Você também pode gostar
- ACL Kinematic BasisDocumento5 páginasACL Kinematic BasisMahdicheraghiAinda não há avaliações
- Escamilla Et Al. Biomechanics of The Knee During Closed Kinetic Chain and Open Kinetic Chain ExercisesDocumento14 páginasEscamilla Et Al. Biomechanics of The Knee During Closed Kinetic Chain and Open Kinetic Chain ExercisesMariano RosalesAinda não há avaliações
- Biomechanics of The Knee During Closed Kinetic Chain and Open KineticDocumento17 páginasBiomechanics of The Knee During Closed Kinetic Chain and Open KineticArmando NetoAinda não há avaliações
- Navacchia 2019Documento15 páginasNavacchia 2019PabloAñonAinda não há avaliações
- Jpts 26 855Documento2 páginasJpts 26 855Yoga MatiinuAinda não há avaliações
- Effect of Knee Position On Hip and Knee Torques During The Barbell SquatDocumento5 páginasEffect of Knee Position On Hip and Knee Torques During The Barbell SquatMattAinda não há avaliações
- The Effect of Thoracic Spine MobilizationDocumento4 páginasThe Effect of Thoracic Spine MobilizationEric SimasAinda não há avaliações
- Comparison Electromyographic Activit During Open: ClosedDocumento10 páginasComparison Electromyographic Activit During Open: ClosedFernando WagnerAinda não há avaliações
- Effect of Knee Position On Hip and Knee Torques During The Barbell SquatDocumento5 páginasEffect of Knee Position On Hip and Knee Torques During The Barbell SquatNicolás ManonniAinda não há avaliações
- Effects of Exoskeletal Stiffness in Parallel With The Knee On The Motion of The Human Body Center of Mass During WalkingDocumento8 páginasEffects of Exoskeletal Stiffness in Parallel With The Knee On The Motion of The Human Body Center of Mass During WalkingshoaibAinda não há avaliações
- Current Concepts: Biomechanics of Knee LigamentsDocumento11 páginasCurrent Concepts: Biomechanics of Knee LigamentsBarbaraAndradeQuirozAinda não há avaliações
- Análise EMG de Músculos Das Extremidades Inferiores em Três Diferentes Exercícios de AgachamentoDocumento6 páginasAnálise EMG de Músculos Das Extremidades Inferiores em Três Diferentes Exercícios de AgachamentoSheilani MartinsAinda não há avaliações
- Activation and Torque Deficits in ACL-Reconstructed Patients 4 Months Post-OperativeDocumento15 páginasActivation and Torque Deficits in ACL-Reconstructed Patients 4 Months Post-OperativeEurovision RSAinda não há avaliações
- The Knee: Sean F. Scanlan, Joseph P. Donahue, Thomas P. AndriacchiDocumento6 páginasThe Knee: Sean F. Scanlan, Joseph P. Donahue, Thomas P. Andriacchihectorlekepi92Ainda não há avaliações
- Effect of Hamstring Emphasized Resistance Training On H-Q Strength RatioDocumento7 páginasEffect of Hamstring Emphasized Resistance Training On H-Q Strength RatioRaja Nurul JannatAinda não há avaliações
- Unstable Surface Improves Quadriceps:Hamstring Co-Contraction For Anterior Cruciate Ligament Injury Prevention StrategiesDocumento6 páginasUnstable Surface Improves Quadriceps:Hamstring Co-Contraction For Anterior Cruciate Ligament Injury Prevention StrategiesNelsonRodríguezDeLeónAinda não há avaliações
- Glut MedMaxDocumento12 páginasGlut MedMaxColm CoakleyAinda não há avaliações
- International Journal of Industrial Ergonomics: Sangeun Jin, Gary A. MirkaDocumento5 páginasInternational Journal of Industrial Ergonomics: Sangeun Jin, Gary A. MirkaAlexiAinda não há avaliações
- The Biomechanics of Squat DepthDocumento4 páginasThe Biomechanics of Squat DepthaldoAinda não há avaliações
- Effect of Elastic Scapular Taping On Shoulder and Spine Kinematics in Adolescents With Idiopathic ScoliosisDocumento11 páginasEffect of Elastic Scapular Taping On Shoulder and Spine Kinematics in Adolescents With Idiopathic ScoliosisлеонидAinda não há avaliações
- 4 Jung 2011Documento7 páginas4 Jung 2011Matias Santis OlivaresAinda não há avaliações
- Preliminary Evaluation of A Powered Lower Limb Orthosis To Aid Walking in Paraplegic IndividualsDocumento8 páginasPreliminary Evaluation of A Powered Lower Limb Orthosis To Aid Walking in Paraplegic IndividualsCarmen Cuerdo del RíoAinda não há avaliações
- Kinetic Chain ArticleDocumento9 páginasKinetic Chain Articler.zaczek93Ainda não há avaliações
- Bio Mechanics of Knee LigamentsDocumento11 páginasBio Mechanics of Knee LigamentsSuresh Katakam100% (1)
- Sms 13770Documento29 páginasSms 13770Peio KominoAinda não há avaliações
- 2004 Mcgill Ab Bracing ArtcileDocumento12 páginas2004 Mcgill Ab Bracing ArtcileDemetriusAinda não há avaliações
- Lower Extremity Biomechanics During A Regular And.15Documento9 páginasLower Extremity Biomechanics During A Regular And.15FaustAinda não há avaliações
- ABiomechanical Comparisonof Different Vertical JumpDocumento10 páginasABiomechanical Comparisonof Different Vertical JumpVíctor TarínAinda não há avaliações
- 1 s2.0 S0966636221001338 MainDocumento7 páginas1 s2.0 S0966636221001338 MainLiesapriyantiAinda não há avaliações
- Effects of Running Retraining After Knee Anterior Cruciate Ligament ReconstructionDocumento12 páginasEffects of Running Retraining After Knee Anterior Cruciate Ligament Reconstructionguillaume BartheAinda não há avaliações
- Biomechanics of The Knee During Closed Kinetic Chain and Open Kinetic Chain ExercisesDocumento15 páginasBiomechanics of The Knee During Closed Kinetic Chain and Open Kinetic Chain ExercisesAndresLeivaMckendrickAinda não há avaliações
- 2004 ACSM Core Stability Measures As Risk Factors For Lower Extremity Injury in Athletes PDFDocumento9 páginas2004 ACSM Core Stability Measures As Risk Factors For Lower Extremity Injury in Athletes PDFYunus YataganAinda não há avaliações
- Biomechanics of Front and Back Squat Exercises: Home Search Collections Journals About Contact Us My IopscienceDocumento9 páginasBiomechanics of Front and Back Squat Exercises: Home Search Collections Journals About Contact Us My IopsciencealdoAinda não há avaliações
- Gait & Posture: SciencedirectDocumento6 páginasGait & Posture: SciencedirectAhmad Azmi NasutionAinda não há avaliações
- Journal of Biomechanics: Josh R. Baxter, Todd J. Hullfish, Wen ChaoDocumento5 páginasJournal of Biomechanics: Josh R. Baxter, Todd J. Hullfish, Wen ChaoEma.diazAinda não há avaliações
- The Effects of Prosthetic Ankle Dorsiflexion and Energy Return On Below-Knee Amputee Leg LoadingDocumento6 páginasThe Effects of Prosthetic Ankle Dorsiflexion and Energy Return On Below-Knee Amputee Leg LoadingAbid YusufAinda não há avaliações
- Ipsilateral Hip Abductor Weakness After Inversion Ankle SprainDocumento5 páginasIpsilateral Hip Abductor Weakness After Inversion Ankle SprainZmajAinda não há avaliações
- Training Affects Knee Kinematics and Kinetics in Cutting Maneuvers in SportDocumento10 páginasTraining Affects Knee Kinematics and Kinetics in Cutting Maneuvers in SportSebastian BejaranoAinda não há avaliações
- Review-THE ROLE OF KNEE BRACES AFTER ACL LESIONDocumento10 páginasReview-THE ROLE OF KNEE BRACES AFTER ACL LESIONAndreea TudoseAinda não há avaliações
- Effect of Foot Rotation On Knee Kinetics and Hamstring Activation in Older Adults With and Without Signs of Knee OsteoarthritisDocumento8 páginasEffect of Foot Rotation On Knee Kinetics and Hamstring Activation in Older Adults With and Without Signs of Knee OsteoarthritisDaniel FreireAinda não há avaliações
- The Effect of Different Decline Angles On The Biomechanics of Double Limb Squats and The Implications To Clinical and Training PracticeDocumento15 páginasThe Effect of Different Decline Angles On The Biomechanics of Double Limb Squats and The Implications To Clinical and Training Practicesebastian floresAinda não há avaliações
- 2016 Influence of Scapular Position On The CORE Musculature Activation in The Prone Plank ExerciseDocumento23 páginas2016 Influence of Scapular Position On The CORE Musculature Activation in The Prone Plank ExerciseFrancisco Antonó Castro WeithAinda não há avaliações
- In Vivo Knee Moments and Shear After Total Knee ArthroplastyDocumento7 páginasIn Vivo Knee Moments and Shear After Total Knee ArthroplastyJobin VargheseAinda não há avaliações
- Cruciate Ligament Forces in The Human Knee During Rehabilitation ExercisesDocumento12 páginasCruciate Ligament Forces in The Human Knee During Rehabilitation ExercisesQuiroprácticaParaTodosAinda não há avaliações
- J Jelekin 2014 06 002 PDFDocumento38 páginasJ Jelekin 2014 06 002 PDFRommel AndresAinda não há avaliações
- Accepted ManuscriptDocumento40 páginasAccepted ManuscriptDaniel CarcamoAinda não há avaliações
- Edrm 600 Research PaperDocumento16 páginasEdrm 600 Research Paperapi-334387919Ainda não há avaliações
- Open vs. Closed Kinetic Chain Exercises For ACL Rehab 2Documento7 páginasOpen vs. Closed Kinetic Chain Exercises For ACL Rehab 2Andrés MardonesAinda não há avaliações
- The in Uence of Deceleration Forces On ACL Strain During Single-Leg Landing: A Simulation StudyDocumento8 páginasThe in Uence of Deceleration Forces On ACL Strain During Single-Leg Landing: A Simulation Studysogol5506367Ainda não há avaliações
- The Knee: S.L. Keays, M. Sayers, D.B. Mellifont, C. RichardsonDocumento10 páginasThe Knee: S.L. Keays, M. Sayers, D.B. Mellifont, C. Richardsonakfis ukiAinda não há avaliações
- The Role of Core Stability in Athletic FunctionDocumento23 páginasThe Role of Core Stability in Athletic Functionlumac108Ainda não há avaliações
- MainDocumento18 páginasMainInstalasi Rehabilitasi MedikAinda não há avaliações
- An Exploration of The Function of The Triceps Surae During Normal Gait Using Functional Electrical StimulationDocumento7 páginasAn Exploration of The Function of The Triceps Surae During Normal Gait Using Functional Electrical StimulationValentinus Adi PamungkasAinda não há avaliações
- Reducing Circumduction and Hip Hiking During Hemiparetic Walking Through Targeted Assistance of The Paretic Limb Using A Soft Robotic ExosuitDocumento8 páginasReducing Circumduction and Hip Hiking During Hemiparetic Walking Through Targeted Assistance of The Paretic Limb Using A Soft Robotic ExosuitExternalAinda não há avaliações
- Gait & Posture: Full Length ArticleDocumento6 páginasGait & Posture: Full Length ArticleDaniel GuevaraAinda não há avaliações
- Proximal Tibial Acceleration With and Without A Knee BraceDocumento9 páginasProximal Tibial Acceleration With and Without A Knee Braceapi-282691014Ainda não há avaliações
- Grupo 11 The Effect of Soft Tissue Graft Fixation in Anterior Cruciate 2433311890Documento8 páginasGrupo 11 The Effect of Soft Tissue Graft Fixation in Anterior Cruciate 2433311890César ArveláezAinda não há avaliações
- Effect of Isokinetic Training On Strength, Functionality and Proprioception in Athletes With Functional Ankle InstabilityDocumento11 páginasEffect of Isokinetic Training On Strength, Functionality and Proprioception in Athletes With Functional Ankle InstabilityJuan David Arenas MendozaAinda não há avaliações
- Archery Anatomy: An Introduction to Techniques for Improved PerformanceNo EverandArchery Anatomy: An Introduction to Techniques for Improved PerformanceNota: 4 de 5 estrelas4/5 (1)
- Improving Ankle and Knee Joint Stability: Proprioceptive Balancefit Discs DrillsNo EverandImproving Ankle and Knee Joint Stability: Proprioceptive Balancefit Discs DrillsAinda não há avaliações
- Blood Ow Restriction Augments The Skeletal Muscle Response During Very Low-Load Resistance Exercise To Volitional FailureDocumento14 páginasBlood Ow Restriction Augments The Skeletal Muscle Response During Very Low-Load Resistance Exercise To Volitional FailureFabiano LacerdaAinda não há avaliações
- Exercise Modification Strategies To Prevent and Train Around Shoulder PainDocumento14 páginasExercise Modification Strategies To Prevent and Train Around Shoulder PainFabiano LacerdaAinda não há avaliações
- Acute Skeletal Muscle Responses To Very Low-Load Resistance Exercise With and Without The Application of Blood Flow Restriction in The Upper BodyDocumento8 páginasAcute Skeletal Muscle Responses To Very Low-Load Resistance Exercise With and Without The Application of Blood Flow Restriction in The Upper BodyFabiano LacerdaAinda não há avaliações
- Ozaki 2013 e JapDocumento9 páginasOzaki 2013 e JapFabiano LacerdaAinda não há avaliações
- Dynamic Joint and Muscle Forces During Knee Isokinetic ExerciseDocumento8 páginasDynamic Joint and Muscle Forces During Knee Isokinetic ExerciseFabiano LacerdaAinda não há avaliações
- How To Carve A Gymnasts Ripped Back With Pull Ups by Anthony Arvanitakis 2016Documento1 páginaHow To Carve A Gymnasts Ripped Back With Pull Ups by Anthony Arvanitakis 2016Fabiano LacerdaAinda não há avaliações
- Training Technical and Training Related Aspects of Resistance Training Using Blood Flow Restriction in Competitive Sport-A ReviewDocumento13 páginasTraining Technical and Training Related Aspects of Resistance Training Using Blood Flow Restriction in Competitive Sport-A ReviewFabiano LacerdaAinda não há avaliações
- Bryan Mann - Developing Explosive Athletes PDFDocumento43 páginasBryan Mann - Developing Explosive Athletes PDFjole000100% (14)
- Ozaki J Gerontology 2011Documento8 páginasOzaki J Gerontology 2011Fabiano LacerdaAinda não há avaliações
- The Importance of Muscular Strength in Athletic PeDocumento32 páginasThe Importance of Muscular Strength in Athletic PeFabiano LacerdaAinda não há avaliações
- The Importance of Muscular Strength: Training ConsiderationsDocumento38 páginasThe Importance of Muscular Strength: Training ConsiderationsFabiano LacerdaAinda não há avaliações
- Understanding Your NeurotypeDocumento18 páginasUnderstanding Your NeurotypeFabiano Lacerda100% (6)
- Caffeine Supplementation For Powerlifting Competitions: An Evidence-Based ApproachDocumento13 páginasCaffeine Supplementation For Powerlifting Competitions: An Evidence-Based ApproachFabiano LacerdaAinda não há avaliações
- Lower Load Is More Effective Than Higher Load.17Documento7 páginasLower Load Is More Effective Than Higher Load.17Fabiano LacerdaAinda não há avaliações
- Frequencia Na MusculaçãoDocumento13 páginasFrequencia Na MusculaçãoFabiano LacerdaAinda não há avaliações
- Effects of Interval Aerobic Training Program With Recovery Bouts On Cardiorespiratory and Endurance Fitness in SeniorsDocumento23 páginasEffects of Interval Aerobic Training Program With Recovery Bouts On Cardiorespiratory and Endurance Fitness in SeniorsFabiano LacerdaAinda não há avaliações
- Dynamic Joint and Muscle Forces During Knee Isokinetic ExerciseDocumento8 páginasDynamic Joint and Muscle Forces During Knee Isokinetic ExerciseFabiano LacerdaAinda não há avaliações
- The Influence of Exercise Load With and Without Different Levels of Blood Flow Restriction On Acute Changes in Muscle Thickness and LactateDocumento7 páginasThe Influence of Exercise Load With and Without Different Levels of Blood Flow Restriction On Acute Changes in Muscle Thickness and LactateFabiano LacerdaAinda não há avaliações
- Pope2013JSCR ExerciseandBloodFlowRestrictionDocumento43 páginasPope2013JSCR ExerciseandBloodFlowRestrictionFabiano LacerdaAinda não há avaliações
- Exercise Modification Strategies To Prevent and Train Around Shoulder PainDocumento14 páginasExercise Modification Strategies To Prevent and Train Around Shoulder PainFabiano LacerdaAinda não há avaliações
- Yasuda 2015 e JapDocumento9 páginasYasuda 2015 e JapFabiano LacerdaAinda não há avaliações
- ASJM UE Weight Training For The Injured Athlete PDFDocumento11 páginasASJM UE Weight Training For The Injured Athlete PDFFabiano LacerdaAinda não há avaliações
- Lower Load Is More Effective Than Higher Load.17Documento7 páginasLower Load Is More Effective Than Higher Load.17Fabiano LacerdaAinda não há avaliações
- The Acute Muscle Swelling Effects of Blood Flow RestrictionDocumento11 páginasThe Acute Muscle Swelling Effects of Blood Flow RestrictionFabiano LacerdaAinda não há avaliações
- The Influence of Biological Sex and Cuff Width On Muscle Swelling, Echo Intensity, and The Fatigue Response To Blood Flow Restricted ExerciseDocumento10 páginasThe Influence of Biological Sex and Cuff Width On Muscle Swelling, Echo Intensity, and The Fatigue Response To Blood Flow Restricted ExerciseFabiano LacerdaAinda não há avaliações
- The Influence of Exercise Load With and Without Different Levels of Blood Flow Restriction On Acute Changes in Muscle Thickness and LactateDocumento7 páginasThe Influence of Exercise Load With and Without Different Levels of Blood Flow Restriction On Acute Changes in Muscle Thickness and LactateFabiano LacerdaAinda não há avaliações
- Scottetal - Inpress Exercisewithbloodflowrestriction Anupdatedevidence BasedapproachforenhancedmusculardevelopmentDocumento14 páginasScottetal - Inpress Exercisewithbloodflowrestriction Anupdatedevidence BasedapproachforenhancedmusculardevelopmentFabiano LacerdaAinda não há avaliações
- Apha 13302 PDFDocumento127 páginasApha 13302 PDFFabiano LacerdaAinda não há avaliações
- Physiological Assessment of Aerobic Training in SoDocumento11 páginasPhysiological Assessment of Aerobic Training in SoFabiano LacerdaAinda não há avaliações
- Training Technical and Training Related Aspects of Resistance Training Using Blood Flow Restriction in Competitive Sport-A ReviewDocumento13 páginasTraining Technical and Training Related Aspects of Resistance Training Using Blood Flow Restriction in Competitive Sport-A ReviewFabiano LacerdaAinda não há avaliações
- Doppler Ultrasonography of Lower Extremity ArterieDocumento35 páginasDoppler Ultrasonography of Lower Extremity Arterierizki100% (1)
- Medial Collateral Ligament Sprains - A Case StudyDocumento26 páginasMedial Collateral Ligament Sprains - A Case StudyomboAinda não há avaliações
- List of Common Compensation Patterns and Movement Dysfunctions - PreHab ExercisesDocumento17 páginasList of Common Compensation Patterns and Movement Dysfunctions - PreHab ExercisesEmiliano BezekAinda não há avaliações
- Strengthening Exercise IllustrationsDocumento2 páginasStrengthening Exercise IllustrationsafifahAinda não há avaliações
- Tang 2010Documento5 páginasTang 2010Elena ShekaAinda não há avaliações
- Patellar Tendonitis: Home ExercisesDocumento3 páginasPatellar Tendonitis: Home ExercisesCoupleFF BRAinda não há avaliações
- Biomechanical Considerations in Patellofemoral Joint RehabilitationDocumento7 páginasBiomechanical Considerations in Patellofemoral Joint RehabilitationJ Roberto Meza OntiverosAinda não há avaliações
- Gluteal RegionDocumento44 páginasGluteal RegionSamuel A OlowolayemoAinda não há avaliações
- Anterior Cruciate Ligament Revision ReconstructionDocumento9 páginasAnterior Cruciate Ligament Revision ReconstructionCésar ArveláezAinda não há avaliações
- Myofascial Muscle Chains - P. Jonckheere, Et Al., (Trigger, 1998) WWDocumento308 páginasMyofascial Muscle Chains - P. Jonckheere, Et Al., (Trigger, 1998) WW1cucu0100% (5)
- Ospe-Ll 16Documento35 páginasOspe-Ll 16Muthu GuhaanAinda não há avaliações
- The Great and Mysterious ButtDocumento6 páginasThe Great and Mysterious ButtaggybongAinda não há avaliações
- Perbedaan Intervensi Exercise Dengan 4 Single Limb Hopping Exercise Untuk Meningkatkan Stabilitas Ankle Pada Kasus KronikDocumento9 páginasPerbedaan Intervensi Exercise Dengan 4 Single Limb Hopping Exercise Untuk Meningkatkan Stabilitas Ankle Pada Kasus Kronikniken tri wiyandariAinda não há avaliações
- Talar FractureDocumento78 páginasTalar FractureRamin MaharjanAinda não há avaliações
- Lect 1 B MuscleDocumento11 páginasLect 1 B MuscleZaid AbdulqadirAinda não há avaliações
- Lower Extremity Arteries and VeinsDocumento97 páginasLower Extremity Arteries and VeinsManisanthosh KumarAinda não há avaliações
- Club FootDocumento24 páginasClub FootBhawna Pandhu100% (1)
- Lower Limb Lab SheetDocumento3 páginasLower Limb Lab SheetKelly TrainorAinda não há avaliações
- @physiocouk #ManchesterphysioDocumento48 páginas@physiocouk #Manchesterphysioduong hoang tinAinda não há avaliações
- ACL Reconstruction Postoperative ProtocolDocumento11 páginasACL Reconstruction Postoperative ProtocolNicusor AnghelAinda não há avaliações
- Gait AsessmentDocumento57 páginasGait Asessmentsurender_singh_43Ainda não há avaliações
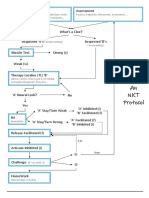
- NKT FlowChart - PDF Version 1 PDFDocumento2 páginasNKT FlowChart - PDF Version 1 PDFJay SarkAinda não há avaliações
- Ankle Assessment AUT NotesDocumento32 páginasAnkle Assessment AUT Notesandimaree11Ainda não há avaliações
- Femoral Triangle Anatomy and ContentsDocumento14 páginasFemoral Triangle Anatomy and ContentsSIDDHRATH ROYAinda não há avaliações
- Gluteal and Thigh Muscle Origins, Insertions and FunctionsDocumento3 páginasGluteal and Thigh Muscle Origins, Insertions and FunctionsKathleen CunananAinda não há avaliações
- The Influence of Altered Lower-Extremity Kinematics On Patellofemoral Joint Dysfunction - Powers 2003Documento8 páginasThe Influence of Altered Lower-Extremity Kinematics On Patellofemoral Joint Dysfunction - Powers 2003shivnairAinda não há avaliações
- Soft Tissue Injuries of The KneeDocumento3 páginasSoft Tissue Injuries of The KneeFarhan ShahidAinda não há avaliações
- AANA Advanced Arthroscopy The Foot and Ankle PDFDocumento223 páginasAANA Advanced Arthroscopy The Foot and Ankle PDFsuny007_bond100% (2)
- Functional Anatomy of The Hip JointDocumento14 páginasFunctional Anatomy of The Hip JointPeter SosaAinda não há avaliações
- Anatomy: The Ligaments of The Knee JointDocumento5 páginasAnatomy: The Ligaments of The Knee JointhumeraAinda não há avaliações