90 Analog Motion Controller of A Rack and Pinion MechanismeacondeAinda não há avaliações
- Science of TuningDocumento8 páginasScience of TuningeacondeAinda não há avaliações
- Senior ServiceNow DeveloperDocumento2 páginasSenior ServiceNow DeveloperConstantin GoaneAinda não há avaliações
- PLC CurriculumDocumento4 páginasPLC CurriculummanisegarAinda não há avaliações
- 403D-15 Industrial Diesel Engine: SpecificationsDocumento5 páginas403D-15 Industrial Diesel Engine: SpecificationsWiratama TambunanAinda não há avaliações
- Custom Business Configuration Apps in SAP S4HANA Cloud, On-Premise, and in SAP BTP ABAP EnvironmentDocumento6 páginasCustom Business Configuration Apps in SAP S4HANA Cloud, On-Premise, and in SAP BTP ABAP Environmentkoizak3Ainda não há avaliações
- Pemanfaatan PLC Dan Visual Basic 6Documento11 páginasPemanfaatan PLC Dan Visual Basic 6mukhsital100% (1)
- 6 Stroke EngineDocumento12 páginas6 Stroke EngineVanam VenkateshAinda não há avaliações
- Robot Cell DesignDocumento25 páginasRobot Cell Designnandkishor joshi100% (1)
- Oop Final ProjectDocumento20 páginasOop Final ProjectSouban JavedAinda não há avaliações
- Project On FTP-CLIENTDocumento37 páginasProject On FTP-CLIENTAkanksha GuptaAinda não há avaliações
- Caml Trading Experiences With Functional Programming On Wall StreetDocumento12 páginasCaml Trading Experiences With Functional Programming On Wall Streethuo siAinda não há avaliações
- Electrical Geopolis 400cc AbsDocumento1 páginaElectrical Geopolis 400cc AbsGeorge BaltzAinda não há avaliações
- Digital Shadows Unmasking Process HollowingDocumento14 páginasDigital Shadows Unmasking Process HollowingAlenuAinda não há avaliações
- Integrated-Vision Datasheet ROB0242EN RevBDocumento2 páginasIntegrated-Vision Datasheet ROB0242EN RevBSwapnil KirveAinda não há avaliações
- Jackson NoahDocumento4 páginasJackson NoahCaio MelloAinda não há avaliações
- Be Electrical 7 Sem PLC and Scada Application P (08) Dec 2016 PDFDocumento3 páginasBe Electrical 7 Sem PLC and Scada Application P (08) Dec 2016 PDFParesh MahajanAinda não há avaliações
- Comparison of Voting Arrangements in SISDocumento5 páginasComparison of Voting Arrangements in SISChelo FishaoAinda não há avaliações
- 260CT Revision NotesDocumento30 páginas260CT Revision NotesSalman Fazal100% (4)
- Sciencedirect SciencedirectDocumento6 páginasSciencedirect SciencedirectThành Trung NguyễnAinda não há avaliações