Você também pode gostar
- Temperature Control Waterbath Control System Using PID ControllerDocumento5 páginasTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufAinda não há avaliações
- Industrial Automation: (Getting Started Week - 1)Documento20 páginasIndustrial Automation: (Getting Started Week - 1)Gaurav SoniAinda não há avaliações
- Lab11 - Autotuning PDFDocumento26 páginasLab11 - Autotuning PDFEng. Ebrahim A. AlrohmiAinda não há avaliações
- Lab11 - AutotuningDocumento26 páginasLab11 - AutotuningEng. Ebrahim A. AlrohmiAinda não há avaliações
- PID Controlled Synchronous Motor For Power Factor CorrectionDocumento5 páginasPID Controlled Synchronous Motor For Power Factor CorrectionigoreliasAinda não há avaliações
- InTech-Pid Control TheoryDocumento17 páginasInTech-Pid Control TheoryAbner BezerraAinda não há avaliações
- BenchtopPIDController WhPaperDocumento26 páginasBenchtopPIDController WhPaperfirosekhanAinda não há avaliações
- Tuning of A PID Controller Using Ziegler-Nichols MethodDocumento7 páginasTuning of A PID Controller Using Ziegler-Nichols MethodTomKish100% (1)
- Finn Haugen. Telemark University College National Instruments ConfidentialDocumento27 páginasFinn Haugen. Telemark University College National Instruments ConfidentialtriplbingaziAinda não há avaliações
- Lab 5 Reportgroup Name IdDocumento16 páginasLab 5 Reportgroup Name IdMelaku DinkuAinda não há avaliações
- Group 4 Lab 5Documento16 páginasGroup 4 Lab 5Melaku DinkuAinda não há avaliações
- Temperature Control Water Bath System Using PID ControllerDocumento5 páginasTemperature Control Water Bath System Using PID Controllerprapya pokharelAinda não há avaliações
- AVR221 Discrete PID ControllerDocumento10 páginasAVR221 Discrete PID ControllerSadık KorkmazAinda não há avaliações
- Real Time Speed Control of DC Motor With Unknown Transfer Function Through PIDDocumento6 páginasReal Time Speed Control of DC Motor With Unknown Transfer Function Through PIDArbab HaiderAinda não há avaliações
- PID Control TheoryDocumento17 páginasPID Control TheoryManuel Santos MAinda não há avaliações
- Universidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoDocumento6 páginasUniversidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoAndres LozanoAinda não há avaliações
- Speed Control Simulation of DC Servomotor Using Hybrid PID-Fuzzy With ITAE Polynomials InitializationDocumento5 páginasSpeed Control Simulation of DC Servomotor Using Hybrid PID-Fuzzy With ITAE Polynomials InitializationWahyunggoro OAinda não há avaliações
- PID ControlDocumento17 páginasPID ControlUma MageshwariAinda não há avaliações
- Optimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranDocumento6 páginasOptimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranztztztztAinda não há avaliações
- PID Control For TemperatureDocumento3 páginasPID Control For TemperatureSathiya SeelanAinda não há avaliações
- Rajshahi University of Engineering and Technology: Heaven's Light Is Our GuideDocumento7 páginasRajshahi University of Engineering and Technology: Heaven's Light Is Our GuideMaksidur Rahman FahimAinda não há avaliações
- Self Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiDocumento7 páginasSelf Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiajieAinda não há avaliações
- Lecture2 3Documento25 páginasLecture2 3vrushalibhattAinda não há avaliações
- PID Furnace Temp ControlDocumento11 páginasPID Furnace Temp ControlashishAinda não há avaliações
- Mesb333 Pid ControlDocumento13 páginasMesb333 Pid ControlMohd KhairiAinda não há avaliações
- PID Control Tuning Methods and Intro To NonlinearDocumento36 páginasPID Control Tuning Methods and Intro To NonlinearKuanysh YessenzhanovAinda não há avaliações
- PID ControlDocumento32 páginasPID ControlSyamil RahmanAinda não há avaliações
- Thermal Characteristics of Pid Controller Water HeaterDocumento10 páginasThermal Characteristics of Pid Controller Water HeaterEhab QabashAinda não há avaliações
- Report 2 (PID)Documento5 páginasReport 2 (PID)Araragi KoyomiAinda não há avaliações
- Implementation of A PID Control System On Microcontroller (DC Motor Case Study)Documento5 páginasImplementation of A PID Control System On Microcontroller (DC Motor Case Study)Monata Sera100% (1)
- ME 4056 - Controls ReportDocumento14 páginasME 4056 - Controls ReportCampbell PattersonAinda não há avaliações
- PID Speed Control of DC Motor Using MicrocontrollerDocumento7 páginasPID Speed Control of DC Motor Using MicrocontrollerGias NawariAinda não há avaliações
- A Robust Auto-Tuning Scheme For PID Controllers: October 2020Documento7 páginasA Robust Auto-Tuning Scheme For PID Controllers: October 2020Lautaro Benjamín IbañezAinda não há avaliações
- Controllers and Thier Tuningclo2Documento31 páginasControllers and Thier Tuningclo2AreeshaAinda não há avaliações
- Application of Improved PID Controller in Motor Drive SystemDocumento19 páginasApplication of Improved PID Controller in Motor Drive SystemmahderAinda não há avaliações
- The Working Principle of A PID Controller For BeginnersDocumento15 páginasThe Working Principle of A PID Controller For BeginnersSaber AbdelaalAinda não há avaliações
- 20 THDocumento28 páginas20 THujjwal kumarAinda não há avaliações
- PID Controller Working Principle Explained For BeginnersDocumento6 páginasPID Controller Working Principle Explained For BeginnersPramillaAinda não há avaliações
- Implementing A PID Control System On A Microcontroller: Using The Example of A Microchip PIC 18F4550Documento12 páginasImplementing A PID Control System On A Microcontroller: Using The Example of A Microchip PIC 18F4550Venkatesan SundaramAinda não há avaliações
- Priprema Za Ispit 2Documento8 páginasPriprema Za Ispit 2Aleksandar MicicAinda não há avaliações
- PID Theory From WikipediaDocumento7 páginasPID Theory From Wikipediaputra-tzuAinda não há avaliações
- Control Manual Lab 8Documento12 páginasControl Manual Lab 8Hussain HadiAinda não há avaliações
- Proceedings of Spie: Microprocessor-Based PID Controller For Low-Temperature StudiesDocumento7 páginasProceedings of Spie: Microprocessor-Based PID Controller For Low-Temperature Studiesprapya pokharelAinda não há avaliações
- PID ControllersDocumento6 páginasPID ControllersNguyễn HảiAinda não há avaliações
- Design of Pid Controller For PLC: J. Paulusová, L. KörösiDocumento8 páginasDesign of Pid Controller For PLC: J. Paulusová, L. Körösiankit407Ainda não há avaliações
- PID Controller Design: Itce470: Control Sysytem Experiment No. 4Documento5 páginasPID Controller Design: Itce470: Control Sysytem Experiment No. 4HALIMAAinda não há avaliações
- Lab 7 Pid ControlDocumento6 páginasLab 7 Pid ControlFatin FarehahAinda não há avaliações
- PID ReportDocumento38 páginasPID ReportNishiya Vijayan100% (1)
- PID Control System Analysis and DesignDocumento48 páginasPID Control System Analysis and DesignAsghar AliAinda não há avaliações
- Bytronic SistemDocumento6 páginasBytronic SistemSedat IriçAinda não há avaliações
- Application Note AN2208: Universal PID-ThermoregulatorDocumento17 páginasApplication Note AN2208: Universal PID-ThermoregulatorJ Daniel PichardoAinda não há avaliações
- Implementing A PID Controller Using A PICDocumento15 páginasImplementing A PID Controller Using A PICJavier CharrezAinda não há avaliações
- Lab 5 ReportDocumento12 páginasLab 5 ReportMelaku DinkuAinda não há avaliações
- Fuzzy Pid BasicDocumento6 páginasFuzzy Pid BasichabbythomasaAinda não há avaliações
- 10 PIDControlKnospeDocumento9 páginas10 PIDControlKnospeOscar Ruiz SerranoAinda não há avaliações
- Design and Simulation of DA Based PID Controller Using Verilog CodingDocumento6 páginasDesign and Simulation of DA Based PID Controller Using Verilog Codingjamal2877Ainda não há avaliações
- Control of DC Motor Using Different Control StrategiesNo EverandControl of DC Motor Using Different Control StrategiesAinda não há avaliações
- Advanced Techniques and Technology of Computer-Aided Feedback ControlNo EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlAinda não há avaliações
- "Part - I - General Central Services Group B'Documento13 páginas"Part - I - General Central Services Group B'NarayanaAinda não há avaliações
- Patrol Box PlansDocumento6 páginasPatrol Box PlansPePe ProjectsAinda não há avaliações
- The PA Bible Addn 03 Microphones PDFDocumento4 páginasThe PA Bible Addn 03 Microphones PDFjosiasns5257100% (1)
- Brain Controlled Car For Disabled Using Artificial IntelligenceDocumento17 páginasBrain Controlled Car For Disabled Using Artificial IntelligenceMdkhanzAinda não há avaliações
- D91 PDFDocumento3 páginasD91 PDFJuan Diego ArizabalAinda não há avaliações
- A320 Documentation (1 CMP) PDFDocumento198 páginasA320 Documentation (1 CMP) PDFRamakrishnan AmbiSubbiah75% (4)
- Formulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film FormerDocumento11 páginasFormulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film Formersunaina agarwalAinda não há avaliações
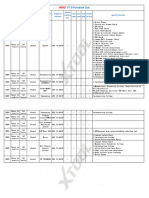
- V7.0 Function ListDocumento48 páginasV7.0 Function ListInyectronix VyhAinda não há avaliações
- RISC Vs CISCDocumento13 páginasRISC Vs CISCBehin SamAinda não há avaliações
- Chapter5 Memory ManagementDocumento78 páginasChapter5 Memory ManagementJackYuan JinFengAinda não há avaliações
- Legend:-: General Arrangement ACS550-124A-4 YN3A205086-GAADocumento12 páginasLegend:-: General Arrangement ACS550-124A-4 YN3A205086-GAANeeraj SharmaAinda não há avaliações
- Material 1 HOUSEHOLD CHORES PICTURE DICTIONARYDocumento12 páginasMaterial 1 HOUSEHOLD CHORES PICTURE DICTIONARYnerepeichAinda não há avaliações
- M2.2.9 Critical Review and Selection of NDT MethodsDocumento13 páginasM2.2.9 Critical Review and Selection of NDT MethodsAldy Bagus PratamaAinda não há avaliações
- Technical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaDocumento6 páginasTechnical Information Sheet: General Information: ISO 12944 TI - G 9 / UsaBash MatAinda não há avaliações
- 03 Transformers CT VTDocumento10 páginas03 Transformers CT VTEnrique G.Ainda não há avaliações
- SQL Server Connectivity Roadmap.: Preliminary TroubleshootingDocumento7 páginasSQL Server Connectivity Roadmap.: Preliminary Troubleshootingapi-3748582Ainda não há avaliações
- Dental CementDocumento74 páginasDental CementAisha samreenAinda não há avaliações
- ABM Chain HoistDocumento14 páginasABM Chain HoistZuwairi NawawiAinda não há avaliações
- Odi2-065r16m18s02-Q DS 0-0-0Documento3 páginasOdi2-065r16m18s02-Q DS 0-0-0leolima trustitAinda não há avaliações
- 92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021Documento20 páginas92 - Summary of Items Discussed in 4 - 2021 ADF On 13.8.2021trickyggAinda não há avaliações
- A35 Ostetricia Ginecologia PDFDocumento8 páginasA35 Ostetricia Ginecologia PDFAarthiAinda não há avaliações
- California Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsDocumento4 páginasCalifornia Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsAmyra MiaAinda não há avaliações
- Resistor DatasheetDocumento10 páginasResistor DatasheetEndradno KurniaAinda não há avaliações
- Wind Energy Unit-EEEDocumento6 páginasWind Energy Unit-EEEpfalencarAinda não há avaliações
- Chapter 1 Introduction To Green BuildingsDocumento19 páginasChapter 1 Introduction To Green BuildingsSunil BeheraAinda não há avaliações
- Freezing Point Depression and Boiling Point Elevation LabDocumento4 páginasFreezing Point Depression and Boiling Point Elevation LabBeatrice Dominique Caragay25% (4)
- Froth Flush ProcessDocumento33 páginasFroth Flush ProcessnivasssvAinda não há avaliações
- Curriculam Vitae: ObjectiveDocumento4 páginasCurriculam Vitae: ObjectiveSachin DeoAinda não há avaliações
- Test 4 Review SolutionsDocumento13 páginasTest 4 Review SolutionsFabio Suta ArandiaAinda não há avaliações
- BCM NotesDocumento25 páginasBCM NotesAman AgrawalAinda não há avaliações