Você também pode gostar
- DH ResumenDocumento2 páginasDH ResumenAlex Bastián Flores AillónAinda não há avaliações
- Cartesiano DHDocumento21 páginasCartesiano DHZamaria Hernandez ArroyoAinda não há avaliações
- Denavit HartenbergDocumento11 páginasDenavit HartenbergAarón Escribano GonzalesAinda não há avaliações
- Algoritmo de Denavit V2Documento1 páginaAlgoritmo de Denavit V2Andrey Jhonaider Mendoza MoralesAinda não há avaliações
- Convención Denavit-HartenbergDocumento3 páginasConvención Denavit-HartenbergYesi Salazar LimasAinda não há avaliações
- Robot Cilíndrico 4GDLDocumento17 páginasRobot Cilíndrico 4GDLAmilcar Ruiz JarquinAinda não há avaliações
- Solucion Ejercicio Algoritmo DHDocumento15 páginasSolucion Ejercicio Algoritmo DHDuvan RinconAinda não há avaliações
- Metodología de DenavitDocumento2 páginasMetodología de DenavitperroAinda não há avaliações
- Robotica Con MatlabDocumento95 páginasRobotica Con MatlabclaudioruAinda não há avaliações
- Algoritmo de Denavit HartenbergDocumento3 páginasAlgoritmo de Denavit HartenbergMariana EliasAinda não há avaliações
- Método Denavith - HartenbergDocumento13 páginasMétodo Denavith - HartenbergChloë RodríguezAinda não há avaliações
- Representación de Denavit-HartenbergDocumento1 páginaRepresentación de Denavit-HartenbergRafael Hernandez GonzalezAinda não há avaliações
- Resumen de DenavitDocumento1 páginaResumen de DenavitLizeth BenavidesAinda não há avaliações
- Reglas DHDocumento4 páginasReglas DHFAUSTINO DE JESUS CRUZAinda não há avaliações
- Algoritmo de Denavit - HartenbergDocumento4 páginasAlgoritmo de Denavit - HartenbergSantiago PullaguariAinda não há avaliações
- Algoritmo de Denavit-HartenbergDocumento3 páginasAlgoritmo de Denavit-HartenbergLuis LoyolaAinda não há avaliações
- DenavitDocumento2 páginasDenavitJose Ignacio Lopez Almanza100% (1)
- Cinematica DirectaDocumento2 páginasCinematica DirectaFrancisco Luis Galdón CastroAinda não há avaliações
- Algoritmo de Denavit HartenbergDocumento15 páginasAlgoritmo de Denavit HartenbergCristian AndrangoAinda não há avaliações
- Practica Nº1Documento3 páginasPractica Nº1Daniela Copa AliAinda não há avaliações
- Algoritmo de Denavit-HartenbergDocumento2 páginasAlgoritmo de Denavit-HartenbergWilberth EnriqueAinda não há avaliações
- Criterio de Denavit-HartenbergDocumento18 páginasCriterio de Denavit-HartenbergSarahí LagunaAinda não há avaliações
- Traduccion de Theory Applied RoboticsDocumento74 páginasTraduccion de Theory Applied RoboticsKenny Torres LunaAinda não há avaliações
- Parametros DHDocumento1 páginaParametros DHgermanAinda não há avaliações
- Algoritmo DenavitDocumento4 páginasAlgoritmo DenavitvictorAinda não há avaliações
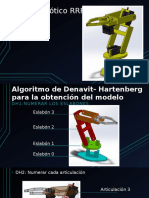
- Brazo Robótico RRRDocumento10 páginasBrazo Robótico RRRVPCCAAinda não há avaliações
- Parametros de DENAVIT-HARTENBERGDocumento8 páginasParametros de DENAVIT-HARTENBERGToño DueñasAinda não há avaliações
- Algoritmo de Denavit-HartenbergDocumento8 páginasAlgoritmo de Denavit-Hartenberghugoadrian quispebolivarAinda não há avaliações
- Prueba Denavit HartenvergDocumento8 páginasPrueba Denavit HartenvergRICARDO BLADIMIR HERRERA MANOBANDAAinda não há avaliações
- Algoritmo de DenavitDocumento1 páginaAlgoritmo de DenavitJesús LermaAinda não há avaliações
- Proyecto (6) Del Equipo 1.10Documento13 páginasProyecto (6) Del Equipo 1.10osiris sagastumeAinda não há avaliações
- Cinematica Directa Del Robot Kuka KR 5 Sixx r851Documento10 páginasCinematica Directa Del Robot Kuka KR 5 Sixx r851MonsserathAinda não há avaliações
- Parametros D-HDocumento22 páginasParametros D-HLane Claudio0% (1)
- Algoritmo de Denavit HartenbergDocumento6 páginasAlgoritmo de Denavit HartenbergGil Robles LoyaAinda não há avaliações
- 8.cinematica Directa de Robots IndustrialesDocumento42 páginas8.cinematica Directa de Robots IndustrialesEstrella Uno100% (1)
- Cinematica DirectaDocumento4 páginasCinematica Directapablofms1978Ainda não há avaliações
- Cusco - Perú 2022Documento19 páginasCusco - Perú 2022LUCERO QUISPE PUMAAinda não há avaliações
- Denavit HartenbergDocumento6 páginasDenavit HartenbergchendoAinda não há avaliações
- Cinemática Del Robot ManipuladorDocumento7 páginasCinemática Del Robot ManipuladorMICHELLE STEPHANIE ANDRADE GONZALEZAinda não há avaliações
- S (X, Y) C R P (X, Y) O C S P O C: Capitulo 1 Coordenada SectorialDocumento5 páginasS (X, Y) C R P (X, Y) O C S P O C: Capitulo 1 Coordenada SectorialSantiago TrannackAinda não há avaliações
- Hoja 5Documento3 páginasHoja 5JuanAinda não há avaliações
- Práctica 3 RobóticaDocumento34 páginasPráctica 3 Robóticacharleseli123Ainda não há avaliações
- Nyquist para Funciones de Fase Minima y No MinimaDocumento5 páginasNyquist para Funciones de Fase Minima y No MinimarxaviervaAinda não há avaliações
- Tema 3Documento42 páginasTema 3INÉS CÁCERES PABLOAinda não há avaliações
- Algoritmp de Denavit - HartenbergDocumento9 páginasAlgoritmp de Denavit - HartenbergThiago SantyAinda não há avaliações
- VI. Integracion en VariedadesDocumento12 páginasVI. Integracion en Variedadesboris laraAinda não há avaliações
- Lab Matriz DHDocumento9 páginasLab Matriz DHMao Blanco Rios100% (1)
- DH-PRP (Robotica)Documento29 páginasDH-PRP (Robotica)Olea Hernández rivasAinda não há avaliações
- Cinemática de Robots 4Documento35 páginasCinemática de Robots 4adrian bravoAinda não há avaliações
- Sistemas Dinámicos 2Documento6 páginasSistemas Dinámicos 2Arturo GómezAinda não há avaliações
- II-Movimiento Relativo-2020-21 JMCDocumento35 páginasII-Movimiento Relativo-2020-21 JMCoacrAinda não há avaliações
- IntroducciónDocumento11 páginasIntroducciónMariaAinda não há avaliações
- Cinematica Directa e Inversa-2009Documento64 páginasCinematica Directa e Inversa-2009Betoys58580100% (1)
- Cálculo II - Rep FinalDocumento2 páginasCálculo II - Rep FinalWilfredo ReynosoAinda não há avaliações
- Equipo 5 Etapa6Documento20 páginasEquipo 5 Etapa6Bryan GiovanniAinda não há avaliações
- Guía para LaboratorioDocumento4 páginasGuía para LaboratorioDavid CaleñoAinda não há avaliações
- Tesis BeamerDocumento40 páginasTesis BeamerGerardo ZubiagaAinda não há avaliações
- Hoja 3Documento3 páginasHoja 3JuanAinda não há avaliações
- Perspectiva curvilínea: Explorando la percepción de profundidad en la visión por computadoraNo EverandPerspectiva curvilínea: Explorando la percepción de profundidad en la visión por computadoraAinda não há avaliações
- Dinámica EC114 SilaboDocumento2 páginasDinámica EC114 SilabopruebaAinda não há avaliações
- Tercer Taller Topografia - EJ2Documento8 páginasTercer Taller Topografia - EJ2Neider Jose Campo HernandezAinda não há avaliações
- Energía EscalarDocumento3 páginasEnergía EscalarmanickAinda não há avaliações
- La Geografía Del Paisaje y La Geoecología: Teoría y EnfoquesDocumento32 páginasLa Geografía Del Paisaje y La Geoecología: Teoría y EnfoquesCaro AAinda não há avaliações
- Banco de Preguntas 2ADocumento4 páginasBanco de Preguntas 2AShirley Juliana Rosas DíazAinda não há avaliações
- Video 10Documento5 páginasVideo 10Idelsa MoscarielloAinda não há avaliações
- Practica 9Documento14 páginasPractica 9Ale LozanoAinda não há avaliações
- La Cuarta Dimensión en El ArteDocumento4 páginasLa Cuarta Dimensión en El ArteTamara MartinezAinda não há avaliações
- C - Sem 22 - Raz. MatematicoDocumento6 páginasC - Sem 22 - Raz. MatematicoYair Wëë UntëlaAinda não há avaliações
- Aportes en Caminos PDFDocumento31 páginasAportes en Caminos PDFjuan miranda lopezAinda não há avaliações
- MRUVDocumento7 páginasMRUVacemsaAinda não há avaliações
- Tuberias HidraulicasDocumento32 páginasTuberias HidraulicasChristopher B. Paco Aliaga100% (2)
- Tema Física MRU-MRUA, MCU y Caída LibreDocumento51 páginasTema Física MRU-MRUA, MCU y Caída LibreJuanMolinaAinda não há avaliações
- 06 - Ejercicios PropuestosDocumento24 páginas06 - Ejercicios PropuestosGílari BravoAinda não há avaliações
- ParabolaDocumento7 páginasParabolaMaxi RojaAinda não há avaliações
- 4 7Documento10 páginas4 7UzielColorsXDAinda não há avaliações
- Tema 4. GeometriaDocumento54 páginasTema 4. GeometriaNAHIA N.Ainda não há avaliações
- Poesia 70Documento447 páginasPoesia 70angelmdiaz100% (3)
- Tegmar Max - Universos ParalelosDocumento12 páginasTegmar Max - Universos Paralelosjose_lrsAinda não há avaliações
- Unidad 2 - Tarea 5 - Ejercicios de Funciones, Trigonometría y HipernometriaDocumento19 páginasUnidad 2 - Tarea 5 - Ejercicios de Funciones, Trigonometría y HipernometriaCristina Tascon ParedesAinda não há avaliações
- LABORATORIO DinamicaDocumento16 páginasLABORATORIO DinamicaJEFERSON MONTOYA DEL CASTILLOAinda não há avaliações
- 2 - Robótica - TransformacionesDocumento44 páginas2 - Robótica - TransformacionesKevinRevueltaGalvanAinda não há avaliações
- Laboratorio Arte Alameda Entrevista Tania AhedoDocumento5 páginasLaboratorio Arte Alameda Entrevista Tania Ahedo̶A̶l̶f̶r̶e̶d̶o̶ G̶a̶l̶l̶a̶r̶d̶o̶Ainda não há avaliações
- Teorema de Los Ejes Paralelos Grupo 1 EjerciciosDocumento18 páginasTeorema de Los Ejes Paralelos Grupo 1 EjerciciosCarlos SilveraAinda não há avaliações
- Dimensiones AdelanteDocumento19 páginasDimensiones AdelanteYvonne RoyAinda não há avaliações
- SESIÓN DE APRENDIZAJE Uriel GimDocumento4 páginasSESIÓN DE APRENDIZAJE Uriel GimnestorittAinda não há avaliações
- Presentación LejaniasDocumento26 páginasPresentación LejaniasEdson Orlando Hoyos CeronAinda não há avaliações
- Dinamica Propuestos 1Documento18 páginasDinamica Propuestos 1xostron33-1Ainda não há avaliações
- Modulo Matematica para Ingenieros PDFDocumento56 páginasModulo Matematica para Ingenieros PDFRosa BarruetoAinda não há avaliações
- QUIZ 1 SEM 3 Calculo III PDFDocumento5 páginasQUIZ 1 SEM 3 Calculo III PDFEdward LozanoAinda não há avaliações