Você também pode gostar
- A Course of Mathematics for Engineers and ScientistsNo EverandA Course of Mathematics for Engineers and ScientistsAinda não há avaliações
- Dynamic Modeling Using Reference Frame TheoryDocumento8 páginasDynamic Modeling Using Reference Frame TheoryChilambarasan MadhappanAinda não há avaliações
- CH 5Documento52 páginasCH 5phúc nguyễnAinda não há avaliações
- 4 (A) - IM Drives BasicsDocumento27 páginas4 (A) - IM Drives BasicsimdadamuAinda não há avaliações
- Lecture Notes M.Kaliamoorthy AP/EEE, PSNACET 1. Voltage and Torque Equations of A Three Phase Symmetrical Induction MachineDocumento4 páginasLecture Notes M.Kaliamoorthy AP/EEE, PSNACET 1. Voltage and Torque Equations of A Three Phase Symmetrical Induction Machinesameerpatel15770Ainda não há avaliações
- Protecciones AyudaDocumento13 páginasProtecciones AyudaDiego Javier Ponce AndradeAinda não há avaliações
- Equacoes PDFDocumento5 páginasEquacoes PDFGustavo SalgeAinda não há avaliações
- Quantum Numbers and Electron ConfigurationsDocumento16 páginasQuantum Numbers and Electron ConfigurationsMARVIN OTHELLO MELCHOR DAUISAinda não há avaliações
- Modelling of Induction Motor PDFDocumento42 páginasModelling of Induction Motor PDFsureshAinda não há avaliações
- ReportDocumento16 páginasReportMaxx PowerrAinda não há avaliações
- Chapter 9Documento22 páginasChapter 9api-3696297Ainda não há avaliações
- Analytic Design Evaluation of Induction MachinesDocumento43 páginasAnalytic Design Evaluation of Induction MachinesAli HashemiAinda não há avaliações
- A Generalized Two Axes Model of A Squirrel-Cage Induction Motor For A Rotor Fault DiagnosisDocumento16 páginasA Generalized Two Axes Model of A Squirrel-Cage Induction Motor For A Rotor Fault DiagnosisJorge Luis SotoAinda não há avaliações
- Delta RobotDocumento3 páginasDelta RobotVũ Huy HoàngAinda não há avaliações
- Appendix A Space-Phasor Representation of Symmetrical Three-Phase Electric MachinesDocumento13 páginasAppendix A Space-Phasor Representation of Symmetrical Three-Phase Electric MachinesHoàng ChungAinda não há avaliações
- AME 352 Analytical KinematicsDocumento13 páginasAME 352 Analytical Kinematics27AlokKumarAinda não há avaliações
- Classical Harmonic Crystal - 3DDocumento3 páginasClassical Harmonic Crystal - 3DtxtanveerAinda não há avaliações
- Cams and Followers - TangentDocumento5 páginasCams and Followers - TangentIshfaqurAinda não há avaliações
- Lec 6Documento8 páginasLec 6Tailan SarubiAinda não há avaliações
- INDUCTION MOTOR STEADY-STATE MODELDocumento27 páginasINDUCTION MOTOR STEADY-STATE MODELarifulAinda não há avaliações
- Massachusetts Institute of TechnologyDocumento47 páginasMassachusetts Institute of TechnologyAmanAinda não há avaliações
- Section 5Documento16 páginasSection 5api-26021617Ainda não há avaliações
- D-Q Transformation Machine ModelDocumento51 páginasD-Q Transformation Machine Modelwan ismail ibrahimAinda não há avaliações
- Lecture 7: Hydrogen Atom Electron SpinDocumento6 páginasLecture 7: Hydrogen Atom Electron SpinRajesh ChoudharyAinda não há avaliações
- Dynamic Model of Induction MachineDocumento29 páginasDynamic Model of Induction MachinearifulAinda não há avaliações
- Lecture 9 09 11 22Documento32 páginasLecture 9 09 11 22Alkit SharmaAinda não há avaliações
- Assignment 3Documento3 páginasAssignment 3SarthakAinda não há avaliações
- CM Homework 3Documento5 páginasCM Homework 3mazhariAinda não há avaliações
- DQ TransformationDocumento51 páginasDQ Transformationafnan saadiAinda não há avaliações
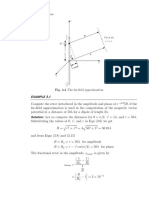
- Chapter 3 Wire Antennas: /R, If TheDocumento18 páginasChapter 3 Wire Antennas: /R, If TheWumi LoyeAinda não há avaliações
- Solutions for Classical Mechanics problemsDocumento10 páginasSolutions for Classical Mechanics problemsazzam almosaAinda não há avaliações
- Electronic Configuration: Prepared By: A. HarrisDocumento42 páginasElectronic Configuration: Prepared By: A. HarrisRoshane RoachAinda não há avaliações
- Meng-Jen Chen, Yu-Chi Wu, Jie-Lu Liao, Jin-Yuan Lin, Hsien-Yin Chiang, and Wen-Liang HuangDocumento10 páginasMeng-Jen Chen, Yu-Chi Wu, Jie-Lu Liao, Jin-Yuan Lin, Hsien-Yin Chiang, and Wen-Liang HuangGeet DeokateAinda não há avaliações
- 1 s2.0 S0166218X01003080 Main PDFDocumento7 páginas1 s2.0 S0166218X01003080 Main PDFLvaAinda não há avaliações
- ATOMIC STRUCTURE 12 JuneDocumento28 páginasATOMIC STRUCTURE 12 JuneSarita SinghAinda não há avaliações
- YoyoDocumento5 páginasYoyoBudiman NasutionAinda não há avaliações
- Prototyping MPC For PMSMDocumento13 páginasPrototyping MPC For PMSMLong Vũ VănAinda não há avaliações
- Quantum Mechanics: The Hydrogen Atom: 12th April 2008Documento5 páginasQuantum Mechanics: The Hydrogen Atom: 12th April 2008TIMOTHY JAMESONAinda não há avaliações
- Stator Inter Turn Fault Detection o PDFDocumento14 páginasStator Inter Turn Fault Detection o PDFsivaramkriAinda não há avaliações
- Search PDFDocumento17 páginasSearch PDFmamata naikAinda não há avaliações
- hw2 SolDocumento8 páginashw2 SolSiti Nur HalizahAinda não há avaliações
- Ionization Energy and Configuration 3Documento48 páginasIonization Energy and Configuration 3Mr. CrustAinda não há avaliações
- CHM142 ELECTRONIC CONFIGURATIONDocumento7 páginasCHM142 ELECTRONIC CONFIGURATIONSyafiyatulMunawarahAinda não há avaliações
- homework3asolDocumento6 páginashomework3asolirqudratAinda não há avaliações
- Alpert 1993Documento22 páginasAlpert 1993Julee ShahniAinda não há avaliações
- OdometryDocumento4 páginasOdometryapi-495347003Ainda não há avaliações
- Accepted For Publication in American Journal of Physics On August 12, 2011Documento8 páginasAccepted For Publication in American Journal of Physics On August 12, 2011Hichem AbAinda não há avaliações
- Week 3 Dimensional AnalysisDocumento19 páginasWeek 3 Dimensional AnalysisRenzAinda não há avaliações
- Lec 6Documento7 páginasLec 6semabayAinda não há avaliações
- EEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttDocumento16 páginasEEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttMohd Mohsin KhanAinda não há avaliações
- Sol 04Documento3 páginasSol 04kirk putmanAinda não há avaliações
- Lec 7Documento5 páginasLec 7prakash mishraAinda não há avaliações
- Some Problems and Solutions - Chapter 3 FWDocumento6 páginasSome Problems and Solutions - Chapter 3 FWעוז אושריAinda não há avaliações
- Chaotic Behaviour of Atomic Energy LevelsDocumento7 páginasChaotic Behaviour of Atomic Energy LevelsDele AdigunAinda não há avaliações
- Math ModuleDocumento158 páginasMath ModuleAryan BhaseinAinda não há avaliações
- MO Lecture Course-2 PDFDocumento20 páginasMO Lecture Course-2 PDFaneeshssaAinda não há avaliações
- Semiconductor PhotonicsDocumento30 páginasSemiconductor PhotonicswuasamomAinda não há avaliações
- Machine Modeling ExplainedDocumento7 páginasMachine Modeling Explainedahmed s. NourAinda não há avaliações
- Dynamic PMSM ModellingDocumento24 páginasDynamic PMSM Modellingdirekap280Ainda não há avaliações
- Spin-Orbit Interaction: Understanding the Fine StructureDocumento23 páginasSpin-Orbit Interaction: Understanding the Fine Structureafaf_physAinda não há avaliações
- Efficiency and Regulation of Single-Phase TransformerDocumento11 páginasEfficiency and Regulation of Single-Phase Transformersameerpatel15770Ainda não há avaliações
- Magnetic HysteresisDocumento6 páginasMagnetic Hysteresissameerpatel15770Ainda não há avaliações
- Load Test On DC Shunt Motor: Expt. No: DateDocumento7 páginasLoad Test On DC Shunt Motor: Expt. No: Datesameerpatel15770Ainda não há avaliações
- Open Circuit & Short Open Circuit & Short Circuit Test Single Phase Transformer Tests of RmerDocumento14 páginasOpen Circuit & Short Open Circuit & Short Circuit Test Single Phase Transformer Tests of Rmersameerpatel15770Ainda não há avaliações
- Exp-1 - Post Experiment QuestionsDocumento1 páginaExp-1 - Post Experiment Questionssameerpatel15770Ainda não há avaliações
- Design of Cooling SystemDocumento5 páginasDesign of Cooling Systemsameerpatel15770100% (1)
- Transformer 4Documento87 páginasTransformer 4sameerpatel15770Ainda não há avaliações
- Experiment-1 Speed Control of DC Motor Using Matlab SimulinkDocumento4 páginasExperiment-1 Speed Control of DC Motor Using Matlab Simulinksameerpatel15770Ainda não há avaliações
- Transformer 4Documento87 páginasTransformer 4sameerpatel15770Ainda não há avaliações
- Gujarat Technological UniversityDocumento1 páginaGujarat Technological Universitysiddharth pandyaAinda não há avaliações
- Transformer 1Documento46 páginasTransformer 1sameerpatel15770Ainda não há avaliações
- Exp-1 Magnetic HysterisisDocumento11 páginasExp-1 Magnetic Hysterisissameerpatel15770Ainda não há avaliações
- Chapter 4-TransformerDocumento82 páginasChapter 4-Transformerteza maruAinda não há avaliações
- Transformer 1Documento46 páginasTransformer 1sameerpatel15770Ainda não há avaliações
- Gujarat Technological UniversityDocumento1 páginaGujarat Technological Universitysiddharth pandyaAinda não há avaliações
- Major factors in electrical machine designDocumento24 páginasMajor factors in electrical machine designsameerpatel1577050% (2)
- Design of Electrical MachinesDocumento142 páginasDesign of Electrical MachinesVXFVYAinda não há avaliações
- Magnetic HysteresisDocumento6 páginasMagnetic Hysteresissameerpatel15770Ainda não há avaliações
- Design of Electrical MachinesDocumento142 páginasDesign of Electrical MachinesVXFVYAinda não há avaliações
- Electrical Machine Design - See1304: Unit - IDocumento61 páginasElectrical Machine Design - See1304: Unit - Isameerpatel15770Ainda não há avaliações
- Exp-1 Magnetic HysterisisDocumento11 páginasExp-1 Magnetic Hysterisissameerpatel15770Ainda não há avaliações
- Exp-1 To Get The Hysteresis Loop of Ferromagnetic Material.Documento6 páginasExp-1 To Get The Hysteresis Loop of Ferromagnetic Material.sameerpatel15770Ainda não há avaliações
- General Design AspectsDocumento14 páginasGeneral Design Aspectssameerpatel15770Ainda não há avaliações
- 06567399Documento6 páginas06567399MateoAinda não há avaliações
- Synchronous Machines Synchronous Machines: OutlineDocumento31 páginasSynchronous Machines Synchronous Machines: Outlinesameerpatel15770Ainda não há avaliações
- Introduction to Switched Reluctance Motor DesignDocumento12 páginasIntroduction to Switched Reluctance Motor Designsameerpatel15770Ainda não há avaliações
- Group Discussion ETC 3130004Documento15 páginasGroup Discussion ETC 3130004sameerpatel15770Ainda não há avaliações
- Group Discussion ETC 3130004Documento15 páginasGroup Discussion ETC 3130004sameerpatel15770Ainda não há avaliações
- Formal Presentations - ETC - 3130004Documento19 páginasFormal Presentations - ETC - 3130004sameerpatel15770Ainda não há avaliações
- Major Considerations in Electrical Machine Design Design of MachinesDocumento53 páginasMajor Considerations in Electrical Machine Design Design of MachinesHarsh Vardhan0% (1)
- Medisys Corp.: The Intenscare Product Development Team: Submitted By: Vanila Mehta P40049Documento2 páginasMedisys Corp.: The Intenscare Product Development Team: Submitted By: Vanila Mehta P40049Amit DalalAinda não há avaliações
- Pamela J. Eyerdam-Using Internet Primary Sources To Teach Critical Thinking Skills in Visual Arts (Greenwood Professional Guides in School Librarianship) - Libraries Unlimited (2003)Documento350 páginasPamela J. Eyerdam-Using Internet Primary Sources To Teach Critical Thinking Skills in Visual Arts (Greenwood Professional Guides in School Librarianship) - Libraries Unlimited (2003)Tuấn ĐặngAinda não há avaliações
- ASSIGNMENT - Rousseau's ConfessionsDocumento2 páginasASSIGNMENT - Rousseau's Confessionsridvikaarora16Ainda não há avaliações
- PRINCIPLES OF FIELD GEOLOGY FIELDWORKDocumento8 páginasPRINCIPLES OF FIELD GEOLOGY FIELDWORKwarrior_2008Ainda não há avaliações
- Group5 Affective Social Experiences PrintDocumento11 páginasGroup5 Affective Social Experiences PrintshrutiAinda não há avaliações
- Bengali Food As Mimesis in Calcutta and DhakaDocumento25 páginasBengali Food As Mimesis in Calcutta and DhakaShinjini Sircar SenguptaAinda não há avaliações
- Instant Download Business Ethics Ethical Decision Making and Cases 11Th Edition Ferrell Test Bank PDF ScribdDocumento11 páginasInstant Download Business Ethics Ethical Decision Making and Cases 11Th Edition Ferrell Test Bank PDF ScribdLance CorreaAinda não há avaliações
- Shinde R.Documento8 páginasShinde R.rutuja shindeAinda não há avaliações
- Sermon Notes: "Restore Us To Yourself, O Lord" (Lamentations 5)Documento3 páginasSermon Notes: "Restore Us To Yourself, O Lord" (Lamentations 5)NewCityChurchCalgaryAinda não há avaliações
- Modern Business TemplatesDocumento21 páginasModern Business TemplatesAntonio OtazúAinda não há avaliações
- Propositional Logic and Set Theory Sample ExamDocumento3 páginasPropositional Logic and Set Theory Sample Examzerihun MekoyaAinda não há avaliações
- Song of Songs of SolomonDocumento103 páginasSong of Songs of SolomonAndré Rademacher100% (3)
- Wallace Stevens and Martin Heidegger: Poetry As Appropriative ProximityDocumento199 páginasWallace Stevens and Martin Heidegger: Poetry As Appropriative ProximityIsac AzoulayAinda não há avaliações
- Iim Recommendation LetterDocumento2 páginasIim Recommendation LetterSuman PoudelAinda não há avaliações
- Sirdamma TheroDocumento15 páginasSirdamma TheroSiri Sadaham MonastryAinda não há avaliações
- Kohlberg Moral Stages and MoralizationDocumento12 páginasKohlberg Moral Stages and MoralizationJoy Sib-aten100% (1)
- EnglishElective SQPDocumento11 páginasEnglishElective SQPmansoorbariAinda não há avaliações
- Deep Ecology Debate on Humans' Environmental RoleDocumento8 páginasDeep Ecology Debate on Humans' Environmental RoleVidushi ThapliyalAinda não há avaliações
- 5th Sem Strategic Management Notes by Yatharth ChauhanDocumento63 páginas5th Sem Strategic Management Notes by Yatharth ChauhanVikas Prajapati100% (5)
- People and Participation FinalDocumento61 páginasPeople and Participation Finalgilbertociro100% (2)
- Letterhead of OrganizationDocumento3 páginasLetterhead of OrganizationeyoAinda não há avaliações
- Beckman - 1996 - The Parsing of ProsodyDocumento53 páginasBeckman - 1996 - The Parsing of ProsodyNathacia Lucena RibeiroAinda não há avaliações
- Persian 3 Minute Kobo AudiobookDocumento194 páginasPersian 3 Minute Kobo AudiobookslojnotakAinda não há avaliações
- Safety Induction Post Test Answer Sheet: Name: Nexus: Score: Instructor: DateDocumento1 páginaSafety Induction Post Test Answer Sheet: Name: Nexus: Score: Instructor: DateJunard Lu HapAinda não há avaliações
- Tesol Video QuestionsDocumento3 páginasTesol Video QuestionsŁéī ŸáhAinda não há avaliações
- PhilosophyDocumento15 páginasPhilosophyArnab Kumar MukhopadhyayAinda não há avaliações
- Laila Majnoon and IndiaDocumento29 páginasLaila Majnoon and IndiaPunnakayamAinda não há avaliações
- Diagnostic Test Grade 8Documento6 páginasDiagnostic Test Grade 8Charlyne Mari FloresAinda não há avaliações
- Of Mice and Men Social Capital Lesson PlanDocumento7 páginasOf Mice and Men Social Capital Lesson Planapi-318023993Ainda não há avaliações
- Stockhausen Listening Guide - Gesang Der JunglingeDocumento7 páginasStockhausen Listening Guide - Gesang Der JunglingetoddjdAinda não há avaliações
- Can't Hurt Me by David Goggins - Book Summary: Master Your Mind and Defy the OddsNo EverandCan't Hurt Me by David Goggins - Book Summary: Master Your Mind and Defy the OddsNota: 4.5 de 5 estrelas4.5/5 (382)
- The Whole-Brain Child by Daniel J. Siegel, M.D., and Tina Payne Bryson, PhD. - Book Summary: 12 Revolutionary Strategies to Nurture Your Child’s Developing MindNo EverandThe Whole-Brain Child by Daniel J. Siegel, M.D., and Tina Payne Bryson, PhD. - Book Summary: 12 Revolutionary Strategies to Nurture Your Child’s Developing MindNota: 4.5 de 5 estrelas4.5/5 (57)
- Summary: Atomic Habits by James Clear: An Easy & Proven Way to Build Good Habits & Break Bad OnesNo EverandSummary: Atomic Habits by James Clear: An Easy & Proven Way to Build Good Habits & Break Bad OnesNota: 5 de 5 estrelas5/5 (1631)
- Designing Your Life by Bill Burnett, Dave Evans - Book Summary: How to Build a Well-Lived, Joyful LifeNo EverandDesigning Your Life by Bill Burnett, Dave Evans - Book Summary: How to Build a Well-Lived, Joyful LifeNota: 4.5 de 5 estrelas4.5/5 (61)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningNo EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningNota: 4.5 de 5 estrelas4.5/5 (55)
- The One Thing: The Surprisingly Simple Truth Behind Extraordinary ResultsNo EverandThe One Thing: The Surprisingly Simple Truth Behind Extraordinary ResultsNota: 4.5 de 5 estrelas4.5/5 (708)
- Summary of The Anxious Generation by Jonathan Haidt: How the Great Rewiring of Childhood Is Causing an Epidemic of Mental IllnessNo EverandSummary of The Anxious Generation by Jonathan Haidt: How the Great Rewiring of Childhood Is Causing an Epidemic of Mental IllnessAinda não há avaliações
- How To Win Friends and Influence People by Dale Carnegie - Book SummaryNo EverandHow To Win Friends and Influence People by Dale Carnegie - Book SummaryNota: 5 de 5 estrelas5/5 (555)
- Mindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessNo EverandMindset by Carol S. Dweck - Book Summary: The New Psychology of SuccessNota: 4.5 de 5 estrelas4.5/5 (327)
- Summary of Supercommunicators by Charles Duhigg: How to Unlock the Secret Language of ConnectionNo EverandSummary of Supercommunicators by Charles Duhigg: How to Unlock the Secret Language of ConnectionAinda não há avaliações
- The Compound Effect by Darren Hardy - Book Summary: Jumpstart Your Income, Your Life, Your SuccessNo EverandThe Compound Effect by Darren Hardy - Book Summary: Jumpstart Your Income, Your Life, Your SuccessNota: 5 de 5 estrelas5/5 (456)
- The Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaNo EverandThe Body Keeps the Score by Bessel Van der Kolk, M.D. - Book Summary: Brain, Mind, and Body in the Healing of TraumaNota: 4.5 de 5 estrelas4.5/5 (266)
- Summary of 12 Rules for Life: An Antidote to ChaosNo EverandSummary of 12 Rules for Life: An Antidote to ChaosNota: 4.5 de 5 estrelas4.5/5 (294)
- The War of Art by Steven Pressfield - Book Summary: Break Through The Blocks And Win Your Inner Creative BattlesNo EverandThe War of Art by Steven Pressfield - Book Summary: Break Through The Blocks And Win Your Inner Creative BattlesNota: 4.5 de 5 estrelas4.5/5 (273)
- SUMMARY: So Good They Can't Ignore You (UNOFFICIAL SUMMARY: Lesson from Cal Newport)No EverandSUMMARY: So Good They Can't Ignore You (UNOFFICIAL SUMMARY: Lesson from Cal Newport)Nota: 4.5 de 5 estrelas4.5/5 (14)
- Summary of Slow Productivity by Cal Newport: The Lost Art of Accomplishment Without BurnoutNo EverandSummary of Slow Productivity by Cal Newport: The Lost Art of Accomplishment Without BurnoutNota: 1 de 5 estrelas1/5 (1)
- Book Summary of The Subtle Art of Not Giving a F*ck by Mark MansonNo EverandBook Summary of The Subtle Art of Not Giving a F*ck by Mark MansonNota: 4.5 de 5 estrelas4.5/5 (577)
- Summary of Bad Therapy by Abigail Shrier: Why the Kids Aren't Growing UpNo EverandSummary of Bad Therapy by Abigail Shrier: Why the Kids Aren't Growing UpNota: 5 de 5 estrelas5/5 (1)
- Summary of The Galveston Diet by Mary Claire Haver MD: The Doctor-Developed, Patient-Proven Plan to Burn Fat and Tame Your Hormonal SymptomsNo EverandSummary of The Galveston Diet by Mary Claire Haver MD: The Doctor-Developed, Patient-Proven Plan to Burn Fat and Tame Your Hormonal SymptomsAinda não há avaliações
- Essentialism by Greg McKeown - Book Summary: The Disciplined Pursuit of LessNo EverandEssentialism by Greg McKeown - Book Summary: The Disciplined Pursuit of LessNota: 4.5 de 5 estrelas4.5/5 (187)
- Summary of Atomic Habits by James ClearNo EverandSummary of Atomic Habits by James ClearNota: 5 de 5 estrelas5/5 (168)
- Crucial Conversations by Kerry Patterson, Joseph Grenny, Ron McMillan, and Al Switzler - Book Summary: Tools for Talking When Stakes Are HighNo EverandCrucial Conversations by Kerry Patterson, Joseph Grenny, Ron McMillan, and Al Switzler - Book Summary: Tools for Talking When Stakes Are HighNota: 4.5 de 5 estrelas4.5/5 (97)
- The 5 Second Rule by Mel Robbins - Book Summary: Transform Your Life, Work, and Confidence with Everyday CourageNo EverandThe 5 Second Rule by Mel Robbins - Book Summary: Transform Your Life, Work, and Confidence with Everyday CourageNota: 4.5 de 5 estrelas4.5/5 (328)
- Summary of Million Dollar Weekend by Noah Kagan and Tahl Raz: The Surprisingly Simple Way to Launch a 7-Figure Business in 48 HoursNo EverandSummary of Million Dollar Weekend by Noah Kagan and Tahl Raz: The Surprisingly Simple Way to Launch a 7-Figure Business in 48 HoursAinda não há avaliações
- Steal Like an Artist by Austin Kleon - Book Summary: 10 Things Nobody Told You About Being CreativeNo EverandSteal Like an Artist by Austin Kleon - Book Summary: 10 Things Nobody Told You About Being CreativeNota: 4.5 de 5 estrelas4.5/5 (128)
- Do the Work: The Official Unrepentant, Ass-Kicking, No-Kidding, Change-Your-Life Sidekick to Unfu*k YourselfNo EverandDo the Work: The Official Unrepentant, Ass-Kicking, No-Kidding, Change-Your-Life Sidekick to Unfu*k YourselfNota: 4.5 de 5 estrelas4.5/5 (506)
- Summary, Analysis, and Review of Cal Newport's Deep WorkNo EverandSummary, Analysis, and Review of Cal Newport's Deep WorkNota: 3.5 de 5 estrelas3.5/5 (18)
- Skin in the Game by Nassim Nicholas Taleb - Book Summary: Hidden Asymmetries in Daily LifeNo EverandSkin in the Game by Nassim Nicholas Taleb - Book Summary: Hidden Asymmetries in Daily LifeNota: 4.5 de 5 estrelas4.5/5 (78)