Você também pode gostar
- Motores Eletricos - 14806Documento11 páginasMotores Eletricos - 14806Pedro JuniorAinda não há avaliações
- Euler e Runge KuttaDocumento7 páginasEuler e Runge KuttaRodrigo PanuzzioAinda não há avaliações
- ValoresDocumento4 páginasValoresPedro JuniorAinda não há avaliações
- T Cnicas de Modelagem e Controle de Conversores Est TicosDocumento89 páginasT Cnicas de Modelagem e Controle de Conversores Est TicosjadsondossantosdasilAinda não há avaliações
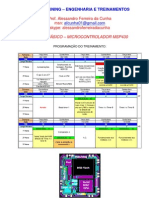
- MSP430 treinamento engenhariaDocumento54 páginasMSP430 treinamento engenhariabrauptakAinda não há avaliações
- Configuração UART MSP430Documento2 páginasConfiguração UART MSP430Pedro JuniorAinda não há avaliações
- Para Untitled1Documento1 páginaPara Untitled1Pedro JuniorAinda não há avaliações
- Bombas CentrifugasDocumento2 páginasBombas CentrifugasPedro JuniorAinda não há avaliações
- 1 AP de DispositivosDocumento19 páginas1 AP de DispositivosPedro JuniorAinda não há avaliações
- Configuração UART MSP430Documento2 páginasConfiguração UART MSP430Pedro JuniorAinda não há avaliações
- Como Eu SeiDocumento1 páginaComo Eu SeiPedro JuniorAinda não há avaliações
- MSP430 Timer1Documento10 páginasMSP430 Timer1Pedro JuniorAinda não há avaliações
- Configuração UART MSP430Documento2 páginasConfiguração UART MSP430Pedro JuniorAinda não há avaliações
- CalNum101 AP1Documento1 páginaCalNum101 AP1Pedro JuniorAinda não há avaliações
- Configuração UART MSP430Documento2 páginasConfiguração UART MSP430Pedro JuniorAinda não há avaliações
- CaceresDelgadoAdriana MDocumento117 páginasCaceresDelgadoAdriana MPedro JuniorAinda não há avaliações
- Aproximação de funções usando redes neurais no MATLABDocumento28 páginasAproximação de funções usando redes neurais no MATLABWilson AraújoAinda não há avaliações
- Artigo HAVADocumento6 páginasArtigo HAVAPedro JuniorAinda não há avaliações
- 281761-Nota de Aula MMIDocumento8 páginas281761-Nota de Aula MMIPedro JuniorAinda não há avaliações
- Servo MotorDocumento1 páginaServo MotorPedro JuniorAinda não há avaliações
- Artigo Do Prof EloyDocumento8 páginasArtigo Do Prof EloyPedro JuniorAinda não há avaliações
- Guia de FONTE DC e Confecção de PCBDocumento11 páginasGuia de FONTE DC e Confecção de PCBPedro JuniorAinda não há avaliações
- Aula 6 - Cálculo Do EstaquemanetoDocumento41 páginasAula 6 - Cálculo Do EstaquemanetoMATHEUS SARAIVA TAVARESAinda não há avaliações
- Relatório Cidade MatarazzoDocumento4 páginasRelatório Cidade MatarazzoAlice Schiavinato de SouzaAinda não há avaliações
- Sistemas de propulsão navalDocumento104 páginasSistemas de propulsão navalFelipe Miranda Nassar100% (5)
- Apostila PG II 1400Documento40 páginasApostila PG II 1400Tateto Omulu88% (8)
- 7 - Parametros de Linhas - Resistencia - Feixes de Condutores - Trifasicos em ParaleloDocumento31 páginas7 - Parametros de Linhas - Resistencia - Feixes de Condutores - Trifasicos em ParaleloHelder CruzAinda não há avaliações
- Prova 1EB 2013Documento2 páginasProva 1EB 2013José Carlos SimõesAinda não há avaliações
- Shot Penninng Tratamento...Documento3 páginasShot Penninng Tratamento...Carlos Augusto LancellottiAinda não há avaliações
- Estudo de Perfis de Torres em Túnel de VentoDocumento152 páginasEstudo de Perfis de Torres em Túnel de VentoLucas de MedeirosAinda não há avaliações
- Especificação Funcional CompletaDocumento15 páginasEspecificação Funcional CompletadaborgesAinda não há avaliações
- Como se tornar peritoDocumento19 páginasComo se tornar peritoRenata Verissimo Cardoso LimaAinda não há avaliações
- Planilha de Levantamento QuantitativoDocumento29 páginasPlanilha de Levantamento QuantitativoGisele Cristina RodriguesAinda não há avaliações
- 1 - SZN PPC Pos Logistica - Versao Final CTPDocumento62 páginas1 - SZN PPC Pos Logistica - Versao Final CTPRubens PericlesAinda não há avaliações
- Protecção Das Instalações EléctricasDocumento22 páginasProtecção Das Instalações EléctricasFrancisco SantosAinda não há avaliações
- Aula 06 Tenso Admissvel ProjetoDocumento19 páginasAula 06 Tenso Admissvel ProjetoLucas FerreiraAinda não há avaliações
- Manual - ER 250 300 350 400 450 500Documento20 páginasManual - ER 250 300 350 400 450 500Suelen Santos100% (1)
- Peças e componentes para caminhões, carretas e 3o eixoDocumento18 páginasPeças e componentes para caminhões, carretas e 3o eixoluizAinda não há avaliações
- Manual de Projeto Steel House Maio2011Documento36 páginasManual de Projeto Steel House Maio2011Anonymous J6Ay5Mp2M100% (1)
- Estruturas gritam alerta sobre efeito RüschDocumento2 páginasEstruturas gritam alerta sobre efeito RüschManoel XavierAinda não há avaliações
- Resistência compressão concretos PET agregadosDocumento15 páginasResistência compressão concretos PET agregadosAna CruzAinda não há avaliações
- Análise preliminar de riscos em terplenagemDocumento11 páginasAnálise preliminar de riscos em terplenagemDiêgo Lopes50% (2)
- Fadiga Fenomeno 05-03-2015Documento109 páginasFadiga Fenomeno 05-03-2015IzabelaBatistaAinda não há avaliações
- Aparelhagem Elétrica Classificação e CaracterísticasDocumento10 páginasAparelhagem Elétrica Classificação e CaracterísticasAmerco TivaneAinda não há avaliações
- Atuador Realtek LinearDocumento36 páginasAtuador Realtek LinearJúnior PradoAinda não há avaliações
- Desbloqueio Xbox360slim Drive 0225Documento3 páginasDesbloqueio Xbox360slim Drive 0225admilson eliasAinda não há avaliações
- Manual Filtro FUSATI 2018Documento4 páginasManual Filtro FUSATI 2018Raphael RodriguesAinda não há avaliações
- Wicanders - Tabela de Preços - 2015Documento56 páginasWicanders - Tabela de Preços - 2015Hugo0% (1)
- JCL If and ElseDocumento25 páginasJCL If and ElseVictor HugoAinda não há avaliações
- DAF XF105 FTT especificaçõesDocumento2 páginasDAF XF105 FTT especificaçõesCauehRebello100% (1)
- Cap.1 - EFConcreto - Fundações Rasas - V13 - UnilinsDocumento151 páginasCap.1 - EFConcreto - Fundações Rasas - V13 - UnilinsVictor Gandara Bettoni100% (2)
- Manutenção de equipamento de ar condicionadoDocumento1 páginaManutenção de equipamento de ar condicionadoAnonymous FZs3yBHh7Ainda não há avaliações